具有动态乘坐交通工具配置的乘坐系统的制作方法
具有动态乘坐交通工具配置的乘坐系统
背景技术:
1.本章节旨在向读者介绍可能与本公开的各种方面有关的各种技术方面,这些技术方面在下文中描述和/或要求保护。本讨论被认为在给读者提供背景信息以促进更好地理解本公开的各种方面上是有帮助的。因此,应当理解,这些陈述将从这个角度来阅读,而非作为对现有技术的承认来阅读。
2.主题公园或游乐园乘坐景点已变得越来越流行。游乐园乘坐设备往往包括行进乘坐设备,行进乘坐设备包括沿着路径行进的乘坐交通工具、可以包括运动底座的固定乘坐设备或它们的组合。行进乘坐设备的路径可以就位于不同的周围环境中(例如,在山顶上、在隧道中、在水下)。沿着该路径,可以存在不同类型的演出事件,诸如,移动动作形象(例如,电子动画)、视频屏幕投影、声音效果、水效果等等。
3.在某些传统的乘坐景点中,使用者体验可能受到对乘坐者视角或体验的可调整性的限制的影响。例如,在某些传统的实施例中,在每次乘坐期间,乘坐体验可以是相同或基本上类似的。而且,在某些传统的实施例中,某些乘坐特征(诸如,就位于轨道上或就位于轨道周围的演出元素)的影响可能被乘坐者的基本上停滞的视角或取向限制。因而,现在认识到,改进的乘坐系统及其乘坐交通工具是期望的。
技术实现要素:
4.在下文中总结在范围上与原先要求保护的主题相应的某些实施例。这些实施例不旨在限制本公开的范围,而是更确切地说,这些实施例仅旨在提供某些公开的实施例的简短概要。实际上,本公开可以包含可以与下文中所阐明的实施例类似或不同的各种各样的形式。
5.根据本公开的一个方面,乘坐系统包括第一乘坐交通工具,第一乘坐交通工具具有沿着第一乘坐交通工具的第一外侧暴露的第一磁体和沿着第一乘坐交通工具的第一另外的外侧暴露的第一另外的磁体。乘坐系统包括第二乘坐交通工具,第二乘坐交通工具具有沿着第二乘坐交通工具的第二外侧暴露的第二磁体和沿着第二乘坐交通工具的第二另外的外侧暴露的第二另外的磁体。乘坐系统包括控制系统,控制系统配置成控制第一乘坐交通工具和第二乘坐交通工具中的一者或两者的操纵以:在第一配置下建立第一磁体与第二磁体之间的耦合,在第二配置下建立第一磁体与第二另外的磁体之间的耦合,在第三配置下建立第一另外的磁体与第二磁体之间的耦合,在第四配置下建立第一另外的磁体与第二另外的磁体之间的耦合。
6.根据本公开的另一个方面,乘坐系统包括基本上平滑的乘坐路径表面。乘坐系统还包括第一自动引导交通工具(agv),第一自动引导交通工具(agv)具有第一磁体,并且具有配置成使能第一agv沿着基本上平滑的乘坐路径表面的移动的第一轮组。乘坐系统还包括第二agv,第二agv具有第二磁体,并且具有配置成使能第二agv沿着基本上平滑的乘坐路径表面的移动的第二轮组。乘坐系统还包括第三agv,第三agv具有第三磁体,并且具有配置成使能第三agv沿着基本上平滑的乘坐路径表面的移动的第三轮组。乘坐系统包括控制系
统,控制系统配置成操纵第一agv、第二agv、第三agv或它们的任何组合,以使能在第一配置下的在第一磁体与第二磁体之间的耦合、在第二配置下的在第一磁体与第三磁体之间的耦合以及在第三配置下的在第二磁体与第三磁体之间的耦合。
7.根据本公开的另一方面,乘坐系统包括:第一乘坐交通工具,其具有从第一乘坐交通工具的第一外侧延伸的第一磁体;第二乘坐交通工具,其具有从第二乘坐交通工具延伸的第二外侧的第二磁体;以及控制系统。控制系统配置成操纵第一乘坐交通工具、第二乘坐交通工具或两者,以使能第一磁体中的某些与第二磁体中的某些的沿着乘坐系统乘坐路径的动态耦合和解耦,使得乘坐交通工具配置在乘坐路径的过程期间改变,其中,乘坐交通工具配置包括相对于乘坐路径的末端的交通工具行进顺序、交通工具行进方向或相对于交通工具行进方向的交通工具取向中的至少一个。
附图说明
8.当参考附图而阅读以下的详述时,本公开的这些及其它特征、方面以及优点将变得更好理解,在附图中,贯穿附图,相同的字符表示相同的部分,其中:图1是根据本公开的方面的乘坐系统的示意性说明,该乘坐系统具有多个乘坐交通工具(诸如,自动引导交通工具(agv))和用于控制多个乘坐交通工具的控制系统;图2是根据本公开的方面的供图1的乘坐系统之用的具有耦合磁体的agv的正视图;图3是根据本公开的方面的图2的agv的侧视图;图4是根据本公开的方面的图2的agv的自顶向下的视图;图5是根据本公开的方面的供图1的乘坐系统之用的多个agv的可能的耦合操纵的自顶向下的视图;图6是根据本公开的方面的以六交通工具式集群耦合的图1的乘坐系统的多个agv的透视图;图7是根据本公开的方面的由此agv对以二交通工具式集群耦合的图6的多个agv的透视图;图8是根据本公开的方面的由此每个agv与多个agv中的其它agv完全地解耦的图6的多个agv的透视图;图9是根据本公开的方面的由此每个agv在与多个agv中的其它agv解耦时被独立地操纵的图6的多个agv的透视图;图10是根据本公开的方面的由此每个agv在与多个agv中的其它agv解耦时被独立地操纵的图6的多个agv的透视图;图11是根据本公开的方面的由此与图8中的对不同的agv对以二交通工具式集群耦合的图6的多个agv的透视图;图12是根据本公开的方面的以八交通工具式集群耦合的图1的乘坐系统的多个agv的透视图;图13是根据本公开的方面的继交通工具解耦之后并且启动演出元素耦合的图12的多个agv的透视图;图14是根据本公开的方面的与乘坐系统的演出元素耦合的图12的多个agv的透视
图;图15是根据本公开的方面的耦合到乘坐系统的演出元素的图12的多个agv的透视图;图16是根据本公开的方面的与乘坐系统的演出元素解耦的图12的多个agv的透视图;图17是根据本公开的方面的耦合以形成八交通工具式集群的图12的多个agv的透视图;以及图18是说明根据本公开的方面的操作图1的乘坐系统的方法的的过程流程图。
具体实施方式
9.目前公开的实施例涉及具有动态乘坐交通工具配置的乘坐交通工具。更特别地,目前的实施例涉及模块化乘坐交通工具,除了其它重新配置以外,模块化乘坐交通工具还能够被控制以遍及乘坐系统的乘坐路径形成各种尺寸的乘坐交通工具集群,以相对于行进方向遍及乘坐路径改变乘坐交通工具的取向,以相对于乘坐路径的起点或末端改变乘坐交通工具沿着乘坐路径行进的顺序,并且以与沿着乘坐路径设置的各种演出元素交互。
10.主题公园或游乐园乘坐景点已变得越来越流行。游乐园乘坐设备往往包括行进乘坐设备,行进乘坐设备包括沿着路径行进的乘坐交通工具、可以包括运动底座的固定乘坐设备或它们的组合。行进乘坐设备的路径可以就位于不同的周围环境中(例如,在山顶上、在隧道中、在水下)。沿着该路径,可以存在不同类型的演出事件,诸如,移动动作形象(例如,电子动画)、视频屏幕投影、声音效果、水效果等等。
11.在某些传统的乘坐景点中,使用者体验可能受到对乘坐者视角或体验的可调整性的限制的影响。例如,在某些传统的实施例中,在每次乘坐期间,乘坐体验可以是相同或基本上类似的。而且,在某些传统的实施例中,某些乘坐特征(诸如,就位于轨道上或就位于轨道周围的演出元素)的影响可能被乘坐者的基本上停滞的视角或取向限制。因而,现在认识到,改进的乘坐系统及其乘坐交通工具是期望的。
12.根据本公开,乘坐系统可以包括乘坐交通工具(例如,自动引导交通工具(agv)),乘坐交通工具是可联结的并且可分离的从而调制乘坐交通工具的乘坐配置。agv可以是便携或机器人交通工具,便携或机器人交通工具具有独立的运动自由并且例如经由标记、磁体,传感器或它们的组合的帮助来沿着基本上平滑的乘坐路径行进。所公开的乘坐系统的乘坐交通工具(例如,agv)可以是模块化的(例如,基本上类似),以改进乘坐交通工具的可互换性从而形成不同的乘坐配置。例如,每个乘坐交通工具可以配备有一个或多个磁体。在某些实施例中,每个乘坐交通工具可以包括围绕乘坐交通工具的周界或外表面设置的许多磁体。磁体可以使能乘坐交通工具(例如,agv)彼此耦合和解耦和/或与演出元素耦合和解耦从而促进不同的乘坐配置,诸如,乘坐交通工具的不同的单元或集群、乘坐交通工具的不同的行进方向,乘坐交通工具相对于彼此和/或相对于行进方向的不同的取向(即,滚转、俯仰、偏航)、乘坐交通工具的不同的行进顺序(例如,相对于乘坐路径的末端或沿着乘坐路径的另一个静止参考系)、乘坐交通工具之间的不同的分离距离等等。应当注意到,在一些实施例中,磁体可以永久地或基于由控制器或控制系统对磁体的控制而包括相反的极性,使得某些组合引起邻近的乘坐交通工具的磁性排斥。例如,控制系统可以使通过电磁体的电
流反向以使极性反向,或控制系统可以使条形磁体旋转以改变磁体的从乘坐交通工具面朝外的部分的极性。
13.除了单独的乘坐交通工具(例如,沿着单独的乘坐交通工具的两个或更多个类似的侧部设置于类似位置的磁体)的各种区域的模块化之外,乘坐交通工具的模块化可以使能乘坐系统相较于传统实施例的增强的配置(例如,改进的配置量和改进的配置类型或分类)。通过使能增强的配置,乘坐者体验在乘坐过程期间被改进,并且,乘坐者体验可能从一次乘坐到下一次乘坐而不同。这些特征和其它特征将在下文中参考附图而详细地描述。
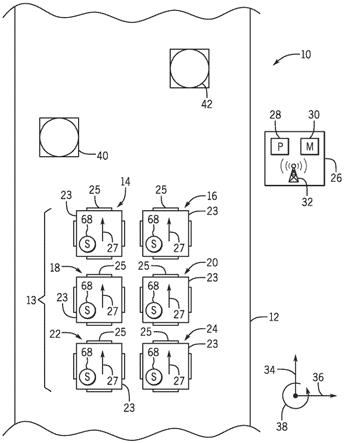
14.图1是乘坐系统10的实施例的示意性说明,乘坐系统10具有许多乘坐交通工具13(诸如,自动引导交通工具(agv))和用于控制乘坐交通工具13的控制系统26。乘坐交通工具13可以配置成容纳乘客,诸如,每个乘坐交通工具13容纳一个或两个乘客,然而,其它实施例可以包括每个乘坐交通工具13容纳不同数量的乘客。乘坐交通工具13包括第一乘坐交通工具14、第二乘坐交通工具16、第三乘坐交通工具18、第四乘坐交通工具20、第五乘坐交通工具22以及第六乘坐交通工具24。然而,任何数量的乘坐交通工具13可以被包括在乘坐系统10中,诸如,两个、三个、四个、五个、六个、七个、八个、九个、十个或更多个乘坐交通工具13。
15.所说明的乘坐交通工具13可以沿着乘坐路径12(诸如,基本上平滑的乘坐路径)行进。即,乘坐路径12可能不包括在其上设置有乘坐交通工具13的轨道。而是,乘坐交通工具13可以包括使能乘坐交通工具13沿着基本上平滑的乘坐交通工具路径12的移动的轮组(未示出)。应当注意到,“基本上平滑”可以指乘坐路径12不包括乘坐交通工具13沿着其被引导的轨道或结构元件,然而,基本上平滑的乘坐路径12可以包括乘坐交通工具13沿着其行进的弯曲部,诸如小山。乘坐交通工具13的移动可以至少部分地由控制系统26控制。控制系统26可以包括处理器28、存储器30以及通信电路系统32,通信电路系统32使能控制系统26与乘坐交通工具13之间的通信(例如,远程或无线通信)。存储器30可以包括存储于其上的指令,所述指令在由处理器28执行时引起处理器28做出与乘坐交通工具13相关的确定并且引起经由通信电路系统32来与乘坐交通工具13通信。
16.在一些实施例中,每个乘坐交通工具13可以包括诸如接近度传感器之类的传感器68,传感器68能够将传感器反馈传递到控制系统26,使得处理器28可以至少部分地基于传感器反馈而做出与乘坐交通工具13相关的确定。例如,传感器68可以检测乘坐交通工具13对于邻近的乘坐交通工具13和/或对于乘坐系统10的其它特征(诸如,演出元素40、42)的接近度。而且,控制系统26可以包括如所示出的远程控制器或远程控制系统和/或安装于乘坐交通工具13中的每个上的单独的控制器,由此,根据下文中的描述,位于乘坐交通工具13上的控制特征和远程情形下的控制特征能够通信,以促进乘坐交通工具13的操纵。
17.乘坐交通工具13还可以包括磁体25,磁体25沿着乘坐交通工具13的外部设置或暴露。磁体25可以是经由可由例如控制系统26(或单独的乘坐交通工具控制器)控制的电流来磁化的电磁体,或磁体25可以是永磁体。在其中磁体25为电磁体的一些实施例中,控制系统26可以使磁体25中的一个或多个内的电流反向,以使一个或多个磁体25的极性反向,这可能引起磁性排斥。在其它实施例中,条形磁体可以被旋转以改变条形磁体的从乘坐交通工具13面朝外的极性。磁性排斥能够被利用来使磁体磁性地解耦和/或引起乘坐交通工具13中的一个或多个的移动。
18.如所示出的,每个乘坐交通工具13包括矩形形状,然而,在其它实施例中乘坐交通工具13的形状可能不同。更特别地,每个乘坐交通工具13可以包括由乘坐交通工具13的缓冲器形成的基本上矩形的缓冲器形状23,由此,磁体25设置于基本上矩形的缓冲器形状的每一侧上。即,一个磁体25(或多个)可以设置于前部缓冲器上,另一个磁体25(或多个)可以设置于后部缓冲器上,另一个磁体25(或多个)可以设置于侧部缓冲器上,并且,另一个磁体25(或多个)可以设置于相反的侧部缓冲器上。磁体25可以使能邻近的乘坐交通工具13的各种缓冲器的耦合,将参考后面的附图而对此详细地进行描述。对“前部缓冲器”、“后部缓冲器”以及“侧部缓冲器”的引用可以指示乘坐交通工具13内的乘客面向的方向的相关用语。例如,如所示出的,乘坐交通工具13中的乘客可以如取向箭头27所指示的那样正朝向演出元素40、42面向前方。因而,在所说明的实施例中,最接近演出元素40、42的规则缓冲器形状的缓冲器节段可以是“前部缓冲器”。应当注意到,虽然乘坐交通工具13包括四个磁体(矩形缓冲器形状23的每个缓冲器上一个磁体),但在其它实施例中,基本上矩形的缓冲器形状23的每一侧可以包括彼此分离的两个或更多个磁体。
19.所说明的实施例中的交通工具13彼此分离,并且设置于乘坐路径12上。如将在后面的附图的视图和对应描述中意识到的,交通工具13的磁体25可以选择性地被耦合(例如,通过控制系统26和/或经由与乘坐交通工具13的相对接近度相关的传感器反馈的帮助,该传感器反馈可以被控制系统26接收)和解耦。磁体25可以促进传统的锁定机构的改进的耦合,这是因为磁体25仅要求接触,而传统的锁定机构可能要求使乘坐交通工具13减慢或停止以锁定地接合。
20.乘坐交通工具13可以是沿着乘坐路径12沿方向34(或与其相反的方向)和沿方向36(或与其相反的方向)可操纵的。而且,乘坐交通工具13可以沿周向方向38(或与其相反的方向)偏航。因而,虽然在所说明的实施例中,乘坐交通工具13中的每个的取向方向27基本上类似,但乘坐交通工具13可以被操纵以包括不同的取向方向27(例如,相对于乘坐路径12的起点或末端、乘坐路径12的演出元素40、42或一些其它基本上静止的参考点)。如先前所描述的,控制系统26可以操作以控制乘坐交通工具13的移动。在某些实施例中,乘坐交通工具13可以包括独立地或与控制系统26联合而操作以操纵乘坐交通工具13的单独的控制器(例如,设置于特定乘坐交通工具13上)。
21.如所示出的,乘坐交通工具13是模块化的,这意味着每个乘坐交通工具13可以与另一个乘坐交通工具13是可互换的。换而言之,第一乘坐交通工具14基本上类似于第二乘坐交通工具16、第三乘坐交通工具18、第四乘坐交通工具20、第五乘坐交通工具22以及第六乘坐交通工具24。至少部分地由于乘坐交通工具13是模块化的,包括沿着每个乘坐交通工具13的若干外表面设置的磁体25,并且沿方向34、36、38(或与其相反的方向)是可操纵的,因而乘坐交通工具13的配置能够沿着乘坐路径12动态地被改变。例如,如先前所描述的,行进方向可以被改变,取向可以被改变,乘坐交通工具13的分组可以被改变,行进顺序(例如,相对于沿着乘坐路径12的参考点,诸如乘坐路径12的起点或末端)可以被改变,单独的乘坐交通工具13或乘坐交通工具13群组(例如,“集群)之间的距离可以被改变,与乘坐系统10的演出元素40、42的交互可以被启动等等。这些特征和其它特征将参考附图而在下文中详细地描述。
22.图2是图1的第一乘坐交通工具14的实施例的正视图。如先前所描述的,图1的乘坐
交通工具13可以是模块化的,或包括模块化耦合特征,这意味着图2的所说明的第一乘坐交通工具14可以基本上类似于图1的其它乘坐交通工具13或包括与图1的其它乘坐交通工具13基本上类似的耦合特征。相对于传统实施例,该模块化提高可能的重新配置的类型的量。所说明的乘坐交通工具14将在下文中被称为agv。agv 14包括各自配置成容纳乘客的两个乘客座椅63。而且,agv 14包括两个安全约束杆60和与两个乘客座椅63对应的两个头枕62。在所说明的实施例中,agv 14包括第一外侧(例如,前部缓冲器66)、从第一外侧延伸的两个第二外侧(例如,两个侧部缓冲器71、72)以及第四外侧(例如,后部缓冲器[未示出])。前部缓冲器66包括两个磁体25,并且,相反的侧部缓冲器71、72可以各自包括两个磁体25,然而,由于所说明的视角导致示出沿着侧部缓冲器71、72的仅一个磁体25。
[0023]
如先前所描述的,第一agv 14的磁体25可以沿着乘坐路径12的各种节段同其它乘坐交通工具的其它磁体耦合和解耦。所说明的agv 14还包括促进agv沿着乘坐路径12的移动的轮组70。而且,agv 14包括例如沿着agv 14的外部设置的至少一个(例如,一个、两个、三个、四个或更多个)接近度传感器68。所说明的实施例中的接近度传感器68设置成邻近位于前部缓冲器66与侧部缓冲器71、72之间的边缘。接近度传感器68可以检测邻近的乘坐交通工具的接近度,并且可以将接近度数据发送到图1中所说明的控制系统26,控制系统26可以至少部分地基于传感器反馈而使第一agv 14同邻近的agv耦合和解耦。接近度传感器68可以是例如激光接近度传感器、红外接近度传感器、多普勒效应接近度传感器、磁性接近度传感器、霍尔效应接近度传感器或一些其它合适的接近度传感器。
[0024]
图3是图2的agv 14的侧视图。如所示出的,agv 14包括前部缓冲器66、两个侧部缓冲器71、72(由于所说明的视角而仅示出一个)以及后部缓冲器74。如所示出的,接近度传感器68可以设置于在所说明的侧部缓冲器71、72与前部缓冲器66和后部缓冲器74之间形成的边缘之间。
[0025]
图4是图2的agv 14的自顶向下的视图。如所示出的,agv 14包括由前部缓冲器66、后部缓冲器74以及两个侧部缓冲器71、72(例如,四个外侧)形成的基本上矩形的缓冲器形状23。接近度传感器68设置于基本上矩形的缓冲器形状23的四个拐角69处。如所示出的,两个磁体25设置于前部缓冲器66、第一侧部缓冲器71、第二侧部缓冲器72以及后部缓冲器74中的每个上。前部缓冲器66上的磁体25以一距离隔开,该距离等于磁体25在后部缓冲器74上隔开的距离、等于磁体25在第一侧部缓冲器71上隔开的距离并且等于磁体25在第二侧部缓冲器72上隔开的距离。因而,所说明的第一乘坐交通工具14的四个缓冲器66、71、72、74中的任何可以耦合到其它乘坐交通工具(例如,图1的第二乘坐交通工具16、第三乘坐交通工具18、第四乘坐交通工具20、第五乘坐交通工具22以及第六乘坐交通工具24)的四个缓冲器中的任何。
[0026]
例如,图5是供图1的乘坐系统10之用的多个agv的可能的耦合操纵的实施例的自顶向下的视图。示出了包括第一agv 14、第二agv 16、第三agv 18、第四agv 20以及第五agv 22的五个agv,然而,在另一个实施例中,可以包括更多或更少的agv。如所示出的,第一agv 14基本上被第二agv 16、第三agv 18、第四agv 20以及第五agv 22环绕。箭头说明第一agv 14的前部缓冲器66能够如何磁性地耦合到第二agv 16的后部缓冲器74、第一agv 14的侧部缓冲器72能够如何磁性地耦合到第三agv 18的后部缓冲器74、第一agv 14的后部缓冲器74能够如何磁性地耦合到第四agv 20的后部缓冲器74以及第一agv 14的侧部缓冲器71能够
如何磁性地耦合到第五agv 22的前部缓冲器66。同样地,弯曲箭头示出第二agv 16的侧部缓冲器72能够如何磁性地耦合到第三agv 18的侧部缓冲器72、第三agv 18的侧部缓冲器72能够如何磁性地耦合到第四agv 20的侧部缓冲器71、第四agv 20的侧部缓冲器72能够如何磁性地耦合到第五agv 22的侧部缓冲器72以及第五agv 22的侧部缓冲器71能够如何磁性地耦合到第二agv 16的侧部缓冲器71。当然,agv 14的位置也能够被改变,使得例如agv 14、16、18、20、22中的任一个能够设置于所说明的实施例的中间,或使得所耦合的agv 14、16、18、20、22的不同的布置或累积的形状是可能的。更进一步,任何数量的agv 14、16、18、20、22可能被耦合或可能不被耦合,从而形成尺寸不同的交通工具集群或群组。即,agv 14、16、18、20、22能够磁性地耦合,以除了其它配置改变之外,还形成不同群组、不同顺序以及不同取向。
[0027]
图6
‑
11说明按照其乘坐交通工具被磁性地耦合和解耦以形成各种配置的乘坐序列的实施例的透视图。为了简单起见,乘坐交通工具在下文中被称为agv。而且,为了使附图和对应的描述简化,所说明的agv(特别地,磁体)的许多的编号的方面未在图6
‑
11中编号。
[0028]
在图6中,第一agv 14并排地磁性地耦合到第二agv 16,第三agv 18并排地磁性地耦合到第四agv 20,并且,第五agv 22并排地磁性地耦合到第六agv 24。而且,第六agv 24前部到后部地磁性地耦合到第四agv 20,第五agv 22前部到后部地磁性地耦合到第三agv 18,第四agv 20前部到后部地磁性地耦合到第二agv 15,并且,第三agv 18前部到后部地磁性地耦合到第一agv 14。因而,第一agv 14、第二agv 16、第三agv 18、第四agvc 20、第五agv 22以及第六agv 24形成具有三行和两列的六交通工具式集群。在图中7,所述行彼此磁性地解耦。例如,第一agv 14与第三agv 18磁性地解耦,第二agv 16与第四agv 20磁性地解耦,第三agv 18与第五agv 22磁性地解耦,并且,第四agv 20与第六agv 24磁性地解耦。即,agv磁性地解耦以形成三个二交通工具式集群。磁性解耦可以涉及例如控制agv 14、16、18、20、24的磁体,使得磁体不会彼此磁性地吸引,并且,在一些实施例中,使得磁体彼此排斥。如先前所描述的,磁体可以是由控制系统(例如,图1的控制系统26)控制的电磁体,并且,一个或多个磁体的极性可以通过使通过磁体的电流反向而改变。另外或备选地,可以使用条形磁体或类似磁体,并且,所述条形磁体或类似磁体可以是可旋转的,从而使能相反的极性从交通工具面朝外。
[0029]
在图8中,第一agv 14与第二agv 16磁性地解耦,第三agv 18与第四agv 20磁性地解耦,并且,第五agv 22与第六agv 24磁性地解耦。因而,在图8中,agv 14、16、18、20、22、24中的每个与磁性耦合无关地被操纵。
[0030]
图9和图10包括在彼此解耦时正独立地被操纵的agv 14、16、18、20、22、24的透视图。agv 14、16、18、20、22、24可以由控制系统(例如,图1的控制系统26)操纵。如图10中所示出的,agv 14、16、18、20、22、24可以朝向使能其进一步耦合的位置被操纵。图11是磁性地耦合以形成三个二交通工具式集群的agv 14、16、18、20、22的透视图。即,第一agv 14并排地磁性地耦合到第四agv 20,第二agv 16并排地磁性地耦合到第五agv 22,并且,第三agv 18并排地磁性地耦合到第六agv 24。应当注意到,图11中的配对不同于图7中的那些配对。而且,所说明的对可以类似于图6而前部到后部地被耦合,并且,前部到后部的配对也可能不同于图6中所示出的前部到后部的配对。图6
‑
11说明根据所公开的实施例的有可能的一种类型的乘坐执行,然而,其它乘坐执行也是可能的。例如,agv 14、16、18、20、22、24可以磁性
地耦合,从而如图5中所说明的那样面向不同方向(例如,从而改变其取向),并且从而形成不同的数量和尺寸的交通工具集群。
[0031]
在图12
‑
17中说明图1的乘坐系统10的可能的乘坐执行的实施例的另一个示例。图12是被耦合成八交通工具式集群的图1的乘坐系统的agv的透视图。为了使附图和对应的描述简化,所说明的agv(特别地,磁体)的许多的编号的方面未在图12
‑
17中编号。
[0032]
图12中的说明包括第一agv 14、第二agv 16、第三agv 18、第四agv 20、第五agv 22、第六agv 24、第七agv 100以及第八agv 102。agv 14、16、18、20、22、24、100、102并排地并且后部到前部地被耦合,以形成具有四行和两列的八交通工具式集群。还在图12中说明演出元素40、42。第一演出元素40包括第一矩形底座41,并且,第二演出元素42包括第二矩形底座43。演出元素40的矩形底座41、演出元素42的矩形底座43分别可以被磁化或以其他方式能够耦合到agv 或乘坐交通工具磁体。在图13和图14中,agv 14、16、18、20、22、24、100、102已被磁性地解耦,并且正接近演出元素40、42,并且,第一agv 14和第二agv 16分别磁性地耦合到演出元素40的矩形底座41、演出元素42的矩形底座43,其中,第三agv 18和第四agv 20接近磁性耦合到矩形底座41、43。图15是乘坐系统的透视图,由此,所有的八个agv 14、16、18、20、22、24、100、102都分别磁性地耦合到演出元素40的矩形底座41、演出元素42的矩形底座43。如所示出的,第一agv 14的后部缓冲器、第四agv 20的后部缓冲器、第五agv 22的后部缓冲器以及of第八agv 102的后部缓冲器磁性地耦合到第一演出元素40的矩形底座41,而第二agv 16的前部缓冲器、第三agv 18的前部缓冲器、第六agv 24的前部缓冲器以及第七agv 100的前部缓冲器磁性地耦合到第二演出元素42的矩形底座43。当然,各种agv 14、16、18、20、22、24、100、102的不同缓冲器可以分别并且按不同顺序耦合到演出元素40的矩形底座41、演出元素42的矩形底座43中不同的一个。而且,在某些实施例中,agv 14、16、18、20、22、24、100、102中的仅某些可以耦合到演出元素40、42。如先前所描述的,agv 14、16、18、20、22、24、100、102之间的模块化关系和侧部的模块本质以及agv 14、16、18、20、22、24、100、102中的特定的一个的对应的磁体使能与乘坐交通工具(例如,agv 14、16、18、20、22、24、100、102)的行进方向、分组(例如,尺寸和匹配)、取向、分离距离等等的相关的许多的可动态地调整的乘坐配置。
[0033]
图18是说明操作图1的乘坐系统的方法200的实施例的过程流程图。在所说明的实施例中,方法200包括使乘坐交通工具磁性地耦合(框202)以形成第一乘坐配置。如先前所描述的,乘坐交通工具可以各自包括一个或多个磁体,例如,沿着乘坐交通工具的外部设置或暴露的若干磁体。乘坐交通工具可以以诸如在上文中示出并且关于图5
‑
17而描述的各种方式被耦合。乘坐交通工具可以后部到后部地、侧部到侧部地、前部到前部地或前部到后部地被磁性地耦合。乘坐交通工具可以被磁性地耦合成任何数量的乘坐交通工具的群组或集群。群组或集群可以沿类似方向或不同的方向行进,并且可以彼此不同地被取向或耦合。在一些实施例中,接近度传感器可以使能控制系统来确定和/或促进适当的耦合。例如,来自接近度传感器的传感器反馈可以使能控制系统来确定哪些乘坐交通工具的哪些磁体彼此邻近并且将磁体和对应的乘坐交通工具一起引导成磁性地耦合的接合。如先前所描述的,磁体可以在没有互锁机构的情况下耦合,由此使能乘坐交通工具不必停止或基本上减速就磁性地耦合在一起。
[0034]
方法200还包括使乘坐交通工具中的至少某些磁性地解耦(框204)以形成与第一
乘坐配置不同的第二乘坐配置。例如,如先前所描述的,所耦合的乘坐交通工具的集群可以被解耦或被部分地解耦,使得乘坐交通工具或乘坐交通工具的较小集群能够与先前的较大集群无关地操纵。在其中磁体为电磁体的实施例中,解耦可以通过消除通过磁体的电流并且使能乘坐交通工具(例如,通过控制系统的帮助)沿不同方向远离彼此而操纵来启动。而且,在某些操纵中,电流可以被反向以引起电磁体改变极性,这可以促进邻近的乘坐交通工具的两个磁体之间的磁性排斥。磁性排斥可以被利用来使乘坐交通工具解耦和/或引起乘坐交通工具的移动。磁性排斥还可以通过利用可旋转的条形磁体来实现,可旋转的条形磁体基于由控制系统做出的控制命令而旋转以引起磁体从交通工具面朝外的部分的极性的改变。
[0035]
方法200还包括使至少某些其它乘坐交通工具磁性地耦合(框206)以形成与第一乘坐配置和第二乘坐配置不同的第三乘坐配置。例如,如在上文中关于图6
‑
11中所说明的乘坐序列而描述的,乘坐交通工具可以在乘坐设备中的第一点处在与交通工具行进顺序、交通工具集群尺寸或形状、交通工具匹配、行进方向等等相关的第一配置下磁性地耦合,并且可以在乘坐设备中的第二点处在与交通工具行进顺序、交通工具集群尺寸或形状、交通工具匹配、行进方向等等相关的第二配置下磁性地耦合,其中,第二配置在至少一个方面不同于第一配置。
[0036]
方法200还包括使演出元素磁性地耦合(框208)到至少某些乘坐交通工具以形成与第一配置、第二配置以及第三配置不同的第四乘坐配置。例如,如先前关于图12
‑
17中所说明的乘坐序列而描述的,乘坐交通工具可以被控制以朝向沿着乘坐路径就位的各种演出元素操纵并且磁性地耦合到所述演出元素。乘坐交通工具还可以被控制以与演出元素磁性地解耦并且继续沿着乘坐路径。
[0037]
根据本公开,本乘坐系统包括可控制以使能乘坐系统及其乘坐交通工具的改进的配置的乘坐交通工具。至少部分地由于乘坐交通工具可以是模块化的,可以包括沿着每个乘坐交通工具的若干外表面设置的磁体,并且可以沿各种方向是可操纵的,并且不要求对物理轨道的粘附,因而乘坐交通工具配置能够沿着乘坐路径动态地改变。例如,如先前所描述的,交通工具行进方向可以被改变,交通工具取向可以被改变,乘坐交通工具的分组可以被改变,交通工具行进顺序(例如,相对于沿着乘坐路径的参考点,诸如,乘坐路径的起点或末端)可以被改变,单独的乘坐交通工具或乘坐交通工具群组(例如,“集群)之间的距离可以被改变,与乘坐系统的演出元素的交互可以被启动等等。
[0038]
虽然只有某些特征在本文中已被说明和描述,但本领域技术人员将想到许多修改和改变。因此,将理解到,所附权利要求旨在涵盖如落入本公开的真实精神内的所有这样的修改和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1