一种拾球机器人的制作方法
[0001]
本实用新型涉及机器人技术领域,具体涉及一种拾球机器人。
背景技术:
[0002]
球类作为一门优美却又激烈的运动,受到了来自全球各地人群的喜爱。在进行球类运动时,若是球脱离控制,尤其是对新人玩家而言,捡球都显得非常繁琐、令人疲劳但又无可奈何,特别是像网球、乒乓球等体积较小,训练时需要使用数量多的球类。
[0003]
专利申请号为cn201820308664.8的中国实用新型专利,公开了智能网球拾取机器人及其控制系统,智能网球拾取机器人,包括有机体,所述机体上设置有用于机体行驶的驱动装置、控制机体行驶的控制装置以及用于收集网球的收集装置,所述收集装置包括有滚动设置在机体上的滚筒,所述滚筒的轴线方向水平设置且所述滚筒的侧面与地面抵接;所述滚筒呈中空设置有用于存放网球的容纳腔,所述滚筒的侧壁设置有若干沿滚筒周向均匀分布的支撑杆,相邻支撑杆之间形成有与容纳腔相连通的拾取通道,相邻所述支撑杆之间的距离小于网球的直径在0.1mm~1mm之间。通过滚动设置在机体上的滚筒实现机体行驶轨迹上网球的快速拾取,使智能网球拾取机器人在行进间完成网球的拾取,使网球的拾取变得简单。
[0004]
但上述专利的缺点在于,不能实时获得机器人的运行情况,当发生故障时工作人员不能及时采取措施。
技术实现要素:
[0005]
本实用新型的目的在于克服现有技术中的缺点,提供一种拾球机器人,结合数据采集模块和无线传输模块将采集的机器人运行数据传输至服务器,可实时监测机器人的运行情况。
[0006]
本实用新型的目的是通过以下技术方案来实现的:一种拾球机器人,包括机体,所述机体上设置有用于收集球的收集装置、用于控制机体行驶的控制装置、驱动机体行驶的驱动装置,所述控制装置包括无线传输模块、控制模块、数据采集模块,所述控制模块与所述无线传输模块相互连接,所述无线传输模块与所述数据采集模块相互连接,所述数据采集模块用于采集所述机体的位置信息,所述无线传输模块用于将所述数据采集模块采集的位置信息发送至服务器。
[0007]
本实用新型的有益效果是,通过控制机器人行驶,收集装置拾取网球,位置信息包括机器人旋转的角度、行驶的加速度,在行驶的过程中数据采集模块采集机器人旋转的角度、行驶的加速度通过无线传输模块传输至服务器或上位机,可实时监测机器人的运行情况。
[0008]
进一步,所述无线传输模块为wifi、zigbee、蓝牙、uwb、nfc中的一种或多种。
[0009]
采用上述进一步方案的有益效果是,使用无线传输模块综合成本低,性能更稳定,组网灵活,可扩展性好,即插即用。管理人员可以迅速将新的无线监控点加入到现有网络
中,不需要为新建传输铺设网络、增加设备,轻而易举地实现远程无线监控。
[0010]
进一步,所述无线传输模块包括型号为cc-debugger的调试器、型号为 cc2530f256rhat的主控单元、以及滤波电路,所述调试器与所述主控单元电连接,所述主控单元的第二十二引脚与第二十三引脚之间设置有第二晶振,所述主控单元的输出端与所述滤波电路的输入端连接,所述滤波电路的输出端连接有天线接口,所述主控单元还与所述数据采集模块电连接。
[0011]
采用上述进一步方案的有益效果是,通过调试器下载程序到主控单元,主控单元根据指令将信息传输至滤波电路,滤波电路对杂波滤出后通过天线将信息传输至服务器。
[0012]
进一步,所述滤波电路为nc滤波电路。
[0013]
采用上述进一步方案的有益效果是,设置nc滤波电路滤除杂波,减少干扰,增强电路稳定性。
[0014]
进一步,所述滤波电路为lc滤波电路。
[0015]
采用上述进一步方案的有益效果是,设置lc滤波电路滤除杂波,减少干扰,增强电路稳定性。进一步,所述数据采集模块包括型号为mpu6065的传感器,所述传感器的第二十三引脚和第二十四引脚分别与所述无线传输模块电连接。
[0016]
采用上述进一步方案的有益效果是,集成了3轴mems陀螺仪,3轴mems加速度计,可输出九轴的信号,将采集的加速度和运动幅度欧无线传输模块传输至服务器。
[0017]
进一步,还包括驱动模块,所述驱动模块包括型号为l298的驱动芯片,所述驱动芯片的第五引脚、第七引脚、第十引脚、第十二引脚分别与所述控制模块电连接,所述驱动芯片的第二引脚、第三引脚、第十三引脚、第十四引脚分别与电机电连接。
[0018]
采用上述进一步方案的有益效果是,使用l298芯片是h桥集成芯片,输出电流大,可用来驱动直流电动机和步进电动机,控制电机的正反转,驱动机器人行驶。
[0019]
进一步,所述控制模块具体为stc89c52芯片。
[0020]
采用上述进一步方案的有益效果是,stc89c52rc低功耗、高性能cmos8位微控制器,具有8k字节系统可编程flash存储器,拥有灵巧的8位cpu和在系统可编程flash。
[0021]
进一步,还包括第八二极管、第四二极管、第七二极管、第三二极管、第六二极管、第二二极管、第五二极管、第一二极管,
[0022]
所述第八二极管与所述第四二极管串联,所述第八二极管的阴极与所述第四二极管的阳极连接,所述第八二极管的阳极接地,所述第四二极管的阴极接电源,所述第八二极管和所述第四二极管的连接处与所述驱动芯片的第二引脚连接;
[0023]
所述第七二极管与所述第三二极管串联,所述第七二极管的阴极与所述第三二极管的阳极连接,所述第七二极管的阳极接地,所述第三二极管的阴极接电源,所述第七二极管和所述第三二极管的连接处与所述驱动芯片的第三引脚连接;
[0024]
所述第六二极管与所述第二二极管串联,所述第六二极管的阴极与所述第二二极管的阳极连接,所述第六二极管的阳极接地,所述第二二极管的阴极接电源,所述第六二极管和所述第二二极管的连接处与所述驱动芯片的第十三引脚连接;
[0025]
所述第五二极管与所述第一二极管串联,所述第五二极管的阴极与所述第一二极管的阳极连接,所述第五二极管的阳极接地,所述第一二极管的阴极接电源,所述第五二极管和所述第一二极管的连接处与所述驱动芯片的第十四引脚连接。
[0026]
采用上述进一步方案的有益效果是,设计8个续流二极管消除电机转动时的尖峰电压,从而保护电机。
[0027]
进一步,所述收集装置包括有滚动设置在机体上的滚筒,所述滚筒的轴线方向水平设置且所述滚筒的侧面与地面抵接;所述滚筒呈中空设置有用于存放网球的容纳腔,所述滚筒的侧壁设置有若干沿滚筒周向均匀分布的支撑杆,相邻支撑杆之间形成有与容纳腔相连通的拾取通道,所述拾取通道用于拾取球。
[0028]
采用上述进一步方案的有益效果是,当机器人在行驶时收集装置因地面摩擦而滚动,通过挤压将球通过拾取通道收集进容纳腔,可同时拾取多个球,拾球方便且效率高。
附图说明
[0029]
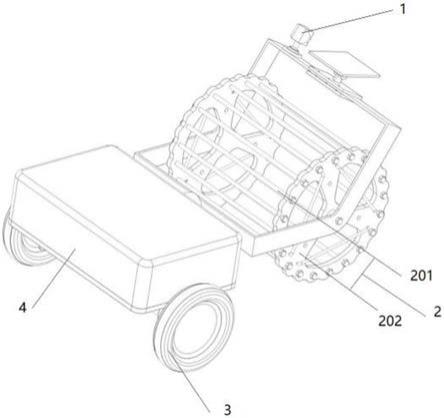
图1为本实用新型的机器人结构简图;
[0030]
图2为本实用新型控制模块电路结构简图;
[0031]
图3为本实用新型无线传输模块电路结构简图;
[0032]
图4为本实用新型数据采集模块电路结构简图;
[0033]
图5为本实用新型驱动模块电路结构简图;
[0034]
图6为本实用新型一个实施例的整体模块连接图;
[0035]
图中:1、图像传感器;2、收集装置;3、轮体;4、控制装置;201、滚筒; 202、支撑杆。
具体实施方式
[0036]
下面结合附图进一步详细描述本实用新型的技术方案,但本实用新型的保护范围不局限于以下。
[0037]
实施例1
[0038]
如图1和图6所示,一种拾球机器人,包括机体,机体上设置有用于收集球的收集装置、用于控制机体行驶的控制装置、驱动机体行驶的驱动装置,控制装置包括无线传输模块、控制模块、数据采集模块,控制模块与无线传输模块相互连接,无线传输模块与数据采集模块相互连接,数据采集模块用于采集机体的位置信息,无线传输模块用于将数据采集模块采集的位置信息发送至服务器。
[0039]
通过控制机器人行驶,收集装置拾取网球,在行驶的过程中数据采集模块采集机器人旋转的角度、行驶的加速度通过无线传输模块传输至服务器或上位机,可实时监测机器人的运行情况。
[0040]
无线传输模块为wifi、zigbee、蓝牙、uwb、nfc中的一种或多种。
[0041]
使用无线传输模块综合成本低,性能更稳定,组网灵活,可扩展性好,即插即用。管理人员可以迅速将新的无线监控点加入到现有网络中,不需要为新建传输铺设网络、增加设备,轻而易举地实现远程无线监控。
[0042]
无线传输模块包括型号为cc-debugger的调试器、型号为cc2530f256rhat 的主控单元、以及滤波电路,调试器与主控单元电连接,主控单元的第二十二引脚xosc_q1与第二十三引脚xosc_q2之间设置有第二一晶振y1,主控单元的输出端与滤波电路的输入端连接,滤波电路的输出端连接有天线接口,主控单元还与数据采集模块电连接。
[0043]
通过调试器下载程序到主控单元,主控单元根据指令将信息传输至滤波电路,滤
波电路对杂波滤出后通过天线将信息传输至服务器。滤波电路为nc滤波电路。设置nc滤波电路滤除杂波,减少干扰,增强电路稳定性。
[0044]
具体实施时,如图2和图3所示,控制模块使用深圳市元基盛业科技有限公司提供的stc89c52芯片,无线传输模块使用深圳市纳艾斯科技有限公司提供的cc2530f256rhat芯片为主控单元,cc2530f256rhat芯片与stc89c52芯片之间可通过串口通信,在本实施例中,将cc2530f256rhat芯片的i/o,如第十二引脚p0_7定义为数据发送口与stc89c52芯片的第十引脚p3.0数据接收口连接,将第十三引脚p0_6定义为数据接收口与stc89c52芯片的第十引脚p3.1数据发送口连接。cc2530f256rhat适应2.4-ghz ieee 802.15.4的rf收发器,具有极高的接收灵敏度和抗干扰性能,可编程的输出功率高达4.5dbm,且只需极少的外接元件,只需一个晶振,即可满足网状网络系统需要。调试器使用ccdebugger,cc2530f256rhat芯片的第二十二引脚xosc_q1与第二十三引脚 xosc_q2之间设置有第一晶振y1,cc2530f256rhat芯片的第二十五引脚rf_p和 cc2530f256rhat芯片的第二十六引脚rf_n之间设置有nc滤波电路,nc滤波电路的输出端连接有第一天线接口,设置nc滤波电路滤除杂波,减少干扰。
[0045]
如图3所示,nc滤波电路包括第二十三电容c23,第二十三电容c23的一端与所cc2530f256rhat芯片的第二十六引脚rf_n连接,第二十三电容c23的另一端与第四电感l4的一端连接,第四电感l4的另一端接地;第二十三电容 c23远离cc2530f256rhat芯片的第二十六引脚rf_n的一端与第二十四电容c24 的一端连接,第二十四电容c24的另一端与第六电感l6的一端连接,第六电感 l6的另一端与第三十一电容c31的一端连接,第三十一电容c31的另一端与 cc2530f256rhat芯片的第二十五引脚rf_p连接,第三十一电容c31远离 cc2530f256rhat芯片的第二十五引脚rf_p的一端与第三十四电容c34连接,第三十四电容c34另一端接地。
[0046]
数据采集模块包括型号为mpu6065的传感器,传感器的第二十三引脚scl 和第二十四引脚sda分别与无线传输模块电连接。集成了3轴mems陀螺仪,3 轴mems加速度计,可输出九轴的信号,将采集的加速度和运动幅度欧无线传输模块传输至服务器。
[0047]
具体的,如图4所示,数据采集模块包括型号为mpu6065的传感器,传感器的第二十三引脚scl和第二十四引脚sda分别与主控单元cc2530f256rhat芯片的i/0口连接,如第十六引脚p0_3和第十七引脚p0_2。
[0048]
具体的,结合图4和图2,驱动模块包括型号为l298的驱动芯片,驱动芯片的第五引脚in1、第七引脚in2、第十引脚in3、第十二引脚in4分别与控制模块的i/o口连接,如第一引脚p1.o、第二引脚p1.1、第三引脚p1.2、第四引脚p1.3,驱动芯片的第二引脚out1、第三引脚out2、第十三引脚out3、第十四引脚out4分别与电机电连接。
[0049]
使用l298芯片是h桥集成芯片,输出电流大,可用来驱动直流电动机和步进电动机,控制电机的正反转,驱动机器人行驶。
[0050]
还包括第八二极管、第四二极管、第七二极管、第三二极管、第六二极管、第二二极管、第五二极管、第一二极管,
[0051]
第八二极管与第四二极管串联,第八二极管的阴极与第四二极管的阳极连接,第八二极管的阳极接地,第四二极管的阴极接电源,第八二极管和第四二极管的连接处与驱动芯片的第二引脚连接;
[0052]
第七二极管与第三二极管串联,第七二极管的阴极与第三二极管的阳极连接,第七二极管的阳极接地,第三二极管的阴极接电源,第七二极管和第三二极管的连接处与驱动芯片的第三引脚连接;
[0053]
第六二极管与第二二极管串联,第六二极管的阴极与第二二极管的阳极连接,第六二极管的阳极接地,第二二极管的阴极接电源,第六二极管和第二二极管的连接处与驱动芯片的第十三引脚连接;
[0054]
第五二极管与第一二极管串联,第五二极管的阴极与第一二极管的阳极连接,第五二极管的阳极接地,第一二极管的阴极接电源,第五二极管和第一二极管的连接处与驱动芯片的第十四引脚连接。
[0055]
设计8个续流二极管消除电机转动时的尖峰电压,从而保护电机。
[0056]
收集装置2包括有滚动设置在机体上的滚筒202,滚筒202的轴线方向水平设置且滚筒202的侧面与地面抵接;滚筒202呈中空设置有用于存放球的容纳腔,滚筒202的侧壁设置有若干沿滚筒周向均匀分布的支撑杆201,相邻支撑杆 201之间形成有与容纳腔相连通的拾取通道,拾取通道用于拾取球。
[0057]
当机器人在行驶时收集装置2因地面摩擦而滚动,通过拾取通道将球收集进容纳腔,可同时拾取多个球,拾球方便且效率高。
[0058]
具体的,驱动装置包括有滚动设置在机体上的两个轮体3以及驱动轮体3 转动的电机;2个轮体相互连接,与滚筒201的轴线平行,电机与轮体3一一对应设置;控制装置4设置在机体上用于识别网球的图像传感器1,图像传感器1 与cc2530f256rhat芯片的i/0口连接,图像传感器1可使用高清摄像头,用于采集待拾球场地的视频或图像通过无线传输模块发送至服务器,进一步检测球场情况。
[0059]
以上仅是本实用新型的优选实施方式,应当理解本实用新型并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本实用新型的精神和范围,则都应在本实用新型所附权利要求的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1