一种前庭外周中枢康复训练仪的制作方法
1.本发明涉及医疗康复器材领域,具体是指一种前庭外周中枢康复训练仪。
背景技术:
2.眩晕是人体对空间关系的定向或平衡感觉障碍,是一种对自身或外界的运动错觉。眩晕病因复杂,涉及多学科知识,大致可以分为外后前庭疾病及中枢前庭疾病,而在治疗方面药物品种不多,非药物手段主要为前庭康复,前庭康复训练存在于为数不多的医院中,且大多在前庭康复室内大型设备,或者床边指导前庭康复训练动作为主,缺乏家庭实用便携的前庭康复训练仪器,导致患者在家不能得到专业治疗,延误病情。
3.目前,有一些前庭康复视频内容可供患者学习训练,但内容较复杂、繁琐,跟着视频做十分麻烦,另外,目前虽然出现了一些训练仪,但多为戴于头部或放置于训练者正前方进行训练的仪器,长时间的头部佩戴,十分不适;放置于训练者正前方的训练仪器则需要寻找合适的场地放置,十分不便。因此,研发一种多功能前庭康复训练仪帮助患者更快的恢复非常有必要,并且不需要头部佩戴或放置于训练者的正前方。
技术实现要素:
4.本发明要解决的技术问题是克服上述技术的缺陷,提供一种前庭外周中枢康复训练仪。
5.一种前庭外周中枢康复训练仪,包括底座,所述底座上设有下凹的安装弧,所述安装弧内设有安装环,所述安装环的一端连接有控制安装环转动的第一步进电机,所述第一步进电机固定于安装弧顶部一端,所述安装环内通过安装板设有五个第二步进电机,每个第二步进电机的输出端设有一个激光测距仪,五个所述第二步进电机的输出轴的轴线在同一水平面内,每个激光测距仪的计算起点距离对应的第二步进电机的输出轴的轴线垂直距离相同,每个所述第二步进电机的安装中心点在同一个圆上,其中一个第二步进电机的安装中心点设在圆的圆心处,其余四个上下左右分布在圆上,所述第一步进电机的输出轴的轴线与圆心处第二步进电机的安装中心点,圆心左右两侧第二步进电机的安装中心点在同一直线上,每个所述第二步进电机的安装中心点与对应的第二步进电机的输出轴轴线重合。
6.进一步地,所述底座与安装弧之间电动升降杆。
7.进一步地,所述升降杆为电动缸。
8.进一步地,所述底座底部设有吸盘。
9.进一步地,所述底座连接有为训练仪供电的电源线。
10.进一步地,所述训练仪内配置有控制系统,所述控制系统设在底座上,包括主控芯片模块,与主控芯片模块连接的步进电机控制模块、计时模块、语音模块、数据存储模块、数据传输模块、蓝牙模块;
11.所述步进电机控制模块包括对第一步进电机和五个第二步进电机的转动角度和
转动速度的控制模块;
12.所述计时模块为计时器;
13.所述语音模块为扬声器。
14.进一步地,所述数据存储模块为usb接口传输。
15.进一步地,所述控制系统还设有无线通讯模块,所述数据传输模块通过无线通讯模块实现。
16.本发明优点:本发明设计新颖,结构合理,可用于多种前庭康复训练模式,提高患者康复效果,可辅助于临床前庭康复研究;本发明方便摆放,避免了现有训练仪需佩戴于头部或放置在于训练者正前方的问题,同时保证多种训练模式的有效训练需求,使用效果好;设置无线通讯、数据传输功能,可将训练者的训练数据传输于医护数据中心,从而对前庭康复的临床科研提供量化信息。
附图说明
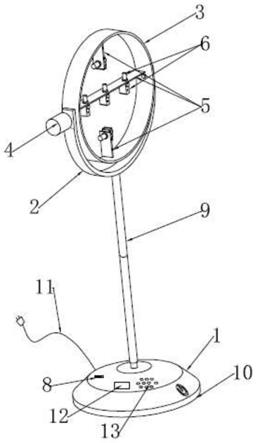
17.图1是本发明一种前庭外周中枢康复训练仪的立体示意图;
18.图2是本发明一种前庭外周中枢康复训练仪的控制流程示意图;
19.图3是本发明一种陆地冲浪板用适配器的激光测距仪的计算起点与对应的第二步进电机的输出轴的轴线垂直距离的计算示意图;
20.图4是本发明一种倾斜投射与墙面的实施方式示意图;
21.图5是图4形成上视点、中心视点和下视点个位置示意图;
22.图6是图4形成左视点、中心视点和右视点个位置示意图。
23.如图所示:1、底座;2、安装弧;3、安装环;4、第一步进电机;5、安装板;6、第二步进电机;7、激光测距仪;8、usb接口;9、电动升降杆;10、吸盘;11、电源线;12、计时器;13、扬声器。
具体实施方式
24.下面结合附图对本发明做进一步的详细说明。
25.一种前庭外周中枢康复训练仪,包括底座1,所述底座1上设有下凹的安装弧2,所述安装弧2内设有安装环3,所述安装环3的一端连接有控制安装环3转动的第一步进电机4,所述第一步进电机4固定于安装弧2顶部一端,所述安装环3内通过安装板5设有五个第二步进电机6,每个第二步进电机6的输出端设有一个激光测距仪7,五个所述第二步进电机6的输出轴的轴线在同一水平面内,每个激光测距仪7的计算起点与对应的第二步进电机6的输出轴的轴线垂直距离相同,每个所述第二步进电机6的安装中心点在同一个圆上,其中一个第二步进电机6的安装中心点设在圆的圆心处,其余四个上下左右分布在圆上,所述第一步进电机4的输出轴的轴线与圆心处第二步进电机6的安装中心点,圆心左右两侧第二步进电机6的安装中心点在同一直线上,每个所述第二步进电机6的安装中心点与对应的第二步进电机6的输出轴轴线重合。
26.所述底座1与安装弧2之间电动升降杆9,可控制个激光测距仪的高度。
27.所述升降杆9为电动缸。
28.所述底座1底部设有吸盘10,让设备放置更稳固。
29.所述底座1连接有为训练仪供电的电源线11。
30.所述训练仪内配置有控制系统,所述控制系统设在底座1上,包括主控芯片模块,与主控芯片模块连接的步进电机控制模块、计时模块、语音模块、数据存储模块、数据传输模块、蓝牙模块;
31.所述步进电机控制模块包括对第一步进电机4和五个第二步进电机6的转动角度和转动速度的控制模块;
32.所述计时模块为计时器12;
33.所述语音模块为扬声器13。
34.所述数据存储模块为usb接口8传输。
35.所述控制系统还设有无线通讯模块,所述数据传输模块通过无线通讯模块实现,控制系统通过无线通讯模块可连接手机app实现对本发明的控制。
36.底座1上粘贴二维码,方便使用者通过手机扫描获得与本发明的连接。
37.步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机,每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比,因此,步进电动机又称脉冲电动机,本发明充分利用步进电机的可操作性实现对激光投射点的位置控制。
38.激光测距仪是利用调制激光的某个参数实现对目标的距离测量的仪器,激光测距仪测量范围一般为3.5~5000米,在本发明的使用范围内。
39.如图3所示,每个激光测距仪7的计算起点与对应的第二步进电机6的输出轴的轴线垂直距离的计算示意图,其中:
40.l:每个激光测距仪的计算起点与对应的第二步进电机的输出轴的轴线垂直距离;
41.l1:激光测距仪计算器点到投影点的距离;
42.l2:对应第二步进电机的输出轴的轴线与投影点的距离;
43.l=l2
‑
l1。
44.实施例,人坐于沙发,训练仪倾斜投射激光点与墙面形成训练视点,人的正视时视线垂直于墙面
45.如图4所示,五个视点分别记为a1、上视点;b1、下视点;c1、左视点;d1、右视点;e1、中心视点;五个激光测距仪分别记为a2、上视点对应的激光测距仪;b2、下视点对应的激光测距仪;c2、左视点对应的激光测距仪;d2、右视点对应的激光测距仪;e2、中心视点对应的激光测距仪。
46.如图5和图6所示,为各视点的计算示意图
47.初始状态各个激光测距仪的发射光线均与各个第二步进电机6输出轴主线所在的同一平面垂直,由于每个所述第二步进电机6的安装中心点在同一个圆上,其中一个第二步进电机6的安装中心点设在圆的圆心处,其余四个上下左右分布在圆上,因此,长度a2e2=b2e2=c2e2=d2e2为已知,记为x;
48.训练仪的在墙面形成的视点需要上视点、下视点、左视点和右视点到中心视点的距离相同,即a1e1=b1e1=c1e1=d1e1,但是其距离数值是可变化的,记为y;
49.另外,中心视点对应的激光测距仪e2到中心视点e1的距离可知记为e1e2;
50.具体使用时需要先确定y的数值,假设设定左视点c1位置,则需要a2、b2、d2上的第
二步进电机转动去确定a1、b1、d1的位置,由于使用步进电动其旋转角度可控,则∠e2c2c1度数可知;
51.如图6所示,已知量有c1e1=d1e1=y,c2e2=d2e2=x,∠c2e2e1=∠d2e2e1=90
°
,∠e2c2c1,距离c2c1、e2e1,未知量有距离d2d1和∠e2d2d1;
52.运用三角形余弦定理进行计算,具体如下:
53.e2c12=c2c12+x2‑
2xc2c1cos∠e2c2c1即可获得e2c1的之间的距离;
54.e2c12=e2e12+y2‑
2ye2e1cos∠c1e1e2即可获得∠c1e1e2的度数;
55.∠d1e1e2=180
°‑
∠c1e1e2;
56.运用余弦定理,求得e2d1的长度,再计算出∠e1e2d1的度数,则∠d2e2d1=90
°‑
∠e1e2d1,运用余弦定理求得d2d1的长度,运用余弦定理计算出∠e2d2d1的度数。
57.如图5所示,已知量有a1e1=b1e1=y,a2e2=b2e2=x,∠a2e2e1=∠b2e2e1=∠a1e1e2=∠b1e1e2=90
°
,距离e2e1,未知量有距离a2a1=b2b1、∠e2a2a1=∠e2b2b1;
58.同上运用余弦定理可计算出∠e2a2a1和∠e2b2b1。
59.综上可知,当通过视点a1、b1、c1、d1中的一个视点确定位置,即设定y的长度,即可通过计算其他视点的位置,方便本发明的各个视点未知的自动确定。
60.本发明在康复训练中可分为以下模式
61.1、摇头固视
62.只利用中心视点e1,训练者首先让双眼正视中心视点e1,再保证视线不动,头部左右和上下摆动,摆动幅度可根据需要控制,训练不超过5分钟。
63.2、交替固视
64.确定上视点a1、下视点b1、左视点c1、右视点d1的位置,保留上视点a1、下视点b1、左视点c1、右视点d1常亮,中心视点e1熄灭;
65.左右摆头,训练者的视线跟随头部移动,在左视点c1、右视点d1转换,上下摆头,训练者的视线跟随头部移动,在上视点a1、下视点b1之间转换,摆动幅度可根据需要控制,训练不超过5分钟。
66.3、分离固视
67.确定上视点a1、下视点b1、左视点c1、右视点d1的位置,保留上视点a1、下视点b1、左视点c1、右视点d1常亮,中心视点e1熄灭;
68.训练者正面面对原中心视点e1,头部不动,双眼在上视点a1、下视点b1间上下移动,在左视点c1、右视点d1间左右移动,摆动幅度可根据需要控制,训练不超过5分钟。
69.4、反向固视
70.确定上视点a1、下视点b1、左视点c1、右视点d1和中心视点e1的位置,利用中心视点e1对应的第二步进电机转动记录中心视点e1到左视点c1和右视点d1的路径过程中,中心视点e1对应的第二步进电机转动角度的变化,利用第一步进电机转动记录中心视点e1到左视点a1和右视点b1的路径过程中,第一步进电机转动角度的变化,并记录到控制系统中;
71.训练时,上视点a1、下视点b1、左视点c1、右视点d1熄灭消失,只保留中心视点e1,初始训练者主视中心视点e1,中心视点e1对应的第二步进电机根据存储记录的摆动角度向左转动,则中心视点e1向左视点c1移动,此时训练者的主视实现跟随向左视点c1移动,而头部则向相反方向转动,同理进行向右的训练,同理利用第一步进电机记录的转动角度进行
向上和向下的训练,摆动幅度可根据需要控制,训练不超过5分钟。
72.本发明在进行上述四中训练过程中,可利用语音模块播放训练语音,根据训练语音提示记性相关训练,训练效果更好,同时可以根据语音提示进行训练幅度的控制,特别的对于反向固视训练模式,训练者的实现移动及头部转动速度,可根据步进电机转动速度进行幅度变化。
73.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1