用于关节镜手术的多自由度可调角度刚度的手持式松解钳
本发明涉及外科手术机器人,尤其涉及一种用于关节镜手术的多自由度可调角度刚度的手持式松解钳。
背景技术:
1、关节镜手术是一种微创技术,广泛应用于骨科领域,如髋关节盂唇修复、膝关节半月板切除和韧带重建等。关节镜手术通过关节镜器械的引导与操作,在极小的切口下完成复杂的诊疗操作。随着微创手术需求的增加,关节镜手术器械的设计与优化成为提升手术效率和安全性的关键。
2、目前,关节镜手术中使用的手术工具,包括松解钳等,大多为刚性直杆型,其结构通常包括手柄、传动杆和末端操作钳口。这种设计在保证刚性传动的同时,能够稳定地完成软组织的抓取、切割和松解操作。然而,由于刚性结构的限制,其灵活性较差,特别是在面对关节腔复杂解剖结构的时候,传统松解钳往往难以到达视野盲区,限制了手术的操作范围,增加了手术难度和时间。
3、为解决刚性器械灵活性不足的问题,近年来,部分改进型松解钳尝试引入角度调节功能。例如,通过在末端添加单自由度的关节,允许钳口在一定范围内转动。这种改进设计提升了器械的灵活性,使其能够适应更复杂的关节腔结构。然而,这种单自由度调节设计在实际应用中仍面临以下局限:首先,调节的角度范围较小,无法实现多方向操作;其次,在手术过程中缺乏刚度固定机制,器械在操作中可能出现松动或偏移,从而影响操作的精确性。
4、除了传统刚性器械的改良,连续型机器人技术近年来在内窥镜手术领域展现出巨大的潜力。这类机器人采用柔性、刚性或混合结构,通过多自由度调节,实现了复杂路径的弯曲和精准定位。连续型机器人的刚性关节设计和驱动方式使其在微创手术中的应用范围不断拓宽。然而,现有的连续型机器人结构多用于消化道或鼻窦等软组织手术,尚未针对关节镜手术场景进行专门优化。在关节镜手术中,器械需要具备较高的刚度以完成松解操作,同时还需要在狭小的解剖空间内灵活调整角度,这对连续型机器人的刚柔平衡提出了更高的要求。
5、为此,提出了一种手持式、可手动调整弯曲角度、并能实现刚度固定的松解钳,以适用于关节镜手术操作。
技术实现思路
1、本发明的目的是提供一种用于关节镜手术的多自由度可调角度刚度的手持式松解钳,以解决上述现有技术存在的问题。
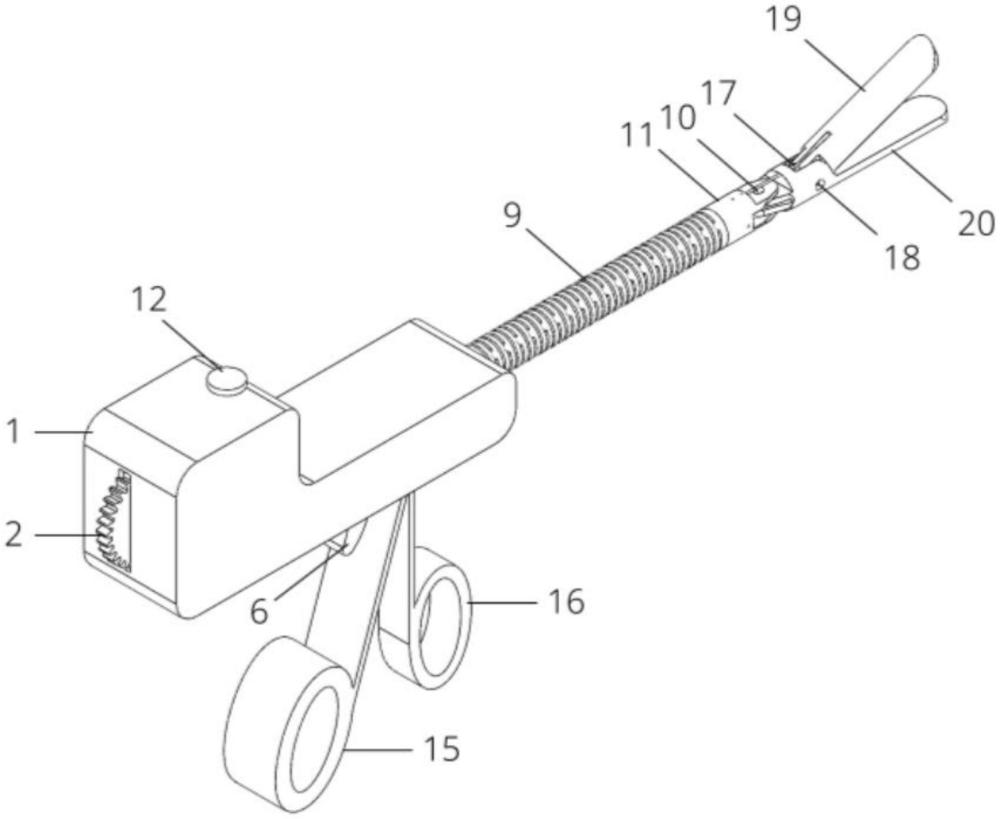
2、为实现上述目的,本发明提供了一种用于关节镜手术的多自由度可调角度刚度的手持式松解钳,包括外壳,所述外壳的一端设置有连续体段,所述连续体段远离所述外壳的一端安装有远端套筒,所述远端套筒通过销钉一连接有松解钳;所述外壳内设置有用于控制所述连续体段进行弯曲的左右弯曲控制机构和上下弯曲控制机构;所述外壳的内部设置有变刚度控制机构,所述变刚度控制机构用于对所述左右弯曲控制机构和所述上下弯曲控制机构进行限位;所述外壳的底部设置有用于控制所述松解钳开合的开合机构。
3、优选的,所述左右弯曲控制机构包括顶部旋钮,所述外壳的顶部开设有预留孔二,所述顶部旋钮通过所述预留孔二伸出所述外壳;所述顶部旋钮的底端固定套设有齿轮,所述外壳的内侧底壁上沿竖直方向固定连接有凸出圆柱二,所述顶部旋钮滑动套设在所述凸出圆柱二的外侧;所述顶部旋钮的外壁上绕设有左右弯曲驱动丝,所述左右弯曲驱动丝的两端分别固定连接在所述连续体段靠近所述远端套筒一端的左右两侧。
4、优选的,所述上下弯曲控制机构包括后端旋钮,所述外壳远离所述连续体段的一端开设有预留孔一,所述后端旋钮通过所述预留孔一伸出所述外壳;所述外壳的内侧壁上沿水平方向固定连接有凸出圆柱一,所述后端旋钮的中部固定套设有齿轮轴,所述齿轮轴滑动套设在所述凸出圆柱一上;所述外壳内部转动连接有传动齿轮,所述传动齿轮与所述后端旋钮啮合,所述后端旋钮与所述齿轮不接触;所述齿轮轴上绕设有上下弯曲驱动丝,所述上下弯曲驱动丝的两端分别与所述固定连接在所述连续体段靠近所述远端套筒一端的上下两侧。
5、优选的,所述传动齿轮滑动套设在所述顶部旋钮上,且所述传动齿轮位于所述齿轮的上方;所述传动齿轮与所述齿轮之间设置有长垫板,所述长垫板与所述外壳固定连接,所述长垫板用于对所述传动齿轮进行支撑。
6、优选的,所述变刚度控制机构包括按钮,所述按钮为t形结构;所述外壳的底部开设有预留孔三,所述按钮的底部通过所述预留孔三伸出所述外壳,且所述按钮的底部滑动设置在所述预留孔三内;所述外壳的内侧顶部固定连接有压紧挡板,所述按钮的顶部位于所述压紧挡板靠近所述连续体段的一侧,且所述按钮的顶部与所述压紧挡板限位配合;所述按钮靠近所述预留孔一的一端套设有弹簧,所述外壳的内侧底部固定连接有凸台,所述凸台设置于所述压紧挡板远离所述连续体段的一侧,所述弹簧的两端分别与所述凸台、所述压紧挡板抵接;所述齿轮二和所述传动齿轮均通过所述按钮进行限位。
7、优选的,所述按钮靠近所述预留孔一的一端为锥形缺口形状。
8、优选的,所述松解钳包括上钳和下钳,所述下钳通过所述销钉一转动连接在所述远端套筒上;所述上钳上固定连接有销钉二,所述上钳通过所述销钉二转动连接在所述下钳上,所述开合机构与所述上钳传动配合。
9、优选的,所述开合机构包括后手柄、前手柄和松解钳驱动丝,所述外壳的底部开设有预留孔四,所述后手柄和所述前手柄均通过所述预留孔四伸入至所述外壳内,所述外壳的内壁上沿水平方向固定连接有凸出圆柱三,所述后手柄固定套设在所述凸出圆柱三上,所述前手柄滑动套设在所述凸出圆柱三上;所述松解钳驱动丝固定绕设在所述销钉二上,且所述松解钳驱动丝的两端分别与所述后手柄、所述前手柄固定连接。
10、优选的,所述连续体段靠近所述远端套筒的一端开设有两个孔,两个所述孔对称设置,所述松解钳驱动丝依次穿过所述孔并与所述销钉二固定连接。
11、优选的,所述外壳靠近所述连续体段的一端开设有预留孔五,所述连续体段通过所述连续体段五安装在所述外壳上,且所述外壳通过所述连续体段五与所述连续体段连通。
12、与现有技术相比,本发明具有如下优点和技术效果:
13、1、提高操作灵活性:
14、本发明采用多自由度设计,通过后端旋钮和顶部旋钮的独立控制,实现连续体段的弯曲调整,可适应髋关节等复杂解剖结构。与传统单自由度或刚性直杆型松解钳相比,能够灵活到达视野盲区,显著提升手术操作范围和适应性。
15、2、增强操作稳定性:
16、本发明引入刚度调节和固定机制,通过按钮控制齿轮锁定,在角度调整后实现快速刚度锁定,避免手术操作中因松动或角度偏移导致的误操作。
17、3、提升手术精度和效率:
18、连续体段的多自由度调节和稳定的刚度锁定功能相结合,使得手术器械的定位和调整更加快速精准。相较于现有技术,本发明减少了手术器械的反复调整次数,降低了手术时间,提高了操作效率,有助于降低患者创伤和术后恢复时间。
19、4、优化人机交互设计:
20、本发明采用符合人体工学的旋钮控制设计,操作简单直观,符合医师的惯性思维逻辑,大幅降低了学习成本。
21、5、适用性强:
22、本发明的尺寸设计紧凑,能够适应狭小的关节腔操作需求,并具有良好的适配性,不仅局限于髋关节镜手术场景下,也可广泛应用膝关节镜、肩关节镜等场景。
23、6、节约资源并降低成本:
24、本发明通过集成手持式设计,取消了复杂的外部驱动机构,降低了制造和维护成本。与传统刚性器械或连续体机器人相比,具有更高的经济性和临床推广价值。
- 还没有人留言评论。精彩留言会获得点赞!