一种基于双机械臂平台的击发球一体化乒乓球机器人
1.本发明涉及机器人技术领域,尤其涉及一种基于双机械臂平台的击发球一体化乒乓球机器人。
背景技术:
2.现有的乒乓球机器人技术主要有以下几种形式:
3.1、将一个串联机械臂倒挂固定于乒乓球桌的上面,该串联机械臂的末端连接有乒乓球拍(新松机器人)。
4.2、六自由度串联机器人,其第一个自由度是沿着乒乓球桌的宽度方向做直线平移运动(新松机器人)。
5.3、将一个五自由度并联机械臂倒挂固定在乒乓球桌上方,该并联机械臂的末端连接有球拍(omron)
6.4、工业机械手臂(kuka)
7.5、将一个五/六自由度串连机械臂固定于乒乓球台横侧的导轨式乒乓球机器人;
8.6、将一个五/六自由度串连机械臂固定于全向麦克纳姆轮平台的乒乓球机器人;
9.固定在球桌上方机械臂的乒乓球机器人,由于其运动范围非常有限,很难处理落点靠近球桌边缘的乒乓球;底座固定的乒乓球机器人,只能击打靠近球桌中线的乒乓球,且价格昂贵;固定于乒乓球台横侧的导轨式乒乓球机器人,可以击打球横侧范围内外的乒乓球,虽然较小的提高了乒乓球机器人的击打范围,但是球桌两侧范围的乒乓球还不能有效击打,击打范围相对来说还是有待提升;基于全向麦克纳姆轮平台的乒乓球机器人,控制平移的过程不稳定。
技术实现要素:
10.本发明的目的在于提出一种移动稳定,乒乓球定位精准,且击打范围广的乒乓球机器人。
11.为达到上述目的,本发明提出一种基于双机械臂平台的击发球一体化乒乓球机器人,包括乒乓球桌、视觉定位系统、击球装置、发球装置和中央控制系统;
12.所述乒乓球桌的半台预设有导轨,所述击球装置通过所述导轨设于所述乒乓球桌的桌面上;所述发球装置与所述击球装置相配合实现发球;所述视觉定位系统设于所述乒乓球桌上方,用于观测乒乓球路径;所述中央控制系统与所述视觉定位系统、击球装置和所述发球装置实现信号连接。
13.进一步的,所述击球装置包括六自由度机械臂和乒乓球拍;所述六自由度机械臂一端与所述导轨活动连接,另一端握持有所述乒乓球拍。
14.进一步的,所述导轨的数量为两条,两条所述导轨沿所述乒乓球桌两侧的侧沿布置,每一条所述导轨上均活动连接有所述六自由度机械臂,使得所述六自由度机械臂实现沿所述导轨方向的位移;两条所述六自由度机械臂分别负责乒乓球半台左右两边的击球。
15.进一步的,所述发球装置包括一个储球箱、传输管道、供球装置,所述储球箱内预设有乒乓球,所述传输管道的进料端置于所述储球箱内,所述传输管道的出料端置于乒乓球桌上方,所述供球装置设于所述储球箱内,位于所述传输管道的入料口。
16.进一步的,所述视觉定位系统为双目视觉定位系统,所述双目视觉定位系统包括两台摄像机,两台所述摄像机通过导杆与两条所述导轨一一对应连接,导杆与所述导轨延伸出所述台面的一端垂直连接。
17.与现有技术相比,本发明的优势之处在于:本发明的基于双机械臂平台的击发球一体化乒乓球机器人利用视觉定位系统采集乒乓球数据,中央控制系统实时分析乒乓球的路径,对于乒乓球实现精准定位,再操作六自由度机械臂实现对乒乓球多角度的击打;配合上发球装置,进一步实现了击发球一体化智能机器人。
18.本发明的机械臂与导轨均设置两个,位于乒乓球桌的左右两侧,分别负责乒乓球桌左右半边范围的击球,同时机械臂也可延伸至桌面外,实现大范围全覆盖的击球,死角更少。
19.本发明的视觉定位系统为双目视觉定位系统,与视觉上位机信号连接,实现了模拟人眼双目的视觉效果,监测范围更广,对乒乓球的定位更加的精准。
20.本发明的发球装置与击球装置配合,实现了击发球一体化,在应用于实际训练过程中,训练模式更多样,可培养运动员接各种发球的能力。
附图说明
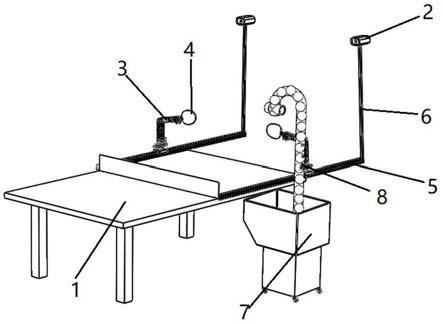
21.图1为本发明实施例中基于双机械臂平台的击发球一体化乒乓球机器人整体结构示意图;
22.图2为本发明实施例中基于双机械臂平台的击发球一体化乒乓球机器人的正面图。
具体实施方式
23.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案作进一步地说明。
24.如图1和图2所示,本发明提出一种基于双机械臂平台的击发球一体化乒乓球机器人,包括乒乓球桌1、视觉定位系统2、击球装置、发球装置和中央控制系统;
25.乒乓球桌1的半台预设有导轨5,击球装置通过导轨5设于乒乓球桌1的桌面上;发球装置与击球装置相配合实现发球;视觉定位系统2设于乒乓球桌1上方,用于观测乒乓球路径;中央控制系统与视觉定位系统2、击球装置和发球装置实现信号连接。
26.在本实施例中,击球装置包括六自由度机械臂3和乒乓球拍4;六自由度机械臂3一端与导轨5活动连接,另一端握持有乒乓球拍4。
27.在本实施例中,导轨5的数量为两条,两条导轨5沿乒乓球桌1两侧的侧沿布置,每一条导轨5上均活动连接有六自由度机械臂3,使得六自由度机械臂3实现沿导轨5方向的位移;两条六自由度机械臂3分别负责乒乓球半台左右两边的击球,分别负责各自四分之一球台范围及乒乓球台外50cm外侧范围乒乓球的击打。
28.在本实施例中,发球装置包括一个储球箱7、传输管道8、供球装置,储球箱内预设
有乒乓球,传输管道的进料端置于储球箱内,传输管道的出料端置于乒乓球桌上方,供球装置设于储球箱内,位于传输管道的入料口,当供球装置接通电源工作后,内部叶轮开始搅拌,将乒乓球输送至传输管道内,一个堆叠一个乒乓球,直至乒乓球从传输管道的出料端送出,随后机械臂控制乒乓拍将球击出。
29.在本实施例中,视觉定位系统2为双目视觉定位系统2,双目视觉定位系统2包括两台摄像机,两台摄像机通过导杆6与两条导轨5一一对应连接,导杆6与导轨5延伸出台面的一端垂直连接。
30.在本实施例中,本发明的工作原理为:发球装置的通过传动装置8释放乒乓球,双目视觉定位系统2实时采集乒乓球的运动数据反馈给中央控制系统的视觉处理上位机,中央控制系统对运动数据进行分析后,得到乒乓球的实时动态坐标;本发明所涉及的乒乓球机器人共设置了三种发球方式,其一:当乒乓球由传动装置8释放后,由距离乒乓球位置较近的机械臂3直接将球击打至对面球桌实现发球;其二:乒乓球由传动装置8释放后自由落体至桌面弹起后由距离较近的机械臂3将球击打至对面球桌实现发球。其三:乒乓球由传动装置8释放后由距离较近的机械臂3击打至另一个机械臂3,由另一机械臂3将球击打至对面球桌实现发球。
31.当乒乓球被击回后,双目视觉定位系统2再次实时采集乒乓球的运动数据反馈给中央控制系统的视觉处理上位机,中央控制系统对运动数据进行分析后,得到乒乓球的实时动态坐标;根据乒乓球的实时动态坐标预测乒乓球的轨迹;通过预测的乒乓球轨迹,计算击球点坐标;根据击球点坐标,输出导轨5运动控制指令,用以控制机械臂沿导轨5运动到指定位置,再利用机械控制下位机对机械臂的角度进行控制,将球击打回去。
32.上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1