器械组件及手术机器人的制作方法
本技术涉及一种器械组件及手术机器人,属于医疗器械。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。手术机器人中的器械盒与器械执行末端通过器械杆连接,其中,钳夹机构是目前常用的器械执行末端之一,通过钳夹机构可将施夹钳固定于目标手术部位,若血管处,起到止血目的。
2、由于施夹钳为消耗件,施夹钳消耗后需要将新的施夹钳安装于器械执行末端,但目前的施夹钳安装过程复杂,效率较低,导致手术操作效率降低。
技术实现思路
1、本技术提供一种器械组件及手术机器人,解决了相关技术中手术机器人的施夹钳安装复杂,导致手术机器人操作效率低的问题。
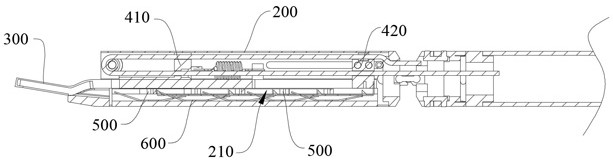
2、第一方面,本技术提供一种器械组件,包括:
3、器械盒;
4、器械杆,一侧与所述器械盒连接,所述器械杆内具有可容置施夹钳的容置区域,所述施夹钳活动设置于所述容置区域;
5、夹持件,与所述器械杆背离所述器械盒的一侧连接,所述夹持件包括相对设置的第一夹持片和第二夹持片,所述第一夹持片与所述第二夹持片之间为夹持区域,所述夹持区域与所述容置区域连通,所述夹持件配置为所述第一夹持片与所述第二夹持片可相向或相背移动,以使所述夹持件闭合或打开;
6、牵引件,配置为驱动所述第一夹持片和第二夹持片相向移动,以使所述夹持件闭合,当所述第一夹持片与所述第二夹持片相背移动,以使所述夹持件打开时,所述牵引件配置为驱动所述容置区域内的施夹钳移动至所述夹持区域。
7、本技术提出的器械组件中,夹持件通过器械杆与夹持件连接,使得夹持件可固定。夹持件的第一夹持片和第二夹持片之间可用于安装施夹钳,第一牵引部可驱动第一夹持片与第二夹持片第一夹持片与第二夹持片相向移动,使施夹钳被夹持,从而使得施夹钳可作用于手术部位处并脱离夹持件。当第一夹持片与第二夹持片相背移动时,可使得第一夹持片与第二夹持片之间的间距增大,第二牵引部可驱动未使用的施夹钳移动至第一夹持片与第二夹持片之间,可使未使用的施夹钳安装于夹持件上。这样通过牵引部可使器械组件进行手术操作,并且还可将未使用的施夹钳安装于夹持件,可提高器械组件的操作便利性,提高操作效率。
8、在一些实施方式中,所述牵引件包括第一牵引部,所述第一夹持片与所述第二夹持片活动连接,所述第一牵引部配置为压设于所述第一夹持片与所述第二夹持片的相背两侧,以使所述第一夹持片与所述第二夹持片相向移动。
9、通过第一牵引部压设第一夹持片和第二夹持片,可使得第一夹持片和第二夹持片受压力作用而相向移动,从而实现夹持动作。
10、在一些实施方式中,所述第一牵引部包括牵引槽,所述第一牵引部配置为朝向或背向所述夹持件移动,以使至少部分所述夹持件位于所述牵引槽内,或者使所述夹持件位于所述牵引槽外;
11、当至少部分所述夹持件位于所述牵引槽内时,所述牵引槽相对的内壁压接于所述第一夹持片与所述第二夹持片的相背两侧,以使所述第一夹持片与所述第二夹持片相向移动。
12、第一夹持片和第二夹持片位于牵引槽内后,牵引槽的内壁可作用于第一夹持片和第二夹持片,使得第一夹持片和第二夹持片受压力作用而相向移动。
13、在一些实施方式中,所述第一夹持片与所述第二夹持片弹性连接,当所述夹持件位于所述牵引槽外时,所述第一夹持片与所述第二夹持片之间的弹性力驱动所述第一夹持片与所述第二夹持片相背移动。
14、第一夹持片和第二夹持片相向移动后两者之间可具有弹性力,第一夹持片和第二夹持片的弹性力可驱动第一夹持片和第二夹持片相背移动而复位。
15、在一些实施方式中,所述牵引件还包括第二牵引部,当所述第一牵引部背向所述夹持件移动,以使所述夹持件位于所述牵引槽外时,所述第二牵引部配置为驱动所述施夹钳朝向所述夹持件移动至所述夹持区域。
16、第二牵引部可驱动施夹钳移动至夹持区域,从而使得施夹钳可装载于夹持件上。
17、在一些实施方式中,所述牵引件还包括牵引绳、第一牵引轮和第二牵引轮,所述第一牵引轮可转动地设置于所述器械杆,所述第二牵引轮可转动地设置于所述器械盒,所述牵引绳绕设于所述第一牵引轮和所述第二牵引轮,所述牵引绳包括位于所述第一牵引轮两侧的第一绳段和第二绳段,所述第一绳段与所述第一牵引部在朝向所述夹持件的方向上限位配合,所述第二绳段与所述第二牵引部相对固定;
18、当所述第一牵引轮和所述第二牵引轮沿第一方向转动时,所述第一绳段驱动所述第一牵引部朝向所述夹持件移动;
19、当所述第一牵引轮和所述第二牵引轮沿第二方向转动时,所述第二绳段驱动所述第二牵引部朝向所述夹持件移动,所述第一方向与所述第二方向互为反向。
20、通过牵引绳滑动后即可分别驱动第一牵引部和第二牵引部移动,使得第一牵引部可将夹持件外扩,或者使施夹钳移动至夹持区域。这样可不必单独设置用于驱动第一牵引部和第二牵引部的部件,简化了器械组件的结构。
21、在一些实施方式中,所述牵引件还包括弹性部,所述弹性部与所述第一牵引部连接,当所述第二牵引部朝向所述夹持件移动时,所述弹性部的弹性力可驱动所述第一牵引部背向所述夹持件移动。
22、弹性部可驱动第一牵引部背向夹持件移动而复位,这样当第二牵引部朝向夹持件移动时,第一牵引部可不受牵引绳驱动,避免第二牵引部朝向夹持件移动时与第一牵引部行程同步,以简化器械组件的结构。
23、在一些实施方式中,所述容置区域内可容置多个所述施夹钳,多个所述施夹钳沿朝向所述夹持件的方向依次设置,所述第一牵引部配置为可驱动多个所述施夹钳依次移动至所述夹持区域。
24、可一次在容置区域内装载多个施夹钳,这样不必在每个施夹钳被消耗后重新安装施夹钳,提高了器械组件的操作效率。
25、在一些实施方式中,所述第二牵引部包括连接块和支撑片,所述连接块与所述牵引绳连接,所述支撑片与所述连接块连接,所述支撑片上具有多个限位凸起,所述支撑片位于多个所述施夹钳的底部,多个所述限位凸起分别位与多个所述施夹钳在朝向所述夹持件的方向上限位配合。
26、支撑片上的多个限位凸起分别与多个施夹钳在朝向夹持件的方向限位配合,这样当连接块随牵引绳朝向夹持件移动后,多个限位凸起可分别推动多个施夹钳朝向夹持件移动。
27、在一些实施方式中,所述器械组件还包括限位件,所述限位件设置于所述器械杆,所述限位件与多个所述施夹钳在背离所述夹持件的方向上限位配合;
28、所述支撑片与所述连接块弹性连接,所述限位凸起背向所述夹持件的一侧具有引导面,当所述第二牵引部背向所述夹持件移动时,所述施夹钳压设于所述引导面,以使所述支撑片背向所述施夹钳移动至所述限位凸起位于所述施夹钳的底部一侧。
29、通过设置限位件可限制施夹钳背向夹持件移动,从而保证第二牵引部多次推动施夹钳后多个施夹钳与夹持件的间距可逐渐缩小。
30、第二方面,基于上文的器械组件,本技术还提供一种手术机器人,包括上文的器械组件。
31、本技术提出的手术机器人,包括上文的器械组件,可使得手术机器人的操作更为便利,操作效率提高。
- 还没有人留言评论。精彩留言会获得点赞!