一种基于单目相机的测量田赛投掷项目投掷数据的方法与流程
1.本发明属于体育田径项目的训练和比赛裁判领域,尤其涉及一种基于单目相机的测量田赛投掷项目投掷数据的方法。
背景技术:
2.田赛投掷类项目主要包括实心球、铅球、铁饼、标枪、链球等,无论是在竞技类运动中,还是在业余运动中,都是非常普及的运动项目。
3.在田赛投掷类运动的比赛和训练中,存在着以下的两个问题:
4.1.在测量投掷距离时,传统的方法是使用皮尺用人工的方法进行测量,这种测量方式,裁判需要时刻盯着器械的第一落点,容易产生误差,也缺乏客观性,且测量过程需要时间,效率较低,测试节奏较慢。在标枪和链球项目中,落点区域是危险区域,测量人员需要提高警惕,标枪和链球伤人的事件也时有发生。
5.2.为了达到较好的成绩,投掷的高度、角度和初速度是非常重要的指标,但是在投掷类项目训练时,对于这几项指标往往缺乏数据,因而不能使训练有针对性地进行,训练比较盲目。
6.针对上述的第一个问题,目前已经有了一些新的技术方案来解决,比如申请号为201621254935.3的实用新型专利“掷实心球测试仪”,该方案使用置于场地两边的两个测试杆,用发送和接收红外信号的方法,捕捉到实心球落地瞬间的位置,从而投掷距离进行测量,该方法自动程度高,实时性高,为上面的第一个问题提供了一种解决方案,目前市场上的掷实心球测试仪产品基本上都是基于这一技术原理。但是,该方案存在以下的问题:
7.1.测量精度低,上述掷实心球测试仪的测试精度在10厘米左右,精度过低。
8.2.成本较高,一台上述的掷实心球测试仪市场售价在1万多元至几万元之间,不利于进行推广和普及。
9.3.测试杆长数米,且测试杆和主机都需要定时充电,整套设备在搬运、存储、维护方面代价较大。
10.4.上述掷实心球测试仪的测试范围有限,对于标枪,链球,铁饼等落地范围比较大的项目无能为力。
11.5.上述掷实心球测试仪只能测量投掷距离,不能测量起掷高度、起掷角度和起掷速度等数据,因而不能解决上述的第2个问题。
12.申请号为202110375052.7的发明专利“一种基于图像处理的测量田径投掷类项目投掷距离和跳远类项目跳远距离的方法”公开了解决上述问题的另一种方法。但是该方法存在如下的问题:
13.1.该方法需要对相机参数进行标定。虽然申请号为202110375193.9的发明专利“一种适用于田径测距的相机标定方法”提供了一种简单的标定方法,但是标定过程仍然比较麻烦,从而使整个方法在操作上较为繁琐。
14.2.该方法同样只能测量投掷距离,不能测量起掷高度、起掷角度和起掷速度等数
据,因而不能解决上述的第2个问题。
技术实现要素:
15.本发明提出了一种基于单目相机的测量田赛投掷项目投掷数据的方法,该方法相比现有技术相比有以下的优势:
16.1.整个测量过程仅仅使用单台相机架设在场边即可完成视频数据采集,成本低廉,操作方便。
17.2.可以用普通的手机代替专业相机,用手机上的相机进行视频采集,并用手机进行测量结果的计算,使得成本更加低廉,使用更加方便。
18.3.用非常简单的方法对相机参数进行标定,整个方法步骤简单,操作方便,并且用户可以随意地更换手机。
19.4.测量精度较高,测量精度能达到4厘米左右,虽然与申请号为202110375052.7的发明专利“一种基于图像处理的测量田径投掷类项目投掷距离和跳远类项目跳远距离的方法”的精度略低,但是在一些精度要求不是特别高,而测量成本和操作方便性更加重要的场合,比如学校的实心球项目和铅球项目等,本方法是更合适的选择。
20.5.不仅能测量投掷距离,而且能测量起掷高度、起掷角度和起掷速度等数据,因而很好地解决了上述的第二个问题。
具体实施方式
21.本方法的具体实施方式是:整个测量过程分为校准和正式测量两个阶段,其中校准阶段在第一次使用时和后续的使用中是有区别的,而正式测量阶段每次使用都相同。
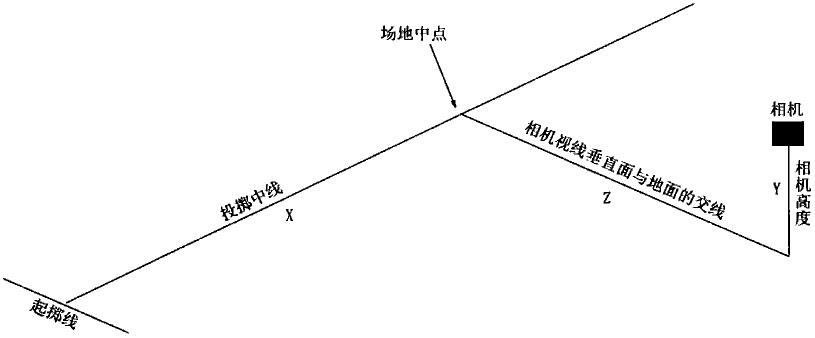
22.图1为对校准阶段的具体步骤行说明。
23.第一次使用时的校准阶段的详细步骤如下:
24.1.将相机(手机)用支架架设在投掷场地的场边,调整相机的左右、前后和上下三个方向的位置,使取景范围恰当。同时调整相机取景的角度,确保视线的上下方向保持水平,视线的左右方向保持与投掷中线垂直(视线的垂直面与投掷中线的交点称为场地中点),并且相机本身保持水平。
25.2.相机取景框中有一个参考点,参考点在照片中的位置已知,上述调整过程中要求场地中点与该参考点重合。
26.3.上述调整过程完成后,用人工的方法测量如下的三个数据:
27.1)起掷线到场地中点的距离x。
28.2)场地中点到相机支架的水平距离z。
29.3)相机高度y。
30.将这三个数据输入到手机中,校准阶段完成。
31.在后续的使用中,校准阶段只需进行上述步骤的1,2两步,不需要进行第3步。
32.在正式测量阶段,相机持续工作,不需要人工的干预,捕捉到一次投掷之后,立刻计算出该投掷的相关数据,在屏幕上显示结果,进行语音播报,并且可以将数据发送给其它显示终端或者其它的数据服务器进行进一步的处理。
33.以下说明本发明计算投掷数据的方法。计算也分为两个阶段:在第一次使用时的
校准阶段结束时,计算相机的外参矩阵和内参矩阵;在正式测量阶段,计算每次投掷的投掷数据。
34.首先建立世界坐标系:它是三维坐标系,以地面为x-z平面,投掷点为坐标系原点,投掷中线为x正方向,起掷线为z轴,z轴正方向为朝向相机的方向,垂直地面向上为y轴正方向。即x-y-z三个方向满足右手规则。
35.接下来建立相机坐标系:它是三维坐标系,以相机光心所在的位置为坐标系原点,左方向为x轴正方向,上方向为y轴正方向,视线方向为z轴负方向,x-y-z三个方向满足右手规则。
36.接下来建立视平面坐标系:它是二维坐标系,其原点位于相机坐标系(0,0,-1)的位置,x轴方向与相机坐标系相同,y轴方向与相机坐标系相同。
37.接下来建立照片坐标系:它是二维坐标系,其原点位于照片左上角,向右为x轴正方向,向下为y轴正方向。
38.在本发明的上述校准条件下,由于世界坐标系与相机坐标系之间的转换没有旋转分量,只有平移分量,所以由世界坐标系转换为相机坐标系的转换矩阵为:
[0039][0040]
其中的x,y,z是上面人工测量得到的三个值,是已知的。
[0041]
假设照片的宽为vw,高为vh,取景框中的参考点在x方向位于中点,所以它的x坐标为vw/2,设它的y 坐标为cy,这些值都是已知的。而场地中点在世界坐标系中的坐标是(x,0,0),也是已知的。
[0042]
将场地中点在世界坐标系中的坐标转换到相机坐标系下,得到:
[0043][0044]
再转换到视平面坐标系下,得到
[0045][0046]
其中c(1),c(2),c(3)分别是向量c的第1,第2,第3个分量。abs是取绝对值。
[0047]
假设相机的光心坐标为(vw/2,vh/2),相机的等效焦距是f。则相机的内参矩阵为
[0048]
[0049]
根据视平面坐标系与照片坐标系的映射关系,有
[0050][0051]
它是一个方程,里面只有一个未知数f,所以解这个方程就可以求得f的值,从而确定相机的内参矩阵k。这样,我们就计算出了相机的外参矩阵m和内参矩阵k,校准阶段的计算完成。(本发明不考虑相机的畸变参数,因而计算结果的精度会略微降低。)
[0052]
在正式测量阶段,对于每一次投掷,根据视频采集到的若干投掷轨迹点的坐标可以求得轨迹的方程,从而得到轨迹的相关数据。
[0053]
投掷器械(实心球,铅球等)在空中的飞行轨迹是一个有一定的起掷高度、起掷角度和起掷速度,仅受到重力和空气阻力的轨迹,该轨迹位于世界坐标系的x-y平面上,设起掷点在世界坐标系中的坐标为
[0054]
(0,yi,0),其中yi就是起掷高度,起掷速度在x方向的分量为v
xi
,在y方向的分量为v
yi
,因而起掷角度就是atan(v
yi
/v
xi
),起掷速度就是投掷器械受到的空气阻力由其终端速度v
t
决定。在上述条件下,x方向的加速度为
[0055][0056]
y方向的加速如为
[0057][0058]
其中g是重力加速度。
[0059]
在测试过程中,我们得到若干投掷轨迹点在照片坐标系中的坐标,将它们转换为世界坐标系坐标(z值为 0),由于v
x
是x对时间的导数,即v
x
=x
′
,vy是y对时间的导数,即vy=y
′
,a
x
是v
x
对时间的导数即x对时间的二阶导数,也就是a
x
=x
″
,ay是vy对时间的导数即y对时间的二阶导数,也就是ay=y
″
,所以可以建立微分方程组:
[0060][0061]
该微分方程组的初值是:
[0062][0063]
通过微分方程组的数值解法,就可以求得yi,v
xi
,v
yi
的值,并且可以得到轨迹在y值为0时的x坐标,该 x坐标就是投掷距离。问题得到解决。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1