一种可定制构建的基于MOF的磁控微机器人及其制备方法和应用
本发明属于微机器人,尤其涉及一种可定制构建的基于mof的磁控微机器人及其制备方法和应用。
背景技术:
1、微机器人是一类能够将外部能量转换为自身动能的微型装置,在环境修复、生物医学工程和微流控技术等领域展现出巨大的应用潜力。驱动微机器人的能量来源多种多样,包括声波、光、电、热和磁等。其中,磁控微机器人在生物医学领域具有独特的优势。
2、首先,磁场的优良穿透能力使得微机器人能够在不干扰生物组织的情况下实现精确操控。这种非侵入性的操作方式使得磁控微机器人在体内导航和靶向药物递送方面尤为有效。例如,通过外部磁场的引导,磁控微机器人可以准确到达肿瘤区域,实现高效的局部药物释放,从而减少全身性副作用。此外,磁控微机器人具备快速响应和高度可控性。通过调整磁场的强度和方向,可以实时控制微机器人的运动路径和速度,使其在复杂的生物环境中依然保持精确操作。同时,选择合适的材料和表面修饰,磁控微机器人能够在体内逐渐降解,释放无害的产物,避免长期滞留带来的潜在风险,这一特性确保了其在生物医学应用中的安全性。
3、金属有机框架材料(mofs)因其独特的结构和性能,在生物医学领域展现出巨大应用潜力。mofs由金属离子或簇与有机配体通过配位键连接而成,具有高度有序的孔道和极高的比表面积,能够高效装载和释放药物分子。通过调节有机配体和金属离子,可以精确控制mofs的孔道尺寸和形状,从而实现对不同药物分子的选择性装载,这一可调节性为个性化治疗和提高药物生物利用度提供了可能。在生物相容性和可降解性方面,mofs也表现出优异性能。许多mof材料能够在生理条件下逐渐降解,释放出无害的分解产物,避免长期滞留带来的潜在风险。此外,通过表面修饰或功能化,mofs可以进一步增强其生物相容性,并赋予特定生物功能,如靶向性和刺激响应性。例如,磁性mofs可以在外部磁场的引导下实现靶向递送,而ph响应性mofs则能够在肿瘤微环境中快速释放药物,提高治疗效果。
4、将磁控微机器人与mofs结合,将在生物医学领域产生独特优势。磁控微机器人能够实现精确的导航和操控,而mofs则提供高效的药物装载与释放能力。两者结合,可实现对药物递送系统的智能控制和精准操作。例如,磁控微机器人可携带mof结构,在外部磁场引导下,准确到达目标区域,通过mofs的孔道结构实现药物的定量释放,从而提高治疗效果。此外,磁控微机器人与mofs结合还可实现多功能化。例如,在mof结构中嵌入磁性纳米粒子,可以同时实现磁控导航和药物递送;或通过功能化mof表面,实现对特定生物分子的靶向识别和结合。这些多功能特性使得磁控微机器人与mofs的结合在生物医学领域具有广阔的应用前景。
5、但是,尽管磁控微机器人与mofs的结合在生物医学领域展现出巨大潜力,当前研究仍存在一些问题。例如,现有设计的mof微机器人结构缺乏灵活性,难以根据实际需求定制所需形状和功能。这种设计上的局限性限制了其在复杂生物环境中的应用效果。
技术实现思路
1、针对上述技术问题,本发明提出了一种可定制构建的基于mof的磁控微机器人及其制备方法和应用。通过本发明制备方法制备得到的微机器人可在磁场作用下实现高效的驱动,并可实现精确控制和执行复杂任务;同时本发明公开的制备方法简单,是一种可大量制备的可定制磁控mof微机器人的制备工艺。
2、为实现上述目的,本发明提供如下技术方案:
3、本发明技术方案之一:
4、一种可定制构建的基于mof的磁控微机器人的制备方法,包括以下步骤:
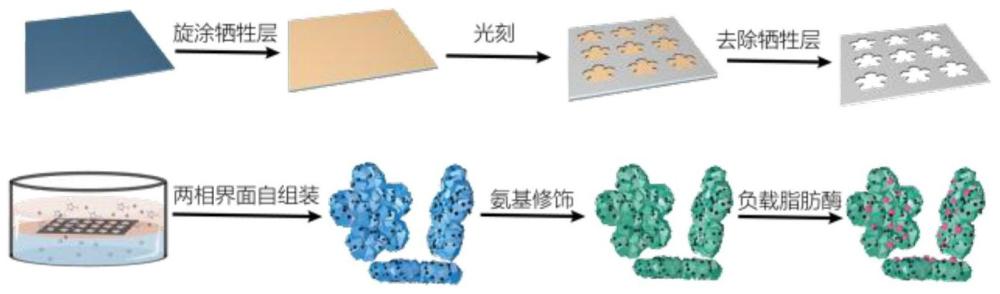
5、将微纳加工模板法与两相界面自组装法进行耦合,制备得到磁性mof微机器人;
6、利用配体交换法对所述磁性mof微机器人进行氨基修饰,再利用离子吸附法负载脂肪酶,最终得到所述可定制构建的基于mof的磁控微机器人。
7、优选的,所述微纳加工模板法的具体过程为:
8、在硅片上旋涂一层牺牲层(omnicot)后,烘干后旋涂光刻胶,烘干,然后覆盖上带有图案的掩模版,再依次进行曝光、烘干、显影和浸渍,得到具有所需图案的su-8膜。
9、进一步,所述光刻胶为su-8光刻胶;
10、所述显影过程中采用的显影液为pgmea。
11、进一步,所述具有所需图案的su-8膜的厚度为20μm。
12、进一步,所述图案包括螺旋形、s形、三角形、四边形、圆形、多瓣梅花形、锯齿状或碗状中的任一种。
13、有益效果:本发明限定的不同形状对应有不同的功能及应用,如螺旋状的微机器人可用于靶向药物输送,通过螺旋形设计,它们可以在体液中高效移动,精准地到达病灶区域进行治疗;碗状的微机器人可用于微操作和拾取应用,如在微观环境中进行物体的操控和运输;锯齿状的微机器人可用于细胞操控和组织工程,能够在特定位置实施切割作用,实现细胞的破碎以及血栓清除等;多瓣梅花状微机器人可用于流体动力学研究,能够在液体中高效推动和搅拌,有助于混合和反应过程。
14、优选的,所述两相界面自组装法的具体步骤为:
15、在容器中先加入金属盐溶液;然后放入su-8膜;再加入含有fe3o4和有机配体的正辛醇溶液进行自组装反应。
16、进一步,所述金属盐溶液和有机配体构建得到的mof包括zif-8、hkust-1、mof-177、mof-5、mof-74中的任一种。
17、进一步,所述金属盐溶液的浓度为0.17mol/l;和/或
18、所述正辛醇溶液中所述fe3o4的含量为800mg/ml,所述有机配体的浓度为0.08mol/l。
19、进一步,所述金属盐溶液为硝酸锌溶液;和/或
20、所述有机配体为2-甲基咪唑。
21、进一步,所述自组装反应的条件为:于室温下反应120min。
22、优选的,所述配体交换法的具体过程为:
23、将所述磁性mof微机器人浸入3-氨基-1,2,4-三唑溶液中,于50℃温度下反应120分钟。
24、进一步,所述3-氨基-1,2,4-三唑溶液的浓度为0.08mol/l。
25、优选的,所述离子吸附法的具体过程为:
26、将经过氨基修饰后的磁控mof微机器人放入脂肪酶溶液中反应12小时。
27、进一步,所述脂肪酶溶液为将脂肪酶溶于pbs中得到,脂肪酶浓度为2mg/ml,pbs的浓度为10mm。
28、本发明技术方案之二:
29、一种可定制构建的基于mof的磁控微机器人,由上述制备方法制备得到。
30、本发明技术方案之三:
31、一种可定制构建的基于mof的磁控微机器人的操控方法,包括以下步骤:
32、在施加外磁场条件下,通过手柄控制所述基于mof的磁控微机器人的运动方式;
33、其中所述外加磁场条件包括:恒定场(1-10mt,0.1-35hz)、xy平面旋转场(5-10mt,8-15hz)或xz平面旋转场(3-10mt,1-6hz)中的任一种。
34、优选的,具有螺旋形状的基于mof的磁控微机器人在外加xz平面旋转场(3-10mt,1-6hz)的条件下,进行高效移动并到达指定的目标位置。
35、优选的,具有碗状的基于mof的磁控微机器人在外加xy平面旋转场(5-8mt,8-15hz)以及手柄的联合控制下,能够运动到目标位置并拾取目标物,实现货物的拾取与运输。
36、优选的,具有锯齿状的基于mof的磁控微机器人在外加xy平面旋转场(8-10mt,8-10hz)以及手柄的联合控制下,能够实现高速旋转运动,对目标细胞或组织进行切割。
37、优选的,具有多瓣梅花状的基于mof的磁控微机器人在外加磁场(1-10mt,0.1-35hz)的条件下,在液体中高效运动和搅拌。
38、本发明技术方案之四:
39、一种可定制构建的基于mof的磁控微机器人在降解甘油三酯、递送靶向药物或治疗溶栓领域中的应用,其中,mof负载dox的载药率高达68.43%,且能够靶向治疗乳腺癌。此外载负载的药物也可以是具有溶血栓性质的t-pa。
40、优选的,所述甘油三酯的降解过程为:
41、在酸性的微环境下,利用酸使所述mof分解,从而释放所述脂肪酶用于降解甘油三酯。
42、与现有技术相比,本发明具有如下优点和技术效果:
43、1.本发明通过耦合金属有机框架材料合成中的成熟界面扩散自组装策略与微纳加工模板法,实现了具有可设计结构的微型机器人。这种方法使得多种结构的设计成为可能,能够灵活满足不同应用需求。此外,磁性纳米颗粒及药物或酶可以一体化装载,从而有效利用mof材料的孔结构,并简化合成过程。这为后续的磁操控和药物治疗奠定了坚实基础。
44、2.本发明通过优化磁场参数,可以实现靶向精准操控,结合不同的切割运动形式,可以进一步提高由于扩散引起的降解效率。此外,响应性药物或酶的释放将进一步增强治疗效果。结合这些特色的微型机器人与影像引导操控技术,将大大拓展其在生物医学领域的应用,为精准医学提供一种有效的策略。
- 还没有人留言评论。精彩留言会获得点赞!