一种学生防挟持教育训练装置的制作方法
[0001]
本发明涉及学生拓展教育设备领域,具体是一种学生防挟持教育训练装置。
背景技术:
[0002]
学生作为祖国的花朵,祖国的未来,一代学生的发展,直接影响到祖国未来的发展前景,所以如何更好的教育学生至关重要。现代学生一直将学习的重心放置到课堂内的书本学习上,而忽视课外的拓展项目,使得学生的体质得不到锻炼,不能够及时应对一些险情。
[0003]
在学生的生长时期,其身体素质会逐渐增强,但是处于学生时期的孩子们,其身体素质较弱,很容易受到外界的侵害,但是当面对外界侵害时,如何使孩子快速冷静的做出反应,是一个很重要的课程。在现代网络媒体上,学生被挟持绑架的案件层出不穷,而学生在被挟持时无法做出正确的反应,使得挟持人员能够很轻易的控制住被挟持的学生,进而使学生很容易受到迫害。当一些歹徒挟持学生时,因为学生反抗能力较弱,所以其最有效也是最常用的方法是在学生背后束缚住学生的脖颈部位,使得学生既不能喊叫,也能够很好的控制住学生,而这一控制方法对于被控制的学生来说,是十分危险的。大部分学生因为缺少急救经验和措施,当被歹徒束缚住自身的脖颈部位时,不能够冷静的做出反应,进而做出乱动挣扎的行为,而歹徒看到学生的这种行为时,会更加紧固对学生脖颈部位的束缚,使得歹徒更容易对学生造成损伤,而且此时歹徒本身处于紧张状态,无暇顾及有没有伤害到学生,使得学生更容易受到伤害,因此教导学生在遇到此类事件时,如何正确的做出反应,是一个十分重要的问题。对于学生而言,其在发育期间,每个学生的身高体重差距较大,有些学生在出入发育期就到达成人身高,而有些学生发育较慢,其身高体重也相对较低,对于不同身高体重的学生应有不同的反应,使得能够最快的做出反应。当学生在被歹徒束缚住脖颈时,会有一些身体敏感处暴露在学生的打击范围内,所以这就要就学生能够冷静且正确的打击到歹徒的打击点,而在教育训练时,采用学生与学生之间的实验操作十分危险,因为学生不能控制好自己的力量,而且人身体上的打击点相对脆弱,不能控制好力度,会对人体造成较大伤害,不利于人身安全。
[0004]
基于上述问题,需要设计一种学生防挟持教育训练装置,能够实现歹徒束缚学生脖颈部位的教育训练操作,而且在进行演练时,不会对学生造成危险性损伤,且在教育训练时,能够教会学生正确的打击到挟持人的打击点,并且打击点对于不同身高的学生来说,能够适应不同身高的学生,使得不同身高的学生在被挟持时,都能够做出正确的反应,并且能够锻炼学生应对此类危险发生时的反应能力,保障学生能够具备一个良好的生活学习环境。
技术实现要素:
[0005]
本发明的目的在于提供一种学生防挟持教育训练装置,它能够方便的进行歹徒束缚学生脖颈部位的教育训练操作,且在教育训练操作时不会对学生造成损伤,而且对于不
同身高的学生来说,能够适应不同身高的学生进行教育训练操作,并且能够锻炼学生冷静处理此类事件的能力,当学生遇到与此类事件相似的事件时,能够冷静的做出反应。
[0006]
本发明为实现上述目的,通过以下技术方案实现:
[0007]
一种学生防挟持训练装置,包括伸展装置和感应装置;所述伸展装置包括伺服电机、上臂肢体、下臂肢体和肩部肢体;所述肩部肢体的外端面设置有连接腔;所述上臂肢体的里侧端面设有能够与连接腔相配合的旋转腔;所述伺服电机设置在连接腔顶面上的电机盒中;所述连接腔内设有主旋转轴;所述主旋转轴上设有主动齿轮;所述主旋转轴的一端连接有伺服电机的输出轴;所述旋转腔内设有副旋转轴;所述副旋转轴上设有能够与主动齿轮相配合的从动齿轮;所述主旋转轴与副旋转轴之间连接设有旋转连杆;所述下臂肢体设置在上臂肢体的下端;所述感应装置包括断电压力感应器和打击压力感应器;所述断电压力感应器和打击压力感应器均通过集成电路控制板与伺服电机连接;还包括打击圆板和背部肢体;所述断电压力感应器固定设置在上臂肢体靠近外侧端部的里侧;所述打击圆板的板面上设有打击压力感应器;所述背部肢体的上端左右两侧均设有打击压力感应器。
[0008]
所述上臂肢体与下臂肢体之间通过转轴旋转连接;所述转轴上套有扭力弹簧。
[0009]
还包括带动伸展装置移动的调节装置;所述调节装置包括背部肢体、电动推杆和支撑圆盘;所述打击圆板设置在支撑圆盘,所述支撑圆盘的顶面上设有滑轨,所述打击圆板通过丝杠丝母传动机构的带动从而能够沿滑轨滑动调节位置;所述背部肢体的背面中心设有连接柱;所述电动推杆的顶面固定连接在连接柱上;所述电动推杆的底面固定设置在支撑圆盘上;所述背部肢体的底面上设有限位滑孔;所述支撑圆盘上设有能够与限位滑孔相配合的限位滑杆;所述肩部肢体的内端面固定连接在背部肢体的上端侧面上。
[0010]
所述旋转连杆的两端设有旋转通孔;所述主旋转轴和副旋转轴上均设有能够与旋转通孔相配合的限位凹槽,所述旋转连杆能够在限位凹槽内旋转。
[0011]
所述肩部肢体、上臂肢体和下臂肢体上均套有软质仿生套垫;所述软质仿生套垫和肢体之间填充有聚氨酯弹性塑料垫层;所述上臂肢体和下臂肢体的连接部位的软质仿生套垫上设有内陷凹槽。
[0012]
所述背部肢体的支撑面上设有软质仿生支撑护垫。
[0013]
对比现有技术,本发明的有益效果在于:
[0014]
本装置适用于学生的防挟持教育训练操作,相比于人与人之间的实体操作,此装置能够避免实体操作对挟持者造成的伤害,能够实现学生的无害防挟持教育训练。本装置设置有伸展装置,能够很方便的实现对学生的脖颈部位进行挟持教育训练,且在挟持时,不会出现对学生脖颈部位造成伤害的问题。本装置还设有调节装置,能够根据不同学生的身高来调节伸展装置的位置,使得装置能够适应不同身高的学生;当学生受到伸展装置的挟持时,需要学生正确打击到感应装置,进而锻炼学生能够正确打击到打击点,且培养学生能够冷静的做出反应,进而锻炼学生在正确做出反应的同时,培养学生的遇到紧急事件的冷静能力。
附图说明
[0015]
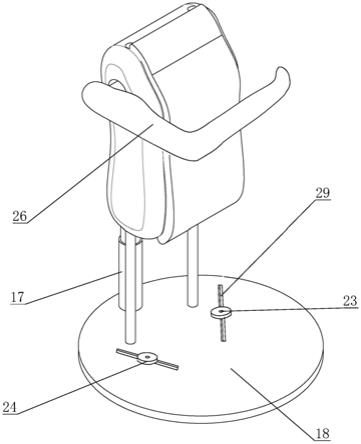
附图1是本发明整体结构简图。
[0016]
附图2是本发明内部结构简图。
[0017]
附图3是本发明局部结构示意图。
[0018]
附图4是本发明伸展装置挟持状态图。
[0019]
附图5是本发明伸展装置伸展状态图。
[0020]
附图6是本发明局部结构示意图。
[0021]
附图中所示标号:
[0022]
1、伺服电机;2、上臂肢体;3、下臂肢体;4、肩部肢体;5、连接腔;6、旋转腔;7、主旋转轴;8、主动齿轮;9、副旋转轴;10、从动齿轮;11、旋转连杆;12、转轴;13、扭力弹簧;14、旋转通孔;15、限位凹槽;16、背部肢体;17、电动推杆;18、支撑圆盘;19、连接柱;20、限位滑孔;21、限位滑杆;22、断电压力感应器;23、打击压力感应器;24、打击圆板;25、软质仿生套垫;26、软质仿生支撑护垫;27、聚氨酯弹性塑料垫层;28、内陷凹槽;29、滑轨。
具体实施方式
[0023]
下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所限定的范围。
[0024]
本发明所述是一种学生防挟持教育训练装置,主体结构包括伸展装置;
[0025]
伸展装置:
[0026]
伸展装置包括伺服电机1、上臂肢体2、下臂肢体3和肩部肢体4;伸展装置采用伺服电机1作为驱动装置的目的是为了,伺服电机1可以通过脉冲信号准确控制转速和转动角度,将脉冲信号转化为转动角度和转速以驱动控制对象,当学生进行防挟持教育训练操作时,伺服电机1可以根据脉冲信号,来决定伸展装置的旋转角度,使得学生在进行防挟持教育训练操作时,能够更加的安全。肩部肢体4的外端面设置有连接腔5,上臂肢体2的里侧端面设有能够与连接腔5相配合的旋转腔6,伺服电机1设置在连接腔5顶面上的电机盒中;设置的连接腔5和旋转腔6能够方便旋转,使得本装置在进行收缩时,能够实现上臂肢体2相对与肩部肢体4发生转动,使得本装置能够更方便的进行收缩,而且歹徒在挟持学生脖颈部位时,即上臂相对于肩部的倾斜角度会小于55度,且夹角小于55度会对人体的颈部造成影响,而上臂与肩部之间的角度小于70度时,就会使人的颈部产生压迫感;设置的旋转腔6在带动上臂肢体2旋转角度接近55度时,旋转腔6的内旋转面会触碰到连接腔5的内壁,使得旋转腔6不再相对连接腔5发生旋转,进而保障上臂肢体2与肩部肢体4之间的夹角最小为55度,保障上臂肢体2旋转到极限位置时,也不会对学生的脖颈部位造成损伤。连接腔5内设有主旋转轴7,主旋转轴7上设有主动齿轮8,主旋转轴7的一端连接有伺服电机1的输出轴,旋转腔6内设有副旋转轴9,副旋转轴9上设有能够与主动齿轮8相配合的从动齿轮10,主旋转轴7与副旋转轴9之间连接设有旋转连杆11;伸展装置采用齿轮连接的目的是为了,齿轮传动的传动精度高,当伺服电机1带动主动齿轮8旋转时,主动齿轮8能够准确的将伺服电机1的旋转角度根据主动齿轮8与从动齿轮10的传动比传递到从动齿轮10上,使得上臂肢体2相对于肩部肢体4发生旋转时,精确上臂肢体2的旋转角度,使得学生在进行教育训练操作时,不会因为上臂肢体2的转动角度过大,使得学生的脖颈部位受到伤害。上臂肢体2与下臂肢体3之间通过转轴12旋转连接,转轴12上套有扭力弹簧13;设置转轴12的目的是为了,在实现上臂肢体2与下臂肢体3连接的同时,能够方便上臂肢体2与下部肢体之间的转动。在歹徒挟持人体
颈部时,其上臂肢体2与下臂肢体3之间的夹角小于30度时,会对人体的颈部造成形象,而上臂肢体2与下臂肢体3之间的角度小于45度时,会对人体颈部产生压迫感,而如说明书附图图4所示,为本装置无外力的情况下上臂肢体2与下臂肢体3之间的夹持角度,且此夹持角度大于30度,使得被挟持的学生在使用本装置时,不会因为上臂肢体2与下臂肢体3之间的角度问题而对学生的脖颈部位造成影响。设置扭力弹簧13的目的是为了,现代校园中,校园暴力时有发生,当学生被同等学生在背后挟持住颈部时,打击伤害点位会对同龄学生造成很大的危害,并且有些动作学生在进行时不会考虑后果,因此很容易造成很严重的后果,对于此类情况,学生应先用力将所挟持的手臂推开,而扭力弹簧13能够限制上臂肢体2与下臂肢体3之间的移动范围,当学生有能力推开被挟持手臂时,即可采用这种方法,当学生向外推动下臂肢体3时,扭力弹簧13会阻碍下臂肢体3相对于上臂肢体2旋转,使得本装置模拟出挟持效果,如说明书附图图4所示,箭头a的方向为下臂肢体3相对于上臂肢体2的旋转方向,而当学生无法推开扭力弹簧13进行挣脱时,再采取打击措施,其最终目的也是为了保障自身安全,并且能够锻炼学生在应对不同挟持情况下,能够做出正确的反应。旋转连杆11的两端设有旋转通孔14,主旋转轴7和副旋转轴9上均设有能够与旋转通孔14相配合的限位凹槽15,旋转连杆11能够在限位凹槽15内旋转;设置的旋转连杆11的目的是为了使肩部肢体4和上臂肢体2之间能够实现连接转动,且在连接转动的同时不会因为旋转连杆11的设置而对上臂肢体2相对于肩部肢体4造成影响,保障伸展装置能够更好的具备收缩紧固效果。
[0027]
调节装置:
[0028]
包括带动伸展装置移动的调节装置;设置调节装置的目的是为了保障,因为每个学生的身高不同,所以装置所满足的学生要不相同,所以通过调节装置来改变伸展装置的不同高度,进而满足不同身高的学生都能够进行防挟持教育训练。调节装置包括背部肢体16、电动推杆17和支撑圆盘18;背部肢体16的背面中心设有连接柱19,电动推杆17的顶面固定连接在连接柱19上,电动推杆17的底面固定设置在支撑圆盘18上;本装置采用电动推杆17作为调节装置的驱动装置,其目的是为了,当需要调节伸展装置到不同的高度时,电动推杆17能够带动伸展装置到达不同高度,而且电动推杆17能够保障在调节伸展装置高度时,能够快速的将伸展装置调节到指定高度,保障调节装置的实用性。背部肢体16的底面上设有限位滑孔20,支撑圆盘18上设有能够与限位滑孔20相配合的限位滑杆21,肩部肢体4的内端面固定连接在背部肢体16的上端侧面上;设置限位滑孔20和限位滑杆21的目的是为了,当电动推杆17带动伸展装置上移时,会发生背部肢体16左右滑动的问题,而设置的限位滑动和限位滑杆21能够在电动推杆17带动伸展装置上移时,起到限位的作用,避免伸展装置在上升时发生左右晃动的问题,使得电动推杆17能够更好的带动伸展装置上下移动。
[0029]
感应装置:
[0030]
感应装置设置在伸展装置和调节装置上;设置感应装置的目的是为了,能够让学生在使用本装置进行防挟持教育训练操作时,有效的教习学生能够正确的打击到本装置上的感应装置,而当学生正确打击到在本装置上设置的感应装置时,伸展装置上的伺服电机1停止转动,进而不再对学生的脖颈部位收缩,即为学生教育训练有效。而且在训练时,伺服电机1会慢慢收缩,使得学生的脖颈部位感到压迫,但学生感到压迫感时,学生肯定会有紧张的感觉,所以这就要求学生能够冷静且正确的打击到本装置上设置的感应装置,培养学生冷静处于应急事件的能力,如说明书附图图5所示,为伺服电机1驱动上臂肢体2打开的结
构示意图。感应装置包括断电压力感应器22和打击压力感应器23,断电压力感应器22固定设置在上臂肢体2靠近外侧端部的里侧;断电压力感应器22作为一个保险的保护措施,将其设置到上臂肢体2靠近外侧端部的里侧,在伺服电机1带动上臂肢体2旋转移动时,断电压力感应器22能够感应到上臂肢体2对学生脖颈部位的压力,使得上臂肢体2在对学生脖颈部位进行压迫时,能够确保之间的压力在安全范围内,当数值到达极限数值时,断电压力感应器22传输电信号给伺服电机1,使伺服电机1反转,使上臂肢体2松开。因此上臂肢体2和肩部肢体4之间的位置关系和断电压力感应器22的设置,能够保障学生在使用本装置进行教育训练时,不会对学生的本身造成损伤,即在生理学角度上保障学生安全也在压力的直观数值上保障学生安全。支撑圆盘18上设有打击圆板24,打击圆板24的板面上设有打击压力感应器23,背部肢体16的上端左右两侧均设有打击压力感应器23;在生理学上,人体胸腔内所处的器官及其重要,当人体胸腔两侧受到外力的打击时,人体会快速感应并作出蜷缩反应,使得挟持者在受到胸腔打击时,其身体会不自觉的做出蜷缩反应,使得挟持者的手臂放松,便于被挟持者的逃脱;生理学上,人体脚面上的神经组织较多,当人体脚面受到外界打击时,多个神经信号发送至大脑,使得挟持者做出保护脚部的动作,进而使得被挟持者逃脱,以上两个打击点在受到打击时做出的反应均为非条件反射,会使挟持者不受控制的将挟持手臂放松,便于被挟持者逃脱,所以以上设置的打击压力感应器23的设置位置为有效打击位置,并且打击感应传感器在受到打击信号后,即将电信号传递给伺服电机1,使得伺服电机1反转,解除上臂肢体2对学生脖颈部位的压迫,且当学生在打击打击圆板24时,不会真如脚部的肢体一样踩踏,因为如果学生进行打击操作时,没有正确打击到位置,就可能出现崴脚的危险,而设置的打击圆板24在踩踏时,能够保障学生不会因为踩踏位置不正确的原因,而导致学生崴脚的问题。支撑圆盘18的顶面上设有滑轨29,打击圆板24能够通过丝杠丝母传动机构的带动从而沿滑轨29滑动调节位置,这样设置的目的是为了,当学生进行防挟持训练时,通过遥控调节给丝杠丝母传动机构提供动力的电机来调节打击圆盘24的位置,来培养学生冷静寻找打击点的能力,并且能够通过调节打击圆板24的位置,来适应不同体型的学生进行防挟持训练教育。
[0031]
保护装置:
[0032]
肩部肢体4、上臂肢体2和下臂肢体3上均套有软质仿生套垫25;软质仿生套垫25的设置是为了保障,当上臂肢体2和下臂肢体3对学生脖颈部位造成压迫时,软质仿生套垫25能够起到保护的作用,不会使学生的脖颈部位因为伸展装置的硬质结构而造成损伤,并且软质仿生套垫25能够最好的模拟出学生在被挟持时的压迫感,进而使本装置挟持教育训练效果更好。软质仿生套垫25和肢体之间填充有聚氨酯弹性塑料垫层27,这样设置的目的是为了,聚氨酯为软质合成树脂材料,能够更好的保护学生在进行防挟持教育训练时,不会因为材料结构过硬对学生脖颈部位有所影响。上臂肢体2和下臂肢体3的连接部位的软质仿生套垫25上设有内陷凹槽28;因为人体的喉咙部位相对脆弱,所以内陷凹槽28能够适应学生的咽喉部位,不会使学生的咽喉部位造成伤害,使得学生的脖颈部位能够进一步的得到保护。背部肢体16的支撑面上设有软质仿生支撑护垫26;设置软质仿生支撑护垫26的目的是为了,当本装置模拟挟持时,学生的背部会贴到背部肢体16上,而软质仿生支撑护垫26能够支撑保护学生背部的作用,避免学生背部受到伤害。
[0033]
使用方法:
[0034]
学生准备好后,竖直站立在支撑圆盘18上,启动电动推杆17,使电动推杆17带动背部肢体16上下移动,当伸展装置调整到合适位置时,停止调节,使学生背部贴靠到背部肢体16的软质仿生支撑护垫26上,即开始防挟持教育训练操作。
[0035]
启动伺服电机1,使与伺服电机1主旋转轴7旋转,进而带动主动齿轮8转动,主动齿轮8转动带动从动齿轮10转动,使得上臂肢体2相对于肩部肢体4发生旋转,此时因为上臂肢体2与下臂肢体3之间一直有扭力弹簧13限制其角度,所以只需伺服电机1转动,接触到学生脖颈部位后,即可对学生的脖颈部位造成压迫。当学生感到脖颈部位有压迫感时,首先尝试用手臂将相比推开,即克服扭力弹簧13的弹力推动下臂肢体3相对于上臂肢体2发生转动,如推开,即逃脱成功;如无法推开,即进行下述操作。
[0036]
无法将下臂肢体3推开后,学生此时应冷静的做出反应,因为在现实生活中,如果不能正确打击到挟持者的打击位置,挟持者很可能实施报复性措施。因此,学生在感到脖颈部位的压迫后,快速感受到挟持者的打击点,即快速寻找本装置上的打击压力感应器23,并且用力打击,当打击压力感应器23感受到有效打击时,将电信号传送给伺服电机1,使伺服电机1反转,即防挟持教育训练成功;如果不能正确打击到打击压力感应器23,即打击失败,停止操作,进行多次防挟持教育训练操作。
[0037]
当学生在进行防挟持教育训练时,没有对打击压力感应器23实施打击,伺服电机1会一直收缩,当断电压力感应器22到达极限数值时或者上臂肢体2到达旋转的极限位置时,伺服电机1停止旋转,并反转,即学生防挟持教育训练失败,需多次进行练习,直至掌握防挟持教育训练的基本操作。
[0038]
基于上述问题,需要设计一种学生防挟持教育训练装置,能够实现歹徒束缚学生脖颈部位的教育训练操作,而且在进行演练时,不会对学生造成危险性损伤,且在教育训练时,能够教会学生正确的打击到挟持人的打击点,并且打击点对于不同身高的学生来说,能够适应不同身高的学生,使得不同身高的学生在被挟持时,都能够做出正确的反应,并且能够锻炼学生应对此类危险发生时的反应能力,保障学生能够具备一个良好的生活学习环境。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1