把持载荷检测器件的制作方法
1.本实用新型涉及检测在用户把持的状态下施加的载荷的把持载荷检测器件。
背景技术:
2.专利文献1公开了手持式等长运动装置。专利文献1所公开的手持式等长运动装置由用户对该装置的表面施加推压那样的力。所施加的载荷传递到测力传感器。由此,测力传感器检测出用户对该装置施加的力。
3.专利文献1:日本特开2009-95651号公报
4.一般作为检测载荷的装置,例如存在检测用户的握力等的健康器具。健康器具例如被使用在训练场、家庭、或者医院等室内。这样的健康器具沉重且体积大,因此难以携带搬运。因此,期望能够容易携带且简单地使用的健康器具。
技术实现要素:
5.因此,本实用新型的目的在于提供一种能够容易携带且简单地使用的把持载荷检测器件。
6.本实用新型的把持载荷检测器件的特征在于,具备:筒状的壳体,供用户把持;以及传感器,粘贴于上述壳体,检测因上述用户的把持而施加在上述壳体的载荷。
7.本实用新型所涉及的把持载荷检测器件的壳体是筒状。因此,用户容易把持壳体,并且容易搬运。另外,用户在把持筒状的壳体的状态下容易施加载荷。例如,用户能够通过轻轻地握住或扭转壳体等简单的动作对壳体施加载荷。最强的载荷是用户分别用力握住壳体的两端的状态下的扭转动作。另外,由于传感器粘贴在筒状的壳体,因此能够检测施加于壳体的载荷。由此,用户能够通过简单的动作使用本实用新型所涉及的把持载荷检测器件。
8.根据本实用新型,能够容易携带且简单地使用。
附图说明
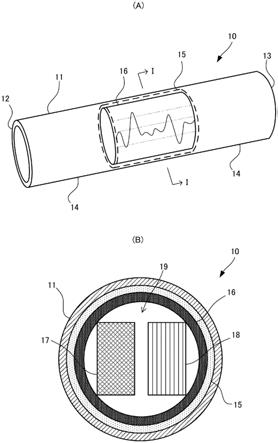
9.图1的(a)是表示第一实施方式所涉及的把持载荷检测器件的结构的立体图,图1的(b)是图1的(a)的i-i线的剖视图。
10.图2的(a)是将第一实施方式所涉及的传感器展开为平面状的俯视图,图2的(b)是图2的(a)的ii-ii线的剖视图。
11.图3的(a)和图3的(b)是表示聚乳酸膜的单轴拉伸方向、电场方向、聚乳酸膜的变形的关系的图。
12.图4的(a)是表示对第一实施方式所涉及的把持载荷检测器件施加扭转变形的情况的一个例子的示意图,图4的(b)是表示模拟了对第一实施方式所涉及的把持载荷检测器件施加扭转变形的情况下而产生的应力的结果的示意图。
13.图5的(a)是作为第一实施方式所涉及的把持载荷检测器件的应用例,对与充电台的组合进行说明的示意图,图5的(b)是对在充电台充电中的第一实施方式所涉及的把持载
荷检测器件进行说明的示意图。
14.图6的(a)是表示第二实施方式所涉及的把持载荷检测器件的结构的立体图,图6的(b)是图6的(a)的iii-iii线的剖视图。
15.附图标记说明
16.10、20
…
把持载荷检测器件;11、61
…
壳体;15、63
…
传感器;16
…
显示部;21
…
压电膜;65
…
把持部。
具体实施方式
17.图1的(a)是表示第一实施方式所涉及的把持载荷检测器件10的结构的立体图,图1的(b)是图1的(a)的i-i线的把持载荷检测器件10的剖视图。此外,在图1的(a)中,传感器15用虚线表示。在图1的(a)和图1的(b)中,省略了布线等。
18.如图1的(a)和图1的(b)所示,把持载荷检测器件10具备壳体11、传感器15、显示部16、微型计算机(以下,称为微机。)17、以及传感器用检测电路18。壳体11具有第一端部12和第二端部13。壳体11的形状是筒状。壳体11具有从第一端部12遍及到第二端部13的内部空间19。壳体11的第一端部12和第二端部13侧开口。但是,壳体11的第一端部12和第二端部13侧也可以关闭。
19.传感器15和显示部16配置于壳体11的轴向上的中央部分。把持载荷检测器件10在大致中央部分具有重心。因此,用户在用双手把持把持载荷检测器件10的第一端部12侧和第二端部13侧时,在各个手均等地承受载荷。
20.传感器15的形状是片状。传感器15粘贴在壳体11的内侧。传感器15的布线从壳体11的外部看不到。因此,把持载荷检测器件10成为简单的设计。另外,传感器15根据壳体11的变形而变形。传感器15如以下详细地说明那样检测壳体11的变形。
21.此外,传感器15也可以粘贴于壳体11的外侧。该情况下,传感器15被例如由树脂构成的膜等保护材料覆盖。作为覆盖传感器15的保护材料,优选例如pet等那样的具有透光性的膜。
22.显示部16由有机el或者无机el等薄膜显示器构成。显示部16的形状是片状。显示部16能够变形。显示部16以卷成筒状的状态配置于壳体11的内部空间19。显示部16例如粘贴在传感器15。此外,显示部16也可以粘贴在壳体11的外侧。在传感器15处于显示部16的内侧的情况下,传感器15也可以是不透明。
23.微机17和传感器用检测电路18配置于壳体11的内部空间19中显示部16的内侧。微机17和传感器用检测电路18被显示部16覆盖,从外部无法看到。因此,把持载荷检测器件10成为简单的外观。
24.把持载荷检测器件10具备未图示的电源。电源与微机17同样,配置于壳体11的内部空间19中显示部16的内侧。电源与微机17连接。
25.微机17也可以具备未图示的通信部。通信部是用于接受信号的输入并输出信号的接口。通信部在功能上具备接收部和发送部。接收部从把持载荷检测器件10的外部接收信息。例如,接收部接收应在显示部16显示的信息。另外,发送部将与传感器15的检测值相关的信息向把持载荷检测器件10的外部发送。
26.传感器用检测电路18如以下详细地说明那样,检测由于壳体11的变形而在传感器
15产生的电荷。微机17输入传感器用检测电路18的检测值。微机17将与传感器用检测电路18的检测值对应的图像显示在显示部16。此外,显示部16不一定是必要的结构。
27.壳体11由具有透光性的部件构成。例如,壳体11由具有透光性的树脂构成。作为具有透光性的树脂,例如,优选丙烯酸、聚碳酸酯、pet、聚氯乙烯、或者abs等树脂。若使用上述树脂作为构成壳体11的树脂,则能够廉价地得到透明度高的壳体11。进而,更优选使用丙烯酸树脂作为构成壳体11的树脂。通过使用丙烯酸树脂作为构成壳体11的树脂,从而能够得到坚韧的壳体11,使壳体11的耐久性提高,并且壳体11的透明度变高。若壳体11具有高的透明度,则把持载荷检测器件10的外观变美。另外,把持载荷检测器件10由于容易辨识污渍,因而可以及时处理干净。并且,在传感器15具有透光性的情况下,用户能够经过壳体11和传感器15看到显示部16。这样显示部16能够从外部确认,因此能够配置于壳体11的内部。在显示部16粘贴在壳体11的外侧的情况下,壳体11也可以是不透明。
28.壳体11具有两个把持区域14。把持区域14分别是壳体11中的第一端部12侧和第二端部13侧的一部分。把持区域14是不与显示部16重叠的区域。因此,在用户把持把持区域14时,确保显示部16能够可见。
29.壳体11的形状例如是圆筒那样的筒状。因此,用户容易把持壳体11,并且容易搬运。另外,在壳体11的内部仅配置有电源及电路等部件。壳体11的内部的大部分是空洞。因此,把持载荷检测器件10非常轻。例如,用户能够将其放入包等中进行搬运。由此,用户能够不受时间或场所限制而使用把持载荷检测器件10。把持载荷检测器件10能够用作对壳体11施加载荷的健康器具。例如,用户把持把持载荷检测器件10的把持区域14,进行扭转壳体11的动作。用户能够这样使用把持载荷检测器件10,进行例如肌肉力量训练。
30.此外,壳体11的形状不限于圆筒,例如也可以是椭圆、或者多边形的截面形状。在壳体11为多边形的情况下,与圆筒相比,手不易滑动。另外,壳体11也可以实施防滑等处理。例如,壳体11被实施滚花加工。由此,用户容易稳定地把持壳体11,容易对壳体11施加大的载荷。
31.传感器15检测由于用户的把持而施加到壳体11的载荷。对于传感器15的检测方法,在以下进行详细地说明。
32.图2的(a)是将传感器15展开为平面状的俯视图,图2的(b)是图2的(a)的ii-ii线的剖视图。此外,图2的(b)为了便于说明,增加厚度来表示。图3的(a)和图3的(b)是表示聚乳酸膜的单轴拉伸方向900、电场方向、聚乳酸膜的变形的关系的图。
33.如图2的(a)和图2的(b)所示,传感器15具有压电膜21、第一电极22、以及第二电极23。压电膜21具有第一主面151和第二主面152。压电膜21分别在第一主面151侧具备第一电极22,在第二主面152侧具备第二电极23。
34.作为第一电极22和第二电极23,优选使用ito、zno、银纳米线、碳纳米管、石墨烯等无机类的电极和以pedot(聚噻吩)、聚苯胺等为主成分的有机类的电极中的任一种。通过使用这样的材料,能够使第一电极22和第二电极23成为透明的透明电极。此外,传感器15不必为透明的,也可以使用银、铜以及铝等材料。该情况下,用户无法经过传感器15看到显示部16,因此传感器15配置为处于显示部16的内侧。在配置为传感器15处于显示部16的内侧的状态下,也可以将传感器15和显示部16的双方配置于壳体11的内部或外部。另外,也可以传感器15处于壳体11的内部,显示部16配置于壳体11的外部。
35.压电膜21形成为矩形形状。压电膜21只要是具有压电性的膜即可。压电膜21例如由单轴拉伸的聚乳酸(pla)、进而由l型聚乳酸(plla)形成。
36.在本实施方式中,压电膜21由单轴拉伸的l型聚乳酸(plla)形成。压电膜21在粘贴于壳体11时,在大致沿着壳体11的轴向的方向上单轴拉伸(参照图4的(a)和图4的(b)所示的空心箭头)。
37.将压电膜21的单轴拉伸方向在以下称为单轴拉伸方向900。优选单轴拉伸方向900在贴附于壳体11时,相对于壳体11的轴向或周向形成0
°
的角度或者90
°
的角度。但是,角度并不限于此,只要鉴于压电膜21的特性或使用状态设计成最佳的角度即可。
38.此外,单轴拉伸方向900不限于相对于壳体11的轴向或者周向为准确的0
°
,也可以是大致0
°
。大致0
°
是指例如包括0
°±
10
°
左右的角度。这些角度基于把持载荷检测器件10的用途,根据检测精度等整体的设计,被适当地决定。单轴拉伸方向900相对于壳体11的轴向或者周向形成90
°
的角度的情况也是同样的。另外,单轴拉伸方向900不限于相对于壳体11的轴向或者周向形成大致0
°
或者大致90
°
的角度,只要是能够检测变形的情况,任何角度都能够被本实用新型采用。
39.上述的plla是手性高分子,主链具有螺旋构造。plla单轴拉伸,分子取向时,具有压电性。而且,单轴拉伸的plla通过压电膜21的平膜面被变形而极化。此时,极化的大小由通过按压而使平膜面向与该平膜面正交的方向位移的位移量唯一地决定。单轴拉伸的plla的压电常数在高分子中属于非常高的种类。
40.如图3的(a)所示,若压电膜21在第一对角线910a的方向收缩,在与第一对角线910a正交的第二对角线910b的方向上延伸,则在从纸面的背侧朝向表侧的方向上产生电场。即,压电膜21在将厚度方向的中立面定义为0电位的情况下,在纸面表侧产生负电位。如图3的(b)所示,压电膜21在第一对角线910a的方向延伸,并在第二对角线910b的方向收缩的情况下也产生电荷,但极性相反,在从纸面的表面朝向背侧的方向上产生电场。即,压电膜21在纸面表侧产生正电位。
41.聚乳酸在基于拉伸的分子的取向处理中产生压电性,因此不需要如pvdf等其他的压电性聚合物或者压电陶瓷那样进行极化处理。即,不属于铁电体的plla的压电性不是如pvdf或pzt等的铁电体那样通过离子的极化来表现的,而是来源于作为分子的特征构造的螺旋构造。单轴拉伸的plla的压电常数为5pc/n以上30pc/n以下左右,在高分子中具有非常高的压电常数。一般批量生产的plla的压电常数为7pc/n以上10pc/n以下左右。即使是这样批量生产的plla,也能够灵敏度良好地检测数百nm以上数μm以下左右的微小的位移。检测灵敏度也根据传感器所使用的聚乳酸的尺寸、粘贴方法、放大器的性能而变化。
42.在plla中不存在自发极化,不显示铁电性。因此,不产生由其他的铁电性的压电体产生的热电性。因此,使用plla的传感器不会产生基于热的信号,能够准确地仅检测位移,因此适合用于生物体所接触的物体。并且,观察到随时间变化pvdf等的压电常数的变动,根据情况有时压电常数显著降低,但plla的压电常数随时间变化而极其稳定。因此,能够不受周围环境影响,高灵敏度地检测压电膜21的变形。通过使用plla,能够可靠且高灵敏度地检测传导到压电膜21的变形。因此,能够可靠地检测施加在壳体11的变形。
43.此外,拉伸倍率优选为3~8倍左右。通过在拉伸后实施热处理,促进聚乳酸的伸展链晶体的结晶化,提高压电常数。此外,在双轴拉伸的情况下,通过使各自的轴的拉伸倍率
不同,能够得到与单轴拉伸同样的效果。例如,在以某个方向为x轴,在该方向上实施8倍的拉伸,在与该轴正交的y轴方向上实施2倍的拉伸的情况下,关于压电常数,能够得到与大概在x轴方向上实施4倍的单轴拉伸的情况同等的效果。单纯地单轴拉伸的膜容易沿着拉伸轴向裂开,因此通过进行上述那样的双轴拉伸能够稍微增加强度。
44.另外,plla的压电输出常数(=压电g常数,g=d/ε
t
)较大。因此,通过使用plla,能够非常高灵敏度地检测压电膜21的变形。
45.但是,传感器15不限于使用plla的压电传感器。传感器15也可以是使用pvdf的压电传感器。传感器15也可以是应变传感器。只要pvdf的压电传感器、或者应变传感器配置为检测壳体11的扭转变形(倾斜方向的变形)即可。
46.接下来,对把持载荷检测器件10的使用以及传感器15的检测进行说明。图4的(a)是表示对把持载荷检测器件10施加扭转变形的情况的一个例子的示意图,图4的(b)是表示模拟对把持载荷检测器件10施加扭转变形的情况下产生的应力的结果的示意图。图4的(a)表示为立体图,图4的(b)表示为侧视图。
47.首先,用户分别以正手对把持载荷检测器件10的两个把持区域14进行把持。此外,用户也可以分别以反手对把持载荷检测器件10的两个把持区域14进行把持。另外,用户也可以用正手对把持载荷检测器件10的一个把持区域14进行把持,以反手把持另一个。并且,用户也可以用两个手掌来把持,以便覆盖第一端部12和第二端部13的开口。用户根据把持载荷检测器件10的把持方法,使用手臂的不同的肌肉。由此,用户能够训练手臂的不同的肌肉。另外,用户也可以用大腿夹住把持载荷检测器件10的一个把持区域14并固定,用双手把持另一个把持区域。另外,用户能够通过改变把持载荷检测器件10的把持方法,进行循环训练。
48.如图4的(a)和图4的(b)所示,用户对把持载荷检测器件10的壳体11施加扭转的变形。即,用户对把持载荷检测器件10施加剪切力。由此,用户分别向壳体11的第一端部12侧施加箭头f1所示的方向的力,向壳体11的第二端部13侧施加箭头f2所示的方向的力。
49.此时,壳体11产生用户无法视觉辨认的程度、例如1μm左右的微小的变形。在壳体11中产生压缩应力s1和拉伸应力s2。压缩应力s1和拉伸应力s2与用户所施加的扭转变形的大小对应。此外,图4的(a)和图4的(b)所示的压缩应力s1及拉伸应力s2是代表性地表示的应力,在壳体11的轴向以及周向上还产生同样的应力。
50.传感器15根据壳体11的变形而一同变形。由此,传感器15的压电膜21变形。压电膜21产生压缩应力s1和拉伸应力s2。压电膜21产生大小与压缩应力s1及拉伸应力s2成比例的极化。由此,传感器用检测电路18检测为了中和产生的极化而移动的电荷。即,传感器15能够产生与用户施加的扭转变形的大小对应的电荷。
51.压电膜21的单轴拉伸方向900相对于壳体11的轴向形成0
°
的角度。压缩应力s1和拉伸应力s2分别相对于单轴拉伸方向900形成大体45
°
的角度。因此,压电膜21能够高效地产生电荷。此外,即使在压电膜21的单轴拉伸方向900相对于壳体11的轴向形成90
°
的角度的情况下,压缩应力s1和拉伸应力s2也分别相对于单轴拉伸方向900形成大体45度的角度。因此,即使在这种情况下,压电膜21也能够高效地产生电荷。
52.传感器用检测电路18还可以具备积分电路。传感器用检测电路18累计在压电膜21中产生的电荷并计算为电压值。微机17计算由传感器用检测电路18检测出的电压值作为壳
体11的变形的大小、即用户施加在壳体11的载荷。此外,在传感器用检测电路18不具备积分电路的情况下,检测的电荷量成为与壳体11的变形的速度成比例的值。
53.微机17将计算出的载荷显示在显示部16。例如,如图1的(a)所示,显示部16用图表显示施加在壳体11的载荷。由此,显示部16能够向用户可视地表示施加到壳体11的载荷。另外,显示部16不仅可以用图表显示,也可以用其他各种方式可视地表示载荷。例如,显示部16以颜色根据载荷而变化的方式进行显示。该情况下,显示部16在载荷较弱时显示为绿色,通过逐渐变强而从绿色变化为黄色,在非常强时显示为红色。另外,显示部16也可以使用数字、文字、或者符号来显示载荷。
54.显示部16作为一个显示方式,也可以显示壳体11疑似扭曲的图像。例如,显示部16也可以根据检测出的力的大小,而显示将壳体11扭转成螺旋状的图像、拧布的图像、或者如绳子那样搓捻绳束的图像等。由此,用户会产生犹如对显示在显示部16的物体施加力那样的错觉。因此,用户感觉到壳体11扭曲,因此能够在确实感觉到所施加的载荷的同时进行训练。另外,用户感觉到对显示在显示部16的物体施加了力,因此与在显示部16上什么也不显示的情况相比,能够对壳体11施加较大的载荷。显示部16也可以根据施加到壳体11的力,显示有些被破坏那样的图像。例如,微机17在显示部16显示用户破坏的目标物体(例如冰)、和对用户破坏该目标物体的指示。若用户扭转壳体11,则微机17将根据用户施加到壳体11的载荷而破坏目标物体的情况显示在显示部16。由此,用户感到实际破坏了目标物体的一种错觉。因此,通过在显示部16以用户自然地施加力的方式显示图像,把持载荷检测器件10能够引导用户对壳体11的施加载荷的状态。此外,能够根据用户的级别或者训练的级别来变更显示在显示部16的目标物体的破坏的难易性。
55.用户能够从显示部16确认施加到壳体11的载荷。因此,用户能够一边调节载荷一边进行训练。另外,把持载荷检测器件10向用户显示由传感器用检测电路18检测出的载荷,因此能够在消遣的同时进行训练。例如即使在用户进行需要在一定时间内对肌肉施加规定的载荷的等长运动的情况下,用户也容易维持集中力。
56.此外,显示部16不需要内置于把持载荷检测器件10。例如,也可以在用户携带的智能手机等信息处理装置上显示图像。该情况下,若用户使用把持载荷检测器件10,则微机17将与传感器15的检测值相关的信息发送到智能手机。智能手机显示把持载荷检测器件10发送的信息。由此,用户能够在智能手机上确认训练状况。该情况下,用户不需要将把持载荷检测器件10拿在面前。
57.此外,把持载荷检测器件10除了显示部16之外,还可以具备扬声器代替显示部16。扬声器发出与检测出的载荷的大小相应的声音。在把持载荷检测器件10除了显示部16之外还具备扬声器的情况下,扬声器也可以发出与图像链接的声音。该情况下,用户更容易引起对显示在显示部16的物体施加力的错觉。另外,扬声器可以根据检测出的载荷的大小发出使音量变化的声音,也可以发出使声音高度变化的声音。在改变声音的高度的情况下,用户能够将把持载荷检测器件10用作一种乐器。例如,用户根据显示在显示部16的指示改变用力的方式,从而能够演奏音乐。用户能够一边使用把持载荷检测器件10一边以游戏感觉进行肌肉力量训练。
58.另外,显示部16也可以根据用户对壳体11的载荷的加减、或者持续时间显示“加油”、“fight!”等文字。例如,微机17将传感器用检测电路18的检测值与存储在微机17的内
置存储器(未图示)中的规定的阈值进行比较。微机17在判断为检测值为规定的阈值以下的情况下,在显示部16显示为“还差一点”。由此,用户能够知道施加在壳体11的载荷不足。相反,微机17在判断为检测值比规定的阈值大的情况下,在显示部16显示为“ok”。用户能够知道施加在壳体11的载荷足够。并且,显示部16也可以显示用户的训练所需的时间。用户能够知道训练所需的时间。这样,把持载荷检测器件10能够辅助用户的训练。
59.把持载荷检测器件10也可以与服务器通信。例如,微机17的通信部将与传感器15的检测值相关的信息向把持载荷检测器件10的提供者管理的服务器发送。把持载荷检测器件10的提供者例如是健身房、或者把持载荷检测器件10的销售公司等。
60.服务器接收与传感器15的检测值相关的信息。服务器对接收到的信息进行解析。例如,服务器根据传感器15的检测值计算用户的训练状态(例如一天的总运动量、或者消耗卡路里)等。健身房的教练观察作为顾客的用户的训练状态,创建建议消息。服务器向把持载荷检测器件10发送教练创建的消息。把持载荷检测器件10从服务器接收消息。也就是说,把持载荷检测器件10接收与发送的信息对应的信息。显示部16显示从服务器接收的消息。用户通过确认所显示的消息,能够接受训练的辅助。这样,把持载荷检测器件10能够通过与外部的服务器等通信来辅助用户的训练。
61.另外,从服务器发送的信息也可以是与用户的训练状态对应的得分等。另外,把持载荷检测器件10的提供者也可以构建根据得分向用户提供某种优惠的系统。用户通过确认得分来促进训练。
62.此外,把持载荷检测器件10也可以是检测生物体震颤的器件。生物体震颤是生理现象,是肌肉的机械式的微小振动。若用户与壳体11接触,则生物体震颤传递到压电膜21。
63.微机17若检测到生物体震颤,则判定为用户与壳体11接触。微机17仅在检测到生物体震颤的状态时计算载荷。因而,微机17能够减少不必要的功率消耗。
64.此外,把持载荷检测器件10例如能够作为降低血压的健康辅助器具使用。对于高血压疾病,已知通过反复进行安静地握住毛巾等轻微的运动,具有降低血压的效果。
65.例如,把持载荷检测器件10在用户向壳体11施加了规定的载荷以上的载荷的情况下,在显示部16显示警告。用户通过观察显示部16,能够知道施加在壳体11的载荷过强、即载荷的过度施加。因此,用户能够知道适当的轻载荷的施加方法,能够进行用于降低血压的运动。
66.接下来,对把持载荷检测器件10的应用例进行说明。图5的(a)是作为把持载荷检测器件10的应用例,对与充电台51的组合进行说明的示意图,图5的(b)是表示在充电台51充电中的把持载荷检测器件10的示意图。
67.如图5的(a)和图5的(b)所示,充电台51形成为大体圆柱状,以便插入把持载荷检测器件10。充电台51具有能够与把持载荷检测器件10连接的销55。把持载荷检测器件10在壳体11的内侧具有未图示的充电销。
68.若将把持载荷检测器件10插入充电台51,则把持载荷检测器件10的充电销与充电台51的销55电连接。此外,把持载荷检测器件10不需要与充电台51直接连接。例如,把持载荷检测器件10也可以通过使用电磁感应的非接触型的充电方式进行充电。
69.如图5的(b)所示,显示部16也可以在把持载荷检测器件10的充电中进行信息的显示。显示部16例如也可以显示该日的用户的训练状态、或者当前的分数等。由此,用户能够
把握训练状态等。
70.另外,显示部16也可以显示与用户的训练状态无关的信息。显示部16能够显示在微机17的通信部接收的信息。显示部16也可以显示用户选择的图像、或者影像等信息。图像或者影像例如显示新闻、广告、用户登记的照片、或者来自训练场等的通知或指示。由此,用户能够将把持载荷检测器件10用作室内装饰、或者监视器。
71.图6的(a)是表示第二实施方式所涉及的把持载荷检测器件20的结构的立体图,图6的(b)是图6的(a)的iii-iii线的剖视图。图6的(a)用虚线且透过的形式表示把持部65。此外,在第二实施方式的说明中,对与第一实施方式同样的构造省略说明。
72.把持载荷检测器件20具备壳体61、以及把持部65。把持部65在壳体61的外周配置于把持区域14。壳体61形成为中央部分与把持区域14相比截面积较小。把持载荷检测器件20的把持区域14形成为用户容易把持的粗细度。由此,用户容易把持把持载荷检测器件20,并且容易施加力。
73.把持部65具备传感器63和保护膜64。传感器63粘贴于壳体61的外周。因此,传感器63容易从壳体61装卸。另外,保护膜64层叠并粘贴于传感器63,以便覆盖传感器63。
74.用户在使用时把持把持部65。传感器63经由保护膜64检测用户施加的载荷。通过用户把持把持部65,传感器63被用户的手遮盖。因此,传感器63和保护膜64也可以不具有透光性。因此,传感器63的材料能够广泛选择。另外,壳体61只要中央部分具有透光性即可,把持区域14也可以不具有透光性。
75.此外,把持部65也可以实施防滑等处理。例如,壳体61可以被直接实施滚花加工。另外,传感器63也可以散布有网球或羽毛球的球拍所使用的手胶来代替保护膜64。由此,用户容易稳定地把持壳体61。
76.最后,本实施方式的说明在所有方面应被认为是例示,并非是对本实用新型进行的限制。本实用新型的范围不是由上述的实施方式表示,而是由权利要求书表示。并且,本实用新型的范围意在包括与权利要求书等同的意思以及在范围内的全部变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1