一种积木刷卡编程机器人套件的制作方法
1.本实用新型涉及一种可用于青少年机器人编程教育的教具,具体为一种积木刷卡编程机器人套件。
背景技术:
2.随着人工智能的发展,机器人教育已经成为了一个热点,越来越被人们所关注。积木类编程机器人拥有丰富的结构件,装配容易,结合配套的控制器、传感器和执行器,可以创造出各种生动有趣的机器人造型,成为青少年机器人教育的首选产品。由于基于台式或者平板电脑的机器人编程容易对孩子的眼睛造成伤害,积木类的刷卡编程机器人非常适合低年龄段的孩子。然而,目前市场上的刷卡编程机器人存在以下几个问题:(1)所采用的编程卡主要以光电式卡片为主,该类卡片成本虽然较低,但识别稳定性较差;(2)采用的机器人控制器接口资源较少,传感功能较为简单;(3)配套的结构件自成体系、互不兼容、开放性低。
技术实现要素:
3.本实用新型针对现有产品存在的上述不足,提出了一种适合低年龄段孩子的刷卡编程机器人套件,编程卡采用非接触式的rfid卡,具有读取速度快、读取稳定等优点,而且机器人的控制器、传感器与执行器不仅功能丰富,而且它们完全与市场上常用的积木兼容,可满足不同功能造型的机器人搭建。
4.为实现上述目的,本实用新型提供如下技术方案:
5.本实用新型提供了一种积木刷卡编程机器人套件,它主要包括机器人控制器、机器人编程器、编程卡、传感器、执行器和结构件;
6.所述机器人控制器的内部设有处理器,具有数字输出接口、数字输入接口、电机驱动接口、程序下载接口及充电接口,机器人控制器内置有可充电电源;
7.所述机器人编程器的内部有rfid读卡器,用于读取编程卡的信息,并将该信息传送到机器人控制器中执行;
8.所述编程卡分为循环卡、时间卡、电机卡、信号检测卡、遥控卡和功能卡,用于控制机器人的传感器和执行器;
9.所述传感器用于机器人感知外部的环境,主要由红外测距模块、声音模块及红外接收模块组成;
10.所述执行器主要由按键开关、蜂鸣器、led灯和直流减速电机组成;
11.所述结构件主要由方砖、方梁、连杆、齿轮、销、轴部件组成。
12.根据上述的积木刷卡编程机器人套件,所述机器人控制器采用32位处理器,充电接口采用usb接口,数字输出接口、数字输入接口、电机驱动接口、程序下载接口均采用采用rj45网口,可与机器人的传感器和执行器相连。
13.根据上述的积木刷卡编程机器人套件,所述机器人控制器的控制面板中心设置有
电源启动、程序运行和音乐播放三个按键;面板上的颗粒和四周的销孔可兼容的积木套件。
14.根据上述的积木刷卡编程机器人套件,所述机器人编程器可以与机器人控制器的程序下载端口直接相连,将读取的程序发送给机器人主控制器;机器人编程器的面板上有程序下载、清除和启动三个按钮。
15.根据上述的积木刷卡编程机器人套件,所述编程卡中的循环卡主要实现程序循环;时间卡可以让程序等待固定的时间;电机卡主要用于驱动电机执行对应的功能;信号检测卡用于检测输入口是否有信号;遥控卡可以通过使用遥控器控制机器人运动;集成卡是可以实现机器人不同的功能,每类机器人编程卡具体由不同数量功能的编程卡组成。
16.根据上述的积木刷卡编程机器人套件,所述传感器的接口均采用rj45网口。
17.根据上述的积木刷卡编程机器人套件,所述执行器中的直流减速电机通过动力轴输出动力。
18.与现有技术相比,本实用新型的有益效果是:
19.本套件是一种适合低年龄段孩子的刷卡编程机器人套件,编程卡采用非接触式的rfid卡,具有读取速度快、读取稳定等优点,而且机器人的控制器、传感器与执行器不仅功能丰富,而且它们完全与市场上常用的积木兼容,可满足不同功能造型的机器人搭建。
附图说明
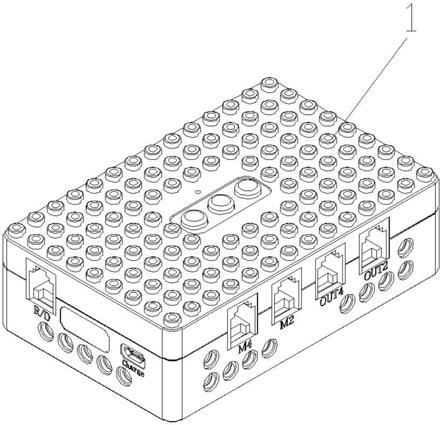
20.图1是机器人控制器的结构图;
21.图2是机器人编程器的结构图;
22.图3是机器人传感器和执行器(直流减速电机除外)的结构图;
23.图4是机器人直流减速电机的结构图;
24.图5是机器人编程卡简图;
25.图6是搭建飞机机器人结构图;
26.图7是搭建大风车机器人结构图;
27.图8是搭建战车机器人结构图;
28.图9是搭建走钢丝机器人结构图。
具体实施方式
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
30.请参阅图1
‑
6,本实用新型提供的一种实施例:一种积木刷卡编程机器人套件,它主要包括机器人控制器1、机器人编程器2、编程卡3、传感器4、执行器5和结构件6;
31.所述机器人控制器1的内部设有处理器,具有数字输出接口、数字输入接口、电机驱动接口、程序下载接口及充电接口,机器人控制器内置有可充电电源;
32.所述机器人编程器2的内部有rfid读卡器,用于读取编程卡的信息,并将该信息传送到机器人控制器中执行;
33.所述编程卡3分为循环卡、时间卡、电机卡、信号检测卡、遥控卡和功能卡,用于控制机器人的传感器4和执行器5;
34.所述传感器4用于机器人感知外部的环境,主要由红外测距模块、声音模块及红外接收模块组成;
35.所述执行器5主要由按键开关、蜂鸣器、led灯和直流减速电机组成;
36.所述结构件6主要由方砖、方梁、连杆、齿轮、销、轴部件组成。
37.以下为例,提供一种积木刷卡编程机器人套件,包括一个机器人控制器、一个机器人编程器、三种机器人传感器、四种机器人执行器、六类机器人编程卡和若干机器人机构件。
38.如图1所示,所述的机器人控制器的整体尺寸:112mm*72mm*35mm(长*宽* 高),内置可充电锂电池3.7v/1500mah,具有以下特征:采用32位处理器,具有4个数字输出端口、3个数字输入端口、4个电机驱动端口、1个程序下载端口和1个充电端口;(2)为了便于插拔信号线,除充电接口采用微型usb接口外,其余接口全部采用rj45网口,可直接与机器人的传感器和执行器相连;(3) 面板中心有电源启动、程序运行和音乐播放三个按键;(4)面板上的颗粒和四周的销孔可兼容市场上常用的积木套件。
39.如图2所示,所述的机器人编程器的整体尺寸:112mm*72mm*35mm(长*宽* 高),具有以下特征:(1)内部集成有rfid读卡器,可以直接读取编程卡片中的程序,并将它们存储起来;(2)可以与机器人主控制器的程序下载端口直接相连,将读取的程序发送给机器人主控制器;(3)面版上有程序下载、清除和启动三个按钮。
40.如图3所示,所述的机器人传感器的整体尺寸:40mm*16mm*24.3mm(长*宽 *高),接口全部采用rj45网口,面板上的颗粒可兼容市场上常用的积木套件,累计有红外测距、声音和红外接收三种传感器,它们的内部结构可以不同,但外观保持一样。
41.所述的机器人执行器主要有四种,分别是按键开关、蜂鸣器、led灯和直流减速电机。其中,按键开关、蜂鸣器、led灯的外观和机器人传感器是一样的。如图4所示,所述的直流减速电机的尺寸:42mm*42mm*23.6mm(长*宽*高),通过动力轴输出动力。
42.所述的机器人编程卡主要有六类,分别是循环卡、时间卡、电机卡、信号检测卡、遥控卡和集成卡,循环卡主要实现程序循环;时间卡可以让程序等待固定的时间;电机卡主要用于驱动电机执行对应的功能。信号检测卡用于检测输入口是否有信号;遥控卡可以通过使用遥控器控制机器人运动;集成卡是可以实现机器人某一功能;每类机器人编程卡具体由不同数量功能的编程卡组成,图5给出了每类编程卡的一种样例。
43.所述的机器人机构件由方砖、方梁、连杆、齿轮、销、轴等机械零部件组成,结合所述的机器人控制器、传感器和执行器,可以搭建出不同功能造型的机器人,比如飞机、大风车、战车、走钢丝机器人,如图6
‑
9所示。
44.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1