臂构造和人型玩具的制作方法
臂构造和人型玩具
1.本技术是申请日为2019年05月17日、申请号为201910410130.5、发明名称为“臂构造和人型玩具”的申请的分案申请。
技术领域
2.本发明涉及一种玩具的臂构造。
背景技术:
3.公知有一种这样的玩具:使用者能够将按部位区分开的部件组装起来以进行成形,取得各种姿势来进行游戏。例如,在专利文献1中公开了一种如下这样的人型玩具的结构,即:采用利用固定于腰部内的侧部的前后方向轴将连结腿部的球接头(与人体的大腿关节相当)支承为能够摆动的构造,通过改变左右的球接头的间隔,能够兼顾直立姿势和动态的开腿姿势。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2009-34232号公报
技术实现要素:
7.发明要解决的问题
8.作为玩具设计的主题之一,具有出现在漫画、电视动画中的大型人型机器人。在被设计为人型机器人的人型玩具中,大都采用以被装甲覆盖的西洋骑士为主题的设计。在该情况下,被设计为像肌肉发达的身体隐藏在其中那样的流丽且强壮的形态。例如,臂、腿部具有像人的肌肉隆起那样的轮廓,以强调强壮度。
9.并且,使用者在购入这样的人型玩具时一定会试图使其摆出漫画、电视动画中出现的“决定姿势”、“亮相姿势”。例如,在出击前的停机坪(人型机器人的停靠场),将步枪那样的较长的装备以该装备的长度方向沿着臂的姿势单手保持并叉腿站立的“出击前姿势”也可以说是其中之一。
10.然而,人型玩具的造型如实地再现原作的战斗机器人的设计,因此可动部位的可动容易变得不自由。
11.例如,在着眼于手部(是指比手腕靠前的部分)的部件时,手腕的可动部位较少,手腕的可动范围也存在界限。因此,例如,为了实现叉腿站立的决定姿势,即使想要使步枪的长度方向沿着臂的方向地装备,枪托部分也会与前臂部干涉,而出现无法向手部装备步枪这样的情况。
12.无法再现像出击前姿势那样的特定决定姿势这样的问题并不限定于人型玩具,不管玩具整体的设计是人型还是除人形以外的形状,都是同样的。例如,即使是动物、昆虫、想象中的生物、机器人、交通工具等,只要是具有臂构造的设计,都是同样的。
13.本发明的主要课题在于提供一种能够使具有臂构造的玩具再现特定装备品安装
于臂构造的特定姿势的技术。
14.用于解决问题的方案
15.本发明的技术方案是一种玩具的臂构造,包括:手部,其能够以把持比该手部的全长长的装备品的方式安装该装备品;以及前臂部,其具有用于支承所述手部的支承部,能够将所述支承部变更至第1位置和在所述装备品安装于所述手部的情况下相比所述第1位置而言能够减少所述装备品与所述前臂部之间的干涉的第2位置。
16.也可以是,所述前臂部支承所述支承部,并具有能够改变所述前臂部的长度的滑动部,所述第2位置是这样的位置:通过使所述滑动部滑动而使所述前臂部的长度比在所述第1位置时所述前臂部的长度长。
17.另外,也可以是,还包括连接部,该连接部的一端侧具有与所述手部连接的连接构造,另一端侧具有与所述支承部连接的连接构造,从而能够改变所述手部相对于所述支承部的角度及姿势地将所述手部与所述支承部连接。
18.另外,也可以是,所述前臂部具有用于锁定所述滑动部的滑动位置的锁定部。
19.另外,也可以是,所述锁定部设于所述前臂部的外饰部。
20.另外,也可以是,所述前臂部能够通过改变所述支承部的支承角度而变更为直线状形态和弯曲状形态,所述第1位置是形成所述直线状形态的位置,所述第2位置是形成所述弯曲状形态的位置。
21.另外,也可以是,所述装备品是模仿具有枪托的枪支的部件。
22.另外,还能够构成具有上述的臂构造的人型玩具。
附图说明
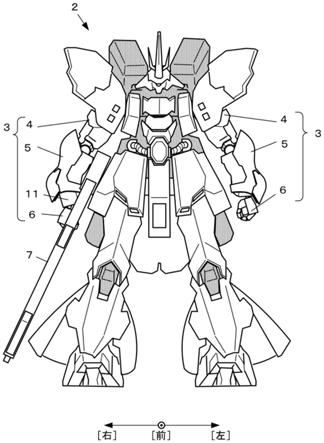
23.图1是本实施方式的人型玩具的前面外观图(正面外观图)。
24.图2是用于说明以往的人型玩具的问题的图。
25.图3是用于说明以往的人型玩具的问题的图。
26.图4是简略地图示了臂构造的构造的图。
27.图5是用于说明改变支承部的位置的步骤的图。
28.图6是比较支承部的位置不同时的特定装备品的安装状态的图。
29.图7是表示人型玩具的臂构造的详细的构成例的主视图,是表示支承部移动至第2位置的状态的图。
30.图8是表示从图7的状态卸下了锁定操作用可动外饰部和固定外饰部的状态的图。
31.图9是表示从图8的状态卸下了前臂基部的跟前侧的构件的状态的图。
32.图10是表示锁定操作用可动外饰部与连结部的构成例的主视图。
33.图11是表示滑动部(轴支承部和支承部)的构成例的主视图。
34.图12是表示滑动部(轴支承部和支承部)的构成例的立体图。
35.图13是使人型玩具摆出出击前姿势的主视图。
36.图14是表示手部的变形例的立体图。
37.图15是表示使用了图14的手部时的支承部移动至第2位置的状态的图。
38.附图标记说明
39.2、人型玩具;3、臂构造;4、上臂部;5、前臂部;6、6b、手部;6ba、基部部件;6bb、连接
部;7、特定装备品;10、滑动部;11、支承部;12、轴支承部;14、前臂基部;16、外饰部;16a、锁定操作用可动外饰部;16b、固定外饰部;16c、连结部;17、滑动销;18、滑动板;20、滑动机构部;21、滑动引导件;22、滑动销;30、摆动机构部;31、摆动轴;32、轴孔;40、锁定部;41、第1锁定孔;42、第2锁定孔;43、锁定销;47、引导孔;48、引导槽;60、球接头;61、螺柱;62、安装凹部;63、插口;64、连接轴;65、连接筒部;66、杆部;70、枪口;71、枪把;72、枪托。
具体实施方式
40.图1是作为应用本发明的实施方式的一例的人型玩具的前面外观图(正面外观图)。另外,为了便于理解,局部通过阴影表示。另外,图中的箭头的方向标注表示相对于人型玩具2而言的前后左右。
41.人型玩具2是这样的玩具:具有以电视动画、漫画为原作的模仿人型机器人的设计,通过将按部位区分开的的部件组装起来而作成。人型玩具2具有以被装甲覆盖的西洋骑士为主题的设计,臂构造3、腿构造具有就像肌肉发达的身体隐藏在其中那样的流丽且强壮的形态。如果进一步着眼于细节部分,则利用粗实线示出了轮廓的臂构造3具有上臂部4、前臂部5和手部6(是指比手腕靠前的用于把持东西的部位)。在直立时前臂部5的与躯干相对的部位被实施了像人的肌肉隆起那样的设计,显得比普通人的前臂部粗很多。
42.手部6为握拳形状的一体成形品,具有实现手腕可动部的球接头的螺柱61。手部6形成有5根手指的形态,但它们不能活动。在手部6,为了能够以把持的方式安装装备品(与人型玩具2的主体分开准备的部件;作为装扮要素准备的部件),而设有供该装备品的凸部插入、嵌装的截面为多边形状(例如,在从插入方向进行观察时为矩形)的安装凹部62。
43.装备品包括模仿步枪、反坦克火箭炮等较长的武器的设计的特定装备品7。对于图1所示的特定装备品7,为了便于理解整体设计,而有目的地通过侧视图进行了图示。
44.特定装备品7的全长至少比手部6的全长长,在比要插入安装凹部62的枪把71靠后方的位置具有枪托72。在出现人型玩具2为模型的人型机器人的原作中,在出击前的停机坪(日文:
ハンガー
),利用右手单手保持该特定装备品7并以叉腿站立的决定姿势、所谓的出击前姿势待机,能够连同雄壮的bgm(背景音乐)一起描画出好多次帅气地出击的场面。对于人型玩具2的使用者而言,在对其进行装饰时想使其摆出出击前姿势。
45.但是,在以往的人型玩具的臂构造的情况下,即使以使手部6把持特定装备品7那样的较长的部件的方式进行安装,想要摆出出击前姿势,也无法实现。
46.图2是利用人型玩具2说明以往的人型玩具的问题用的右臂的主视图。图3是在朝向正面时从右侧观察图2中的右臂而得到的侧视图。
47.另外,本实施方式的人型玩具2的左右的臂构造3左右对称,因此,在以下的说明中,以右臂的臂构造3为代表进行说明,省略对于左臂的图示、说明。
48.仅通过图2的主视图是难以理解的,但如果将图3作为参考则可知,在以往的人型玩具的情况下,即使想要从臂构造部3的跟前侧将特定装备品7的枪把71安装于手部6,也无法靠近。如图3中单点划线所示,为了摆出原作那样的出击前姿势,必须使臂构造3为沿着特定装备品7的长度方向伸长的状态,并且将特定装备品7的枪把71安装于手部6的安装凹部62,并且使枪托72位于前臂部5的内侧(躯干侧)。
49.但是,在以往的人型玩具的情况下,会发生干涉部位,无法摆出原作那样的出击前
姿势。具体而言,例如,先做成使臂构造3沿着特定装备品7的长度方向伸长的姿势,在该姿势的状态下试图向手部6安装特定装备品7的枪把71。为了使臂构造3为伸长的姿势,而使手部6以球接头60的螺柱61为支点向外侧旋转,但如图2中的白色箭头所示,手部6会与外饰部件接触,因此该旋转具有界限。并且,如果在该姿势的状态下试图向手部6安装特定装备品7的枪把71,则如图2、图3中的阴影箭头所示,枪托72的下端与前臂部5的正面侧相干涉,而无法安装。
50.对能够实现出击前姿势的本实施方式的臂构造3进行说明。
51.图4是简略地图示了本实施方式的臂构造3的构造的图,局部以截面示出。本实施方式的臂构造3的前臂部5具有:支承部11,其利用球接头与手部6连接;轴支承部12,其将支承部11轴支承为能够摆动;以及前臂基部14,其将轴支承部12支承为能够滑动。并且,前臂部5的外侧利用覆盖它们中的至少一部分的外饰部16覆盖。
52.前臂基部14在一端侧(图4中的上端侧)具有与上臂部4连结的连结构造部,在另一端侧(图4中的下端侧)借助滑动机构部20支承轴支承部12。
53.滑动机构部20是通过设于前臂基部14的沿着前臂部5的长度方向的滑动引导件21与突出设置于轴支承部12的一端侧(图4中的上端侧)的滑动销22之间的卡合而实现的。
54.另一方面,在轴支承部12的另一端侧(图4中的下端侧),支承部11借助摆动机构部30支承为能够摆动。
55.摆动机构部30是通过突出设置于轴支承部12的摆动轴31与设于支承部11的一端侧(图4中的上端侧)的轴孔32嵌合而实现的,将支承部11支承为能够在臂构造3的内外方向(远离人型玩具2的躯干部的方向;图4中的左右方向)上摆动。另外,摆动轴31和轴孔32被设定为能够维持摆动的姿势的适当的嵌合关系。
56.另外,在支承部11的另一端侧(图4中的下端侧)设有与手部6的螺柱61嵌合的插口63。即,支承部11和轴支承部12利用球接头60连接。
57.支承部11和轴支承部12构成支承手部6且相对于前臂基部14一体地滑动的滑动部10,前臂部5的长度能够变更。并且,通过使支承部11相对于轴支承部12摆动,从而前臂部5能够通过改变支承部11的支承角度而变更为直线状形态和弯曲状形态。
58.另外,前臂部5具有用于锁定滑动部10的滑动位置的锁定部40。锁定部40是通过突出设置于轴支承部12的锁定销43与设于外饰部16的第1锁定孔41或第2锁定孔42之间的卡合而实现的。
59.第1锁定孔41被设于在轴支承部12靠近前臂基部14的状态、即前臂部5最短的状态下与锁定销43嵌合的位置。第2锁定孔42被设于在轴支承部12最大程度远离前臂基部14的状态、即前臂部5最长的状态下与锁定销43嵌合的位置。
60.图5是用于说明改变支承部11的位置的步骤的图。在向人型玩具2安装特定装备品7时,按图5的(1)
→
图5的(2)
→
图5的(3)
→
图5的(4)的顺序进行操作。
61.具体而言,在没安装特定装备品7的状态下,如图5的(1)所示,支承部11位于“第1位置”。此时,前臂部5最短且为直线状形态。之后,为了安装特定装备品7,首先,挪动或卸下外饰部16,解除第1锁定孔41与锁定销43之间的卡合,从而解除锁定部40。由此,滑动机构部20变得可动。
62.接着,如图5的(2)所示,将轴支承部12自前臂基部14拉出,使前臂部5为最长的状
态。接着,如图5的(3)所示,使支承部11相对于轴支承部12向前臂部5的内侧方向摆动。由此,前臂部5成为最长且弯曲状形态,支承部11移动至第2位置,该第2位置为在特定装备品7安装于手部6的情况下相比第1位置而言特定装备品7与前臂部5不干涉的位置。第2位置为相比第1位置而言特定装备品7与前臂部5不易干涉的位置,也能够称作相比第1位置而言能够减少特定装备品7与前臂部5之间的干涉的位置。
63.并且,最后,在使被挪开或卸下了的外饰部16返回到原来的位置时,第2锁定孔42与锁定销43嵌合,锁定部40被锁上,滑动机构部20变得无法移动。由此,即使将人型玩具2倒置、改变臂构造3的姿势,也不会因特定装备品7的重量等而无意地使前臂部5缩短。
64.图6是比较支承部11的位置不同时的特定装备品7的安装状态的图。图6的左侧表示支承部11位于第1位置的状态,图6的右侧表示支承部11位于第2位置的状态。在支承部11位于第1位置的状态下,即使利用球接头60(参照图4)尽可能地调整手部6的角度(手腕的角度),也无法避免特定装备品7的枪托72与前臂部5干涉,而无法再现原作的出击前姿势。但是,如果使支承部11移动至第2位置,则能够再现原作的出击前姿势。
65.在装备除特定装备品7以外的装备品(例如,要安装于安装凹部62的部位位于末端部的装备品(例如,光束刀、剑等)、比枪把靠后方的部位不存在或者较短的手枪等装备品等)的情况下,只要使支承部11从第2位置返回到第1位置即可。
66.另外,在使支承部11从第2位置向第1位置返回时,只要参照图5按以上说明的相反步骤进行操作即可。
67.接着,对更具体的结构进行说明。
68.图7是表示本实施方式的人型玩具2的臂构造3的详细的构成例的主视图,示出了支承部11移动至第2位置的状态。另外,为了使构造的理解容易,而省略了一部分部件的图示。
69.人型玩具2的前臂部5的外饰部16包括锁定操作用可动外饰部16a和固定外饰部16b,被设计为主要覆盖臂的外侧(图7中的右侧)。锁定操作用可动外饰部16a是向臂的外侧凸出的一部件,固定外饰部16b包括前后两构件(是指分为图7的跟前侧部件和里侧部件这两部件的结构)。
70.前臂基部14包括前后2构件(14f、14r),在使前后对准时成为内部设有滑动引导件21(参照图4)等的大致筒状体。
71.图8是表示本实施方式的人型玩具2的臂构造3的构成例的主视图,示出了将锁定操作用可动外饰部16a和固定外饰部16b卸下的状态。图9是表示进一步将前臂基部14的跟前侧的构件卸下的状态的图。
72.锁定操作用可动外饰部16a具有连结部16c,在完成状态的人型玩具2中,锁定操作用可动外饰部16a和连结部16c连结固定,作为一体的部件发挥作用。
73.图10是表示锁定操作用可动外饰部16a与连结部16c的构成例的主视图。连结部16c是用于使锁定操作用可动外饰部16a与滑动部10卡合的部件,在正面侧突出设置有滑动销17,在背面侧突出设置有滑动板18。滑动销17和滑动板18以分别同沿着与滑动部10的滑动方向相交叉的方向开设的引导孔47、引导槽48动配合的方式组装(参照图8、图9)。由此,锁定操作用可动外饰部16a能够从前臂部5向外侧方向(朝向图8、图9中的右侧)滑动,以进行锁定部40的锁上/开锁操作,但基本上不会脱离前臂部5。
74.并且,在连结部16c与轴支承部12相对的相对面凹设有第1锁定孔41和第2锁定孔42。
75.图11是表示滑动部10(轴支承部12和支承部11)的构成例的主视图。图12是立体图。
76.图13是使人型玩具2摆出出击前姿势的主视图。左右的臂构造3都能够应用上述的本实施方式的结构。在图13中,将右臂的臂构造3的支承部11变更至第2位置来装备特定装备品7。左侧的臂构造3的支承部11保持处于第1位置的状态。
77.以上,根据本实施方式,对于具有臂构造的玩具,能够不会导致原作设计的再现失败地再现使用了特定装备品的部件的原作那样的装备状态。更具体而言,能够再现沿着与前臂相当的部位的内侧装备的比较长的特定装备品以该装备品的长度方向沿着臂的方式装备的姿势。
78.另外,能够应用本发明的实施方式并不局限于上述的例子,能够在不改变发明要旨的范围内适当地进行构成要素的追加、省略、变更。
79.例如,在上述实施方式中,作为玩具的例子,列举了人型玩具,但并不局限于人型,动物、鸟类、昆虫、甲壳类等只要是具有与臂构造相当的部位的玩具,就能够应用本发明。此时,与上述实施方式的臂构造相当的部位的称呼可以不是臂。例如,可以是腿、触手、尾巴、机械手等。而且,此时,对于手部6的设计,只要能够安装装备品即可,也可以是不具有5根手指的设计。
80.另外,作为特定装备品7,例示了步枪,但装备品的设计并不局限于枪支,能够适当地设定。
81.另外,滑动机构部20(参照图4)被例示为使用了销引导件(日文:
ピントガイド
)的直线运动机构,但只要能够使支承部11相对于由前臂基部14和外饰部16作成的筒状的外皮构造突出/收纳地移动即可,也能够替换为其他构造。例如,也可以利用波纹构造、螺纹构造等替换。
82.另外,手部6被描述为握拳形状的一体成形品,但也可以设置几个可动部。例如,也可以是具有5根手指的手部,该5根手指具有手指关节构造。
83.另外,例如,也可以如图14所示的手部6b那样为具有安装凹部62的基部部件6ba(与5根手指和手掌部分相当)和具有球接头的螺柱61的连接部6bb(与手臂部分相当)的两构件构造。
84.连接部6bb在杆部66的一端侧具有作为与手部6b的基部部件6ba连接的连接构造的连接筒部65,在另一端侧具有螺柱61(与支承部11(参照图4)连接的连接构造)。连接筒部65与基部部件6ba的连接轴64嵌合,被连接为能够摆动。摆动轴线利用图14中的单点划线示出。
85.由此,能够改变手部6b相对于支承部11的角度及姿势。即,对于手部6b,能够以连接部6bb为基准使基部部件6ba向手掌方向或反方向转动。
86.图15是表示使用了手部6b的人型玩具2的臂构造3的详细的构成例的主视图,示出了支承部11移动至第2位置的状态。由于能够改变手部6b相对于支承部11的角度及姿势,因此即使将杆部66设定为比上述实施方式短或者即使将螺柱61在支承部11上的位置更靠躯干侧地设定,也能够取得适合向手部6b装备特定装备品7的位置和姿势。即,能够使人型玩
具2摆出原作那样的出击前姿势。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1