重力自锁式电线杆载重攀爬机器人的制作方法
1.本发明涉及电力维护设施,具体涉及一种重力自锁式电线杆载重攀爬机器人。
背景技术:
2.目前,针对电线杆攀爬机器人的研发,我国的进度明显滞后于西方国家。相对较为先进的研究成果是带电作业机械臂,带电作业机械臂的研发对电力检修工作的帮助虽然很大,但是它也存在一些缺点。一是带电作业机械臂对于工作环境的要求很高,且较为笨重,而斗臂车大都不能为其提供稳定的工作环境,无法使其精确的进行工作。二是带电作业机械臂需要操作员配合工作,操作员的安全也无法得到保障。目前虽然国内也有人在研究智能化、自动化的爬杆机器人,目的是使其能够携带人员和设备沿电线杆上下攀爬,以取代斗臂车的托举结构,但是其结构稳定性和使用安全性都不够好,结构也比较复杂,无法保证带电作业机械臂能够可靠地工作,也无法保证工人的安全,无法满足电力系统的使用需要。
技术实现要素:
3.本发明的目的是针对现有爬杆机器人的不足,提供一种结构简单,稳定性好,运行平稳,使用安全性好的重力自锁式电线杆载重升降攀爬机。
4.本发明的技术解决方案是:它包括攀爬机构和载重平台,攀爬机构包括有方框一、方框二、左前连杆、右前连杆、左后连杆和右后连杆,方框一和方框二相交叉,方框一和方框二的前框梁中上部、方框一和方框二的后框梁中上部分别通过铰轴相铰接,方框一的左前部与左前连杆的上端相铰接、左后部与左后连杆的上端相铰接,方框二的右前部与右前连杆的上端相铰接、右后部与右后连杆的上端相铰接,方框一和方框二相互铰接点的左右两侧分别设有前端转动安装在前框梁上、后端转动安装在后框梁上的攀爬轮,方框一的右侧安装有输出轴与方框一右侧的攀爬轮轴相连的攀爬减速电机,方框二的左侧安装有输出轴与方框一左侧的攀爬轮轴相连的攀爬减速电机,方框一和方框二的前侧之间设有两端分别与方框一左前部和方框二右前部相铰接的电动拉杆一,方框一和方框二的后侧之间设有两端分别与方框一左后部和方框二右后部相铰接的电动拉杆二,左前连杆、右前连杆、左后连杆和右后连杆的下端分别与载重平台相铰接,载重平台随着攀爬机构在电线杆上一起升降。
5.本发明的技术效果是:它结构简单,稳定性好,运行平稳,使用安全性好。它可以平稳地沿着电线杆上下攀爬,载重平台升降稳定可靠,使工人和设备的安全性更有保证。它设计合理,容易操作,既节省动力,攀爬起来又稳定可靠,减小工人的劳动强度的同时,可以提高工人巡检电线的安全性。
6.它采用了非常简单的攀爬机构,两方框相交叉,载重平台挂在攀爬机构的下方,在载重平台重力作用下,两对攀爬轮相配合夹紧电线杆,攀爬机构挂着载重平台,沿电线杆上下攀爬。它还采用了简单的安全装置,以防止意外坠落,安全性有保证。它对电线杆的规格要求不高,使用它巡检费用低,便于携带,有利于保证巡检电线工人的正常工作,使电力线
始终处于正常工作状态。
附图说明
7.图1为本发明实施例立体结构图一;图2为本发明实施例立体结构图二;图3为本发明实施例安全装置结构示意图;图4为本发明实施例攀爬轮立体结构示意图一;图5为本发明实施例攀爬轮立体结构示意图二;图6为本发明实施例攀爬轮立体结构示意图三。
具体实施方式
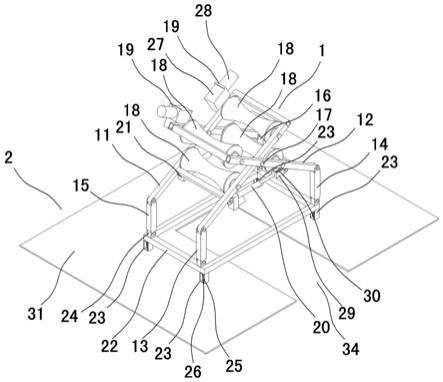
8.如图1、图2所示,它包括攀爬机构1和载重平台2,攀爬机构1包括有方框一11、方框二12、左前连杆13、右前连杆14、左后连杆15和右后连杆16,方框一11和方框二12相交叉,方框一11和方框二12的前框梁中上部、方框一11和方框二12的后框梁中上部分别通过铰轴17相铰接,方框一11的左前部与左前连杆13的上端相铰接、左后部与左后连杆15的上端相铰接,方框二12的右前部与右前连杆14的上端相铰接、右后部与右后连杆16的上端相铰接,方框一11和方框二12相互铰接点的左右两侧分别设有前端转动安装在前框梁上、后端转动安装在后框梁上的攀爬轮18,方框一11的右侧安装有输出轴与方框一11右侧的攀爬轮18轴相连的攀爬减速电机19,方框二12的左侧安装有输出轴与方框一11左侧的攀爬轮18轴相连的攀爬减速电机19,方框一11和方框二12的前侧之间设有两端分别与方框一11左前部和方框二12右前部相铰接的电动拉杆一20,方框一11和方框二12的后侧之间设有两端分别与方框一11左后部和方框二12右后部相铰接的电动拉杆二21,左前连杆13、右前连杆14、左后连杆15和右后连杆16的下端分别与载重平台2相铰接,载重平台2随着攀爬机构1在电线杆上一起升降。
9.方框一11和方框二12分别由相互连接的前框梁、后框梁、左框梁和右框梁构成,方框一11前框梁的左端与左前连杆13的上端相铰接,方框一11后框梁的左端与左后连杆15的上端相铰接,方框二12前框梁的右端与右前连杆14的上端相铰接,方框二12后框梁的右端与右后连杆16的上端相铰接。
10.左前连杆13、右前连杆14、左后连杆15和右后连杆16的下端与载重平台2之间设有连接框22和缓冲座23,左前连杆13、右前连杆14、左后连杆15和右后连杆16的下端分别与设于连接框22的左前部、右前部、左后部和右后部位置的连接座24相铰接,连接框22的左前部、右前部、左后部和右后部与载重平台2之间分别通过缓冲座23相连,各缓冲座23的上端分别固定在连接框22上,各缓冲座23与载重平台2底板之间分别设有连接螺栓25和压簧一26,各连接螺栓25的螺纹端从下向上穿过载重平台2底板上的螺栓孔、缓冲座23上的螺栓孔和压簧一26中心孔,上端部分别通过螺纹安装有螺母和平垫,压簧一26的两端分别与缓冲座23和平垫相配合。
11.攀爬减速电机19由齿轮减速器27和伺服电机28构成,伺服电机28的输出轴与齿轮减速器27的输入轴相连,齿轮减速器27的输出轴与相配合的攀爬轮18一端的攀爬轮轴相连,带动攀爬轮18转动。
12.电动拉杆一20和电动拉杆二21本体的尾端分别与设于方框一11上的铰接座相铰接,电动拉杆一20和电动拉杆二21的拉杆与方框二12之间分别设有缓冲器29,缓冲器29与方框二12相连端与设于方框二12上的铰接座相铰接,电动拉杆一20和电动拉杆二21拉杆的头部穿过缓冲器29上的拉杆孔后套装有压簧二30, 拉杆的端部通过螺纹安装有螺母,压簧二30的两端分别与缓冲器29和螺母相配合。
13.载重平台2由底板31、外围栏32和内围栏33构成,底板31上设有从底板31的中部沿伸到底板31的一侧的电线杆槽34,外围栏32从电线杆槽34槽口的一侧沿伸到另一侧,安装在底板31的外周,内围栏33安装在攀爬机构1的外周和电线杆槽34的边部位置,并在电线杆槽34槽口的位置与外围栏32相连。
14.它还包括电源和控制器,电源与控制器相连为控制器提供电源,控制器与攀爬减速电机19、电动拉杆一20和电动拉杆二21相连为其提供电源和控制信号。
15.如图3所示,方框一11和方框二12前后相互铰接的位置分别设有安全装置,安全装置由棘轮35、棘爪36和棘爪弹簧37构成,棘轮35与方框一11和方框二12之间的铰轴17同心固定安装在方框二12的前框梁和后框梁上,棘爪36与棘轮35相配合铰接在方框一11的前框梁和后框梁上,棘爪弹簧37安装在棘爪36与方框一11的前框梁和后框梁之间;或者棘轮35与方框一11和方框二12之间的铰轴17同心安装在方框一11的前框梁和后框梁上,棘爪36与棘轮35相配合铰接在方框二12的前框梁和后框梁上,棘爪弹簧37安装在棘爪36与方框二12的前框梁和后框梁之间,棘爪36上连接有控制安全装置离合的拉杆或拉筋38,拉杆或拉筋38的另一端与安装在载重平台2上的控制手柄相连。
16.如图4、图5、图6所示,各攀爬轮18分别为外径从中部向两端逐渐变粗的弧形槽轮或v字形槽轮,各攀爬轮18或分别为外径的中部具有一段等径段,等径段的两端向攀爬轮18的两端逐渐变粗的梯形槽轮。
17.各攀爬轮18分别由金属轮体39和套装在轮体39外的防滑弹性材料制成的轮箍40构成。
18.工作原理:本机器人使用前需要安装在电线杆上,首先将攀爬机构1的框架打开,使方框一11和方框二12上的两个攀爬轮18的分别位于电线杆的不同侧压在电线杆的外壁上,再将攀爬机构1的框架连接起来,就可以准备好在电线杆上向上爬升。载重平台2的重量压在左前连杆13、右前连杆14、左后连杆15和右后连杆16的下端,带动方框一11的左下侧和方框二12的右下侧、方框一11的右上侧和方框二12的左上侧一直向一起收拢,从而使方框一11和方框二12上的两对攀爬轮18相配合始终抱紧电线杆。
19.机器人爬升时,攀爬减速电机19带动方框一11和方框二12上方的两个主动攀爬轮18对向向下转动,下方的两个从动攀爬轮18也会对向向下转动,在电线杆的表面产生磨擦力,使攀爬机构1带动载重平台2向上爬升。同时,在控制装置的控制作用下,电动拉杆一20和电动拉杆二21会随着攀爬轮18的转动逐渐收紧,使两对攀爬轮18对电线杆的外壁具有足够大的压力和夹紧力,以保证攀爬机构1带动载重平台2在电线杆上安全地向上爬升。在整个装置向上爬升的同时,方框一11和方框二12之间的安全装置也会同步动作,随着棘轮35相对于棘爪36的逐渐转动,在棘爪弹簧37的作用下,棘爪36会逐渐与棘轮35上不同位置的棘齿36相啮合,使方框一11和方框二12上左右相配合的攀爬轮18只能收拢不会外张,适应
电线杆越往上越细的同时,也可以防止攀爬机构1和载重平台2意外下坠,起到安全保障作用。
20.机器人上升到合适的高度后,其上搭载的人员和设备就可以对电力系统进行维护和检修。
21.机器人下降时,首先利用控制手柄使安全装置打开,就可以控制攀爬减速电机19反向转动,同时控制电动拉杆一20和电动拉杆二21逐渐放松,使攀爬机构1带动载重平台2沿着电线杆向下爬,直到安全降到地面。从该电线杆上取下机器人后,可以再用于其它电线相上继续攀爬。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1