一种手功能康复训练装置的制作方法
1.本发明涉及一种手功能康复训练装置,属于康复医疗器械技术领域。
背景技术:
2.目前,偏瘫患者逐年增加,大多数患者手功能出现部分或全部功能障碍,积极及时治疗是提高患者生活质量的手段,传统的药物治疗以后,后期康复效果多是不尽如人意,而康复医师治疗需要到专业康复医疗机构,康复时间比较长,久而久之患者失去耐心,目前采用康复训练器是保证患者康复治疗效果的一个重要手段,另外现在的手功能康复训练装置结构设计合理,实现手部的握力训练、以及腕关节的水平弯曲和旋转训练,并采用气压传感器、角度传感器实现患者训练过程中的检测。
3.现有的手功能康复器械多为穿戴式或者外动力驱动,控制系统复杂,安全性差,成本较高,很多患者在经济上难以承受,或者活动形式单一的自主运动。本手功能康复训练器不使用外来动力源,实现患者手指握力训练和手腕自主运动,并且可实现左、右手切换使用进行康复训练,采用气囊和气压传感器结合,实现握力检测,结构设计巧妙。
技术实现要素:
4.本发明目的在于:为手部运动功能障碍的患者提供一种手指抓握训练、腕关节水平摆动或者腕关节旋转运动的多自由度的手部康复训练器。
5.本发明的技术方案是这样实现的:一种手功能康复训练装置,包括底座1、支撑架2、悬臂5、手握装置6、转动架7、l形支架9、横梁12、控制系统17,所述的底座1上固定支撑架2,支撑架2上固定横梁12,悬臂5、横梁12均沿着前后方向水平设置,悬臂5在横梁12上的前后固定位置可调整,悬臂5前端通过摆动轴15铰接l形支架9,悬臂5在铰接处设置有角度传感器a10,用于检测悬臂5与铰接l形支架9之间的角度变化,l形支架9上连接有转动架7,转动架7固定手握装置6。
6.所述的手握装置6包括支撑柱601、固定座603、气压传感器604、气囊606,转动架7固定所述的固定座603,固定座603固定支撑柱601的下端,支撑柱601设置有沿着上下方向贯穿的圆柱形通道,支撑柱601的圆柱形通道下端固定安装气压传感器604,所述的支撑柱601上沿着上下方向均布设置有若干个沿着水平方向贯穿的透孔605,支撑柱601的外侧套设有圆柱形的气囊606,所述的角度传感器a10、气压传感器604通过线路与控制系统连接。
7.所述的手功能康复训练装置,还包括角度传感器b8、前端转轴,所述的l形支架9呈l形,悬臂5前端通过腕部转轴16铰接l形支架9的l形一边后端,l形支架9的l形另一边向上侧伸出,l形支架9的l形另一边上端转动安装前端转轴,前端转轴向后穿出固定转动架7,前端转轴向前穿出固定角度传感器b8,角度传感器b8的外壳固定在l形支架9的l形另一边上,转动架7为向下伸出的扇形转动板701,扇形转动板701的扇形中心固定在前端转轴后端,扇形转动板701的扇形边缘均布设置有若干个销孔702,l形支架9的l形另一边下部与销孔702相适应的位置设置有一个弹簧插销13,弹簧插销13的后端可向后伸出或者缩回,向后伸出
时插入到一个销孔702内,扇形转动板701的下端设置有向后伸出的连接板,连接板的后端固定手握装置6,所述的角度传感器b8通过线路与控制系统连接。
8.所述的手握装置6还包括固定套602,气囊606下端固定在固定套602上,固定套602固定在连接板的后端,气囊606下端与支撑柱601下端密封连接。
9.所述的相邻的透孔605相互垂直设置。
10.所述的支撑柱601的上端设置有球形凸起607,用以防止患者的手掌抓握气囊606时脱出。
11.所述的气囊采用软橡胶材料制成。
12.所述的悬臂5在横梁12上的前后固定位置可调整的结构为:悬臂5的后部与横梁12设置的滑槽滑动连接,横梁12的滑槽设置有从外侧贯穿至中心的螺纹孔,螺纹孔旋合锁紧手柄11的丝杠。
13.所述的横梁12上端固定臂托架4,臂托架4上设置有弹性绑带3,用于绑缚固定患者的小臂,所述的悬臂5在铰接处设置有角度传感器a10的结构为:所述的悬臂5的前端与腕部转轴16转动连接,腕部转轴16与l形支架9的l形一边端部固定连接,腕部转轴16固定角度传感器a10的转轴,角度传感器a10的外壳固定在悬臂5上,用以检测l形支架9与悬臂5之间的转动角度。
14.所述的悬臂5上固定有防护盖14,防护盖14位于腕部转轴16的正上方,用于遮挡腕部转轴16。
15.本实用新型的有益效果:
16.1. 实现手指抓握和腕关节联动,方便不同患者针对自身关节需要进行手指、手腕、尺桡关节的重点训练;
17.2. 无需外界提供动力,依靠患者自主运动,安全性高;
18.3. 无需更换零件,能够实现另外一侧手功能康复训练,节约成本;
19.4. 腕关节固定位置可调,提高患者康复运动的舒适度;
20.5.通过抓握气囊,实现气囊内的气压变化,气压传感器检测患者手指的握力,结构设计合理,检测数据可靠。
附图说明
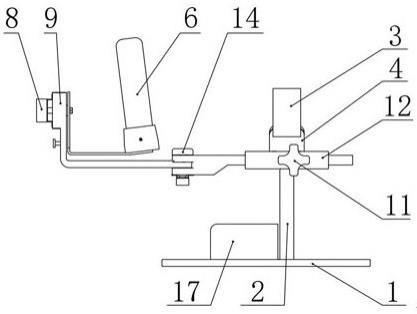
21.图1是手功能康复训练装置的总体结构的主视图。
22.图2是手功能康复训练装置的总体结构的左视图。
23.图3是手功能康复训练装置的总体结构的立体图一。
24.图4是手功能康复训练装置的总体结构的立体图二。
25.图5是手功能康复训练装置前半部分的结构示意图。
26.图6是手握装置的剖视图。
27.附图标记说明:1
‑
底座、2
‑
支撑架、3
‑
弹性绑带、4
‑
臂托架、5
‑
悬臂、6
‑
手握装置、601
‑
支撑柱、602
‑
固定套、603
‑
固定座、604
‑
气压传感器、605
‑
透孔、606
‑
气囊、607
‑
球形凸起、7
‑
转动架、701
‑
扇形转动板、702
‑
销孔、8
‑
角度传感器b、9
‑
l形支架、10
‑
角度传感器a、11
‑
锁紧手柄、12
‑
横梁、13
‑
弹簧插销、14
‑
防护盖、15
‑
摆动轴、16
‑
腕部转轴、17
‑
控制系统。
具体实施方式
28.结合图1
‑
6,本实用新型的一种手功能康复训练装置,包括底座1、支撑架2、弹性绑带3、臂托架4、悬臂5、手握装置6、转动架7、角度传感器b8、l形支架9、角度传感器a10、锁紧手柄11、横梁12、弹簧插销13、防护盖14、摆动轴15、腕部转轴16、控制系统17,所述的手握装置6包括支撑柱601、固定套602、固定座603、气压传感器604、气囊606,以康复训练患者的上下、前后、左右方向定义本申请的上下、前后、左右方向,以便描述本申请,所述的底座1上固定支撑架2下端,支撑架2上端固定横梁12,横梁12沿着前后方向水平设置,悬臂5沿着前后方向设置,悬臂5的后部与横梁12设置的滑槽滑动连接,横梁12上端固定臂托架4,臂托架4上设置有弹性绑带3,用于绑缚固定患者的小臂,横梁12的滑槽设置有从外侧贯穿至中心的螺纹孔,螺纹孔旋合锁紧手柄11的丝杠,旋紧锁紧手柄11其丝杠端部顶紧悬臂5,实现悬臂5在横梁12上滑动后的位置固定,悬臂5的前端与腕部转轴16转动连接,腕部转轴16与l形支架9的l形一边端部固定连接,腕部转轴16固定角度传感器a10的转轴,角度传感器a10的外壳固定在悬臂5上,用以检测l形支架9与悬臂5之间的转动角度,l形支架9的l形另一边向上侧伸出,l形支架9的l形另一边上端转动安装前端转轴,前端转轴向后穿出固定转动架7,前端转轴向前穿出固定角度传感器b8,角度传感器b8的外壳固定在l形支架9的l形另一边上,转动架7为向下伸出的扇形转动板701,扇形转动板701的扇形中心固定在前端转轴后端,扇形转动板701的扇形边缘均布设置有若干个销孔702,l形支架9的l形另一边下部与销孔702相适应的位置设置有一个弹簧插销13,弹簧插销13的后端向后伸出插入到一个销孔702内,用以实现扇形转动板701调整摆动调整位置后的固定,扇形转动板701的下端设置有向后伸出的连接板,连接板的后端固定手握装置6,连接板的后端固定所述的固定座603,固定座603固定支撑柱601的下端,支撑柱601设置有沿着上下方向贯穿的圆柱形通道,支撑柱601的圆柱形通道下端固定安装气压传感器604,用于检测圆柱形通道内的气体压力,所述的支撑柱601上沿着上下方向均布设置有若干个沿着水平方向贯穿的透孔605,且相邻的透孔605相互垂直设置,支撑柱601的外侧套设有圆柱形的气囊606,气囊606下端固定在固定套602上,固定套602固定在连接板的后端,气囊606下端与支撑柱601下端密封连接,所述的支撑柱601的上端设置有球形凸起607,用以防止患者的手掌抓握气囊606时脱出。所述的气囊采用软橡胶材料制成。
29.所述的角度传感器a10、角度传感器b8、气压传感器604通过线路与控制系统连接,角度传感器a10的角度变化用于检测患者腕关节沿着水平方向的摆动情况,角度传感器b8的角度变化用于检测患者腕关节扭转情况,气压传感器604用于检测患者手指的握力大小,实现患者康复训练后的改善或者健康状态的评估。
30.患者需要手指握力训练时,患者手指放在气囊606上,从销孔702内拔出弹簧插销13,转动架7摆动,适宜患者手掌位置姿态,将弹簧插销13插入到相邻的销孔702内,然后旋松锁紧手柄11,调整悬臂5的前后位置,实现小臂固定位置的调整,将小臂放在臂托架4上,旋紧锁紧手柄11,绑紧弹性绑带3固定患者的小臂,患者手指抓握气囊606,抓紧气囊时,气囊606内的气体压缩,气囊内气体通过透孔605、圆柱形通道将气压变化传递给气压传感器604,检测到患者的握力。
31.患者需要进行腕关节水平摆动时,患者手指放在气囊606上,调整转动架7摆动适宜患者手掌位置姿态,调整悬臂5的前后位置,绑紧患者的小臂,患者手指抓握气囊606,并
进行腕关节的水平左右摆动,角度传感器a10检测患者的腕关节的摆动范围。
32.患者需要进行腕关节旋转训练时,患者手指放在气囊606上,从销孔702内拔出弹簧插销13并且不再插入到销孔702内,调整悬臂5的前后位置,绑紧患者的小臂,患者手指抓握气囊606,并进行腕关节的旋转摆动,角度传感器a10检测患者的腕关节的摆动范围。
33.也可以是上述三种训练方式的任意组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1