智能握力辅助手套导向器的制作方法
1.本实用新型属于医疗器械领域,尤其是涉及一种智能握力辅助手套导向器。
背景技术:
2.智能握力辅助手套通常用于辅助增强人手在抓握运动中能够施加到物体能够的肌肉力量。适用于肌肉衰弱的老年人、关节炎重症患者、脑损伤后康复的人,及其他手部力量需要提高的患者。
3.申请号:200780032202.2公开了一种手指手套,用于加强包裹在所述手套中的人手的抓握运动,其中所述手套具有手掌、手套手指、轭状物、力检测传感器以及控制单元,所述手套手指在每一面上包含人工肌腱,所述人工肌腱沿着所述手套的内部延伸,所述轭状物被安装在所述手套手指的指尖上,以便围绕着被包裹的手指的指尖,人工肌腱在所述手套手指的每一面上被连接到所述轭状物,所述力检测传感器适于检测包裹在所述手套手指中的手指与接触面之间的力,所述力被施加到所述手指,用于手套手指的人工肌腱被连接到至少一个致动器,所述控制单元促使所述致动器依据由所述力检测传感器测得的力,向所述手套手指的人工肌腱上施加拉力,因而促使包裹在所述手套手指中的手指弯曲。
4.申请号:201510694178.5公开了一种可穿戴式助力装置,具体而言,涉及一种能为穿戴者提供辅助拉力的助拉手套,由以下部分组成:一个弹性握部;一个掌固定部;一个连接部,一端与掌固定部连接,另一端连接着缠绕带;助拉手套的缠绕带缠绕在使用人的腕部和前臂前端,分散手部所受的拉力;弹性握部勾住需要拉的物体,分散使用人手指所受的拉力。
5.现有技术的导向器不能及时检测到手掌松开,从而放松对人工肌腱的拉紧,使人工肌腱通过手指的松开而放松。
技术实现要素:
6.本实用新型的目的是提供一种结构简单、能够检测到手指松开的智能握力辅助手套导向器。
7.本实用新型的技术方案是:
8.智能握力辅助手套导向器,包括导向器主体和与导向器主体相配合的上盖,导向器主体为一平面,导向器主体的前端设有三个垂直于导向器主体的轴承,导向器主体的中部设有固定架,固定架的前端间隔设有三个掌心传感器,掌心传感器的测力点位于掌心传感器的前端侧面,人工肌腱穿过固定架与导向器主体之间的间隙后与测力点相接触,然后绕过轴承后与手套指尖相连。
9.掌心传感器用于测力人工肌腱与测力点之间的压力,当手掌打开时,人工肌腱与测力点之间的压力消失,这时掌心传感器可以将信号传递给传动装置,传动装置的电机倒转,放松对人工肌腱的拉紧,手指松开,可实现手套的自由松开与握紧,锻炼效果好。
10.所述掌心传感器包括长条形的传感器主体,传感器主体的前端垂直设有长条形的
测力部分,测力部分的一端与传感器主体侧壁垂直相连,测力部分的另一端端壁为测力点。
11.长条形的传感器主体插入到固定架内部,测力点与传感器主体的侧面不在同一个平面上,对人工肌腱起到了拉紧作用,增大了测力点与人工肌腱之间的压力,使压力检测更加灵敏。
12.测力部分的另一端端壁为弧形壁。
13.弧形壁增大了测力点与人工肌腱的接触面积,进一步增强了压力检测的灵敏程度。
14.测力部分一侧的侧壁与传感器主体的端部相齐平,测力部分另一侧侧壁的长度大于测力部分一侧侧壁的长度。
15.这样将压力集中到弧形壁的一侧,在手指松开时,人工肌腱能够及时与测力点分开,使人工肌腱与测力点之间的压力为零。
16.测力点与轴承之间的连线和轴承与手套指尖连线之间夹角为钝角。
17.测力点与轴承之间的连线和轴承与手套指尖连线之间夹角大于120
°
。
18.轴承位置的设置,使经过测力点的人工肌腱经过一个钝角后与手套指尖相连接,这样方便掌心传感器测量测力点与人工肌腱之间的压力,还能够减小人工肌腱与轴承之间的摩擦。
19.所述导向器主体为脚掌形,与拇指之间相连的轴承位于导向器主体中部一侧,与中指指尖相连的轴承位于导向器主体前端一侧,与无名指之间相连的轴承位于导向器主体前端另一侧。
20.所述上盖设有固定架腔和轴承腔,固定架腔与固定架相配合,轴承腔与轴承相配合。
21.所述上盖设有上安装孔,所述导向器主体设有下安装孔,上安装孔与下安装孔之间螺栓连接。
22.上安装孔和下安装孔的设置需要避开走线,防止螺栓影响到人工肌腱的收缩与放松。
23.本实用新型具有的优点和积极效果是:由于采用上述技术方案,智能握力辅助手套的握紧放松更加轻松方便,智能握力辅助手套通过导向器可以轻松的感应到人手的动作,从而配合人工肌腱的收紧和放松;具有结构简单,加工成本低等优点。
附图说明
24.图1是本实用新型智能握力辅助手套导向器的俯视图
25.图2是本实用新型智能握力辅助手套导向器的立体结构示意图
26.图3是本实用新型智能握力辅助手套导向器的爆炸图
27.图4是本实用新型智能握力辅助手套导向器上壳体的内壁结构示意图
28.图5是本实用新型智能握力辅助手套导向器掌心传感器俯视图
29.图中:
30.1、上盖 2、导向器主体 3、人工肌腱 11、上安装孔 12、固定架腔 13、轴承腔 21、下安装孔 22、固定架 23、掌心传感器 24、轴承 231、测力点 232、传感器主体 233、测力部分
具体实施方式
31.如图1
‑
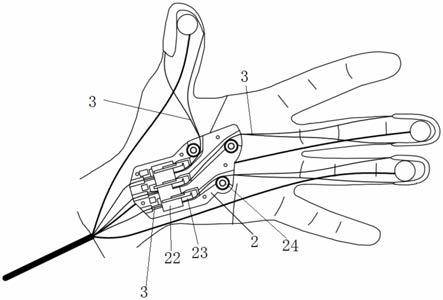
4所示,本实用新型智能握力辅助手套导向器,包括导向器主体2和与导向器主体2相配合的上盖1,导向器主体2为一平面,导向器主体2的前端设有三个垂直于导向器主体2的轴承24,导向器主体2的中部设有固定架22,固定架22的前端间隔设有三个掌心传感器23,掌心传感器23的测力点231位于掌心传感器23的前端侧面,人工肌腱3穿过固定架22与导向器主体2之间的间隙后与测力点231相接触,然后绕过轴承24后与手套指尖相连。
32.如图5所示,掌心传感器23包括长条形的传感器主体232,传感器主体232的前端垂直设有长条形的测力部分233,测力部分233的一端与传感器主体232侧壁垂直相连,测力部分233的另一端端壁为测力点231。
33.长条形的传感器主体232插入到固定架22内部,测力点231与传感器主体232的侧面不在同一个平面上,对人工肌腱3起到了拉紧作用,增大了测力点231与人工肌腱3之间的压力,使压力检测更加灵敏。
34.测力部分233的另一端端壁为弧形壁,也就是测力点231所在平面为弧形平面。弧形平面增大了测力点231与人工肌腱3的接触面积,进一步增强了压力检测的灵敏程度。
35.测力部分233一侧的侧壁与传感器主体232的端部相齐平,测力部分233另一侧侧壁的长度大于测力部分233一侧侧壁的长度。
36.这样将压力集中到弧形壁的一侧,在手指松开时,人工肌腱3能够及时与测力点231分开,使人工肌腱2与测力点231之间的压力为零。
37.测力点231与轴承24之间的连线和轴承24与手套指尖连线之间夹角为钝角。
38.测力点231与轴承24之间的连线和轴承24与手套指尖连线之间夹角大于120
°
。
39.轴承24位置的设置,使经过测力点231的人工肌腱3经过一个钝角后与手套指尖相连接,这样方便掌心传感器23测量测力点231与人工肌腱3之间的压力,还能够减小人工肌腱3与轴承24之间的摩擦。
40.导向器主体2为脚掌形,与拇指之间相连的轴承位于导向器主体2中部一侧,与中指指尖相连的轴承位于导向器主体2前端一侧,与无名指之间相连的轴承位于导向器主体2前端另一侧。脚掌形的导向器主体2符合人体工程学设计,导向器主体2上各个轴承24的位置也符合人体工程学设计,人工肌腱3收缩和放松所需要的拉力小,掌心感应器23感应灵敏。
41.如图4所示,上盖1设有固定架腔12和轴承腔13,固定架腔12与固定架22相配合,轴承腔13与轴承24相配合。在上盖1设有上安装孔11,在导向器主体2设有下安装孔21,上安装孔11与下安装孔21之间螺栓连接。上安装孔11和下安装孔21的设置需要避开走线,防止螺栓影响到人工肌腱3的收缩与放松。
42.本实例的工作过程:掌心传感器23用于测力人工肌腱3与测力点231之间的压力,当手掌打开时,人工肌腱3与测力点231之间的压力消失,这时掌心传感器23可以将信号传递给传动装置,传动装置的电机倒转,放松对人工肌腱3的拉紧,手指松开,可实现手套的自由松开与握紧,锻炼效果好。
43.以上对本实用新型的一个实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作
的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1