多方向输入装置的制作方法
1.本发明涉及多方向输入装置。
背景技术:
2.在下述专利文献1中公开了能够进行基于操作体的按下操作以及滑动操作的多方向输入装置。
3.专利文献1:日本特开2007-227337号公报
技术实现要素:
4.但是,专利文献1所公开的技术在通过滑动操作使操作体沿着水平方向移动的状态下,无法进行操作体的按下操作。
5.一个实施方式的多方向输入装置具备:壳体,具有上部开口;操作体,插通上部开口而设置,能够进行按下操作以及滑动操作;保持部件,在壳体的内部,将操作体保持为能够沿着上下方向移动,并能够与操作体一起水平移动;按下检测部,在壳体的内部设置在与操作体的底部对置的位置,通过按下操作而被按下;以及板状的施力部件,在壳体的内部,设置在操作体的底部与按下检测部之间,施力部件具有:平面部,设置于该施力部件的中央,当进行了按下操作时,按下按下检测部,并且对操作体付与回复力;以及多个弹性臂部,从平面部沿着平面部的外周延伸设置,前端部由壳体的内壁支承。
6.发明效果
7.根据一个实施方式的多方向输入装置,能够在进行了操作体的滑动操作的状态下进行该操作体的按下操作,且能够减少因滑动位置而引起的与操作体的按下操作相关的操作载荷的偏差。
附图说明
8.图1是一个实施方式的多方向输入装置的外观立体图。
9.图2是一个实施方式的多方向输入装置的分解立体图。
10.图3是一个实施方式的多方向输入装置的剖视图。
11.图4是表示一个实施方式的施力部件的上表面侧的外观立体图。
12.图5是表示一个实施方式的施力部件的下表面侧的外观立体图。
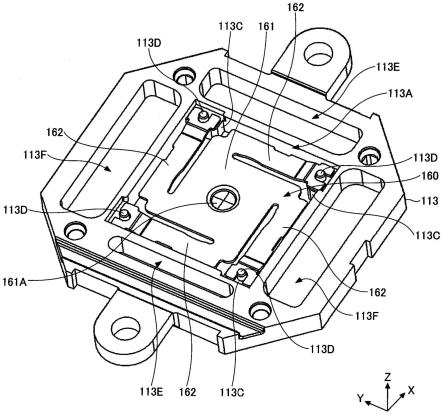
13.图6是一个实施方式的施力部件以及下壳体部的外观立体图。
14.符号说明:
15.100:多方向输入装置;110:壳体;110a:上部开口;110b:间隙;111:上壳体部;111a:开口;111b:定位销;111c:爪部;112:中间壳体部;112a:开口;112b:定位孔;112c:定位销;112d:爪部;113:下壳体部;113a:开口;113b:定位孔;113c:台座部;113d:定位销;113e:滑动槽;113f:滑动槽;113g:分隔壁部;120:杆;121:杆部;122:基部;130:保持部件;131:保持部;132:凸缘部;133:贯通孔;133a:小径部;133b:大径部;140:环状螺旋弹簧;
151:第1滑块;151a:开口部;152:第1滑动件;153:第2滑块;153a:开口部;154:第2滑动件;155:第3滑块;155a:腿部;155b:开口部;160:施力部件;161:平面部;161a:突起部;162:弹性臂部;162a:卡合部;162b:切口;162c:台阶部;170:fpc;170a:主要部;170b:伸出部;170c:连接部;172:金属触点;174:第1电阻体;176:第2电阻体;180:框架;181卡止片。
具体实施方式
16.下面,参考附图对一个实施方式进行说明。
17.(多方向输入装置100的概要)
18.图1是一个实施方式的多方向输入装置100的外观立体图。另外,在以下的说明中,为了方便,将图中z轴方向设为上下方向,将图中x轴方向以及y轴方向设为水平方向。
19.图1所示的多方向输入装置100用于游戏机的控制器等。如图1所示,多方向输入装置100具备插通壳体110的上部开口110a而设置的柱状的杆120(“操作体”的一例)。多方向输入装置100能够进行杆120向水平方向(x轴方向以及y轴方向)的滑动操作、以及杆120向下方(z轴负方向)的按下操作。尤其地,多方向输入装置100构成为,在进行了杆120的滑动操作的状态下,能够进行杆120的按下操作,且能够减少因杆120的滑动方向以及滑动量(滑动位置)而引起的与杆120的按下操作相关的操作载荷的偏差。
20.(多方向输入装置100的构成)
21.图2是一个实施方式的多方向输入装置100的分解立体图。图3是一个实施方式的多方向输入装置100的剖视图。
22.如图2以及图3所示,多方向输入装置100具备壳体110、杆120、保持部件130、环状螺旋弹簧140、第1滑块151、第1滑动件152、第2滑块153、第2滑动件154、第3滑块155、施力部件160、fpc(flexible printed circuits)170以及框架180。
23.壳体110是在内部组装有各构成构件的容器状的部件。壳体110使用树脂原料形成。在壳体110的上壁部的中央形成有俯视呈圆形状的上部开口110a。在上部开口110a中插通杆120。在本实施方式中,壳体110俯视具有八边形状。但是,并不限定于此,壳体110也可以俯视具有其他的形状(例如,圆形状、四边形状等)。
24.壳体110具有上壳体部111、中间壳体部112以及下壳体部113,具有将这三个壳体部组合而成的层叠构造。上壳体部111、中间壳体部112以及下壳体部113均是俯视具有八边形状的薄板状的部件。
25.上壳体部111重叠设置在中间壳体部112的上侧。上壳体部111具有朝下方突出设置的多个定位销111b。通过将多个定位销111b分别嵌入中间壳体部112的多个定位孔112b,上壳体部111相对于中间壳体部112准确地定位。在上壳体部111的中央形成有俯视呈圆形状的开口111a。开口111a与中间壳体部112的开口112a重合,由此与开口112a一起形成壳体110的上部开口110a。
26.中间壳体部112重叠设置在下壳体部113的上侧。中间壳体部112具有朝下方突出设置的多个定位销112c。通过多个定位销112c分别嵌入下壳体部113的多个定位孔113b,中间壳体部112相对于下壳体部113准确地定位。在中间壳体部112的中央形成有俯视呈圆形状的开口112a。开口112a与上壳体部111的开口111a重合,由此与开口111a一起形成壳体110的上部开口110a。
27.下壳体部113重叠设置在中间壳体部112的下侧。下壳体部113在四角分别形成有用于将中间壳体部112准确地定位的定位孔113b。在下壳体部113的中央形成有俯视呈正方形状的开口113a。在开口113a配置有俯视呈大致正方形状的施力部件160。在下壳体部113,在其间夹着开口113a而在x轴方向上设置有一对滑动槽113e。一对滑动槽113e沿着y轴方向呈直线状延伸,为了能够沿着y轴方向滑动地收纳朝第1滑块151的下方突出的两端部而形成。此外,在下壳体部113,在其间夹着开口113a而在y轴方向上设置有一对滑动槽113f。一对滑动槽113f沿着x轴方向呈直线状延伸,为了能够沿着x轴方向滑动地收纳朝第2滑块153的下方突出的两端部而形成。另外,在下壳体部113中,滑动槽113e与开口113a之间的壁部成为将fpc170的设置金属触点172的区域与fpc170的设置第1电阻体174的区域相互隔离的分隔壁部113g。此外,在下壳体部113中,滑动槽113f与开口113a之间的壁部成为将fpc170的设置金属触点172的区域与fpc170的设置第2电阻体176的区域相互隔离的分隔壁部113g。
28.杆120是由操作者进行按下操作以及滑动操作的部件。杆120具有杆部121以及基部122。杆部121是从壳体110的上部开口110a朝向上方延伸的大致圆柱状的部分、且是由操作者进行按下操作以及滑动操作的部分。基部122是在壳体110的内部支承杆部121的下端部的、直径比杆部121大的圆柱状的部分。杆部121的直径比保持部件130的贯通孔133的小径部133a小,贯通贯通孔133。因此,如图3所示,杆部121在插通小径部133a的状态下,其下端部由小径部133a支承。基部122的直径比保持部件130的贯通孔133的小径部133a大,且比保持部件130的贯通孔133的大径部133b小。因此,如图3所示,基部122不贯通小径部133a而嵌入大径部133b,由大径部133b支承。杆120的基部122与大径部133b的顶面抵接,由此,杆120相对于保持部件130朝上方的移动被限制在规定的上限位置(参照图3)。另外,贯通孔133的小径部133a的截面形状和插通于小径部133a的杆部121的截面形状均不是完全的圆形状,而是具有进行了所谓的侧切的圆形状。由此,杆部121不会在贯通孔133的小径部133a的内部旋转。即,杆部121不相对于保持部件130相对地旋转。
29.保持部件130在壳体110的内部,将杆120保持为能够沿着上下方向移动,并能够与杆120一起进行水平移动。如图2以及图3所示,保持部件130具有保持部131以及凸缘部132。保持部131是设置于保持部件130的中央部的大致圆柱状的部分。在保持部131的中央形成有沿着上下方向贯通该保持部131的贯通孔133。保持部131通过在贯通孔133的内部插通杆120而将杆120的下部保持为能够沿着上下方向移动。凸缘部132形成为从保持部131的外周侧面朝向径向外侧扩展,是俯视具有圆环状的圆盘状的部分。如图3所示,凸缘部132进入形成在上壳体部111的开口111a的内壁与中间壳体部112的开口112a的内壁之间的间隙110b内。由此,凸缘部132被配置于间隙110b的外侧的环状螺旋弹簧140朝向径向内侧施力。另外,保持部件130通过凸缘部132进入间隙110b,能够朝水平方向移动,并且朝上下方向的移动被限制。因此,保持部件130在进行了杆120的滑动操作的情况下,能够与杆120一起沿着水平方向滑动,在进行了杆120的按下操作的情况下,自身不会朝下方移动,能够使杆120朝下方移动。
30.环状螺旋弹簧140是具有圆环状的弹性部件。如图3所示,环状螺旋弹簧140设置成,在形成在上壳体部111的开口111a的内壁与中间壳体部112的开口112a的内壁之间的间隙110b的外侧包围该间隙110b。由此,环状螺旋弹簧140配置成,包围从间隙110b的内侧进
入该间隙110b内的保持部件130的凸缘部132的外周缘部。并且,环状螺旋弹簧140将保持部件130的凸缘部132朝径向的内侧施力。环状螺旋弹簧140当杆120被滑动操作时,通过从保持部件130的凸缘部132朝向径向外侧施加力而弹性变形,并且对保持部件130的凸缘部132朝向径向内侧付与回复力。由此,环状螺旋弹簧140使保持部件130回复到初始位置。此外,环状螺旋弹簧140当保持部件130位于初始位置时,对凸缘部132的外周缘部的整周均等地加压,由此维持保持部件130位于初始位置的状态。
31.第1滑块151是俯视具有将x轴方向作为长边方向的长方形状的薄板状的部件。第1滑块151在壳体110内以与第2滑块153正交的方式重叠在第2滑块153的上侧,设置成能够沿着y轴方向滑动。在第1滑块151的x轴正侧的端部的底部设置有金属制的第1滑动件152。在第1滑块151的中央部形成有开口部151a。开口部151a俯视具有将x轴方向作为长边方向的长方形状(长孔形状)。在开口部151a插通设置保持部件130的保持部131。由此,第1滑块151随着保持部件130的滑动移动,与保持部件130一起沿着y轴方向滑动。由此,保持于第1滑块151的下部的第1滑动件152与设置于fpc170的第1电阻体174的电连接状态变化,从fpc170的连接部170c输出基于与杆120向y轴方向的滑动操作(滑动方向以及滑动量)相应的电阻值的操作信号。
32.第2滑块153是俯视具有将y轴方向作为长边方向的长方形状的薄板状的部件。第2滑块153在壳体110内重叠在下壳体部113的上侧,设置成能够沿着x轴方向滑动。在第2滑块153的y轴正侧的端部的底部设置有金属制的第2滑动件154。在第2滑块153的中央部形成有开口部153a。开口部153a俯视具有将y轴方向作为长边方向的长方形状(长孔形状)。在开口部153a插通设置保持部件130的保持部131。由此,第2滑块153随着保持部件130向x轴方向的滑动移动,与保持部件130一起沿着x轴方向滑动。由此,保持于第2滑块153的下部的第2滑动件154与设置于fpc170的第2电阻体176的电连接状态变化,从fpc170的连接部170c输出基于与杆120向x轴方向的滑动操作(滑动方向以及滑动量)相应的电阻值的操作信号。
33.第3滑块155是俯视具有将y轴方向作为长边方向的长方形状的薄板状的部件。第3滑块155在壳体110内以与第1滑块151正交的方式重叠在第1滑块151的上侧,设置成能够与第2滑块153一起沿着x轴方向滑动。第3滑块155在y轴方向上的两端部分别具有朝下方突出的腿部155a。腿部155a与第2滑块153的上表面抵接,在第2滑块153与第3滑块155之间形成第1滑块151能够滑动的空间。在第3滑块155的中央部形成有开口部155b。开口部155b俯视具有将y轴方向作为长边方向的长方形状(长孔形状)。在开口部155b中插通保持部件130的保持部131。由此,第3滑块155随着保持部件130向x轴方向的滑动移动,与保持部件130以及第2滑块153一起沿着x轴方向滑动。
34.施力部件160由金属板形成,是俯视呈大致正方形状的薄板状的部件。施力部件160配置在下壳体部113的开口113a内(即,在壳体110的内部,在杆120的底部与金属触点172之间)。施力部件160当杆120被进行了按下操作时,按下金属触点172,并且对杆120付与回复力。另外,关于施力部件160的详细构成,使用图4~图6在后面叙述。
35.fpc170是具有挠性的薄膜状的布线部件。fpc170具有主要部170a、伸出部170b以及连接部170c。主要部170a是设置于下壳体部113的下侧的俯视具有八边形状的部分。在主要部170a的中央设置有两个固定触点(省略图示),在这两个固定触点的上侧重叠设置圆顶状的金属触点172。这两个固定触点和金属触点172构成作为“按下检测部”的一例的按动开
关。另外,“按下检测部”的构成并不限定于能够进行接通断开的切换的按动开关,也可以是输出值根据按下量逐渐变化的模拟检测部。此外,在主要部170a设置有第1电阻体174以及第2电阻体176。第1电阻体174是“滑动检测部”的一例,沿着y轴方向呈直线状延伸设置,通过保持于第1滑块151的下部的第1滑动件152沿着y轴方向滑动,电阻值变化,由此检测杆120沿y轴方向的滑动操作。第2电阻体176是“滑动检测部”的一例,沿着x轴方向呈直线状延伸设置,通过保持于第2滑块153的下部的第2滑动件154沿着x轴方向滑动,电阻值变化,由此检测杆120沿x轴方向的滑动操作。伸出部170b是从主要部170a朝壳体110的侧方(图中y轴负方向)延伸的部分。连接部170c设置于伸出部170b的前端,与外部的连接器等连接。fpc170将与杆120的操作(按下操作以及滑动操作)相应的操作信号朝向外部传送。fpc170通过利用具有挠性以及绝缘性的薄膜状的原料(例如,聚酰亚胺树脂、聚对苯二甲酸乙二醇酯(pet:polyethylene terephthalate)等)覆盖带状的导体布线(例如,铜箔等)的两表面而构成。
36.框架180是封闭壳体110的底面侧的开口部的金属制且平板状的部件。例如,框架180通过对金属板进行各种加工方法(例如,冲孔加工、折弯加工等)而形成。框架180在x轴正侧的边缘部以及x轴负侧的边缘部分别具有垂直地立起设置的一对卡止片181。框架180通过各卡止片181与设置于上壳体部111的侧面的爪部111c(参照图2)以及设置于中间壳体部112的侧面的爪部112d(参照图2)卡合,在与壳体110的下表面之间夹入fpc170的状态下相对于壳体110的下表面固定。由此,框架180将上壳体部111、中间壳体部112以及下壳体部113固定为相互结合的状态(参照图1)。
37.(施力部件160的详细构成)
38.接着,参照图4~图6对施力部件160的详细构成进行说明。图4是表示一个实施方式的施力部件160的上表面侧的外观立体图。图5是表示一个实施方式的施力部件160的下表面侧的外观立体图。图6是一个实施方式的施力部件160以及下壳体部113的外观立体图。
39.如图4~图6所示,施力部件160具有平面部161以及四个弹性臂部162。
40.平面部161是设置于施力部件160的中央的俯视具有正方形状的部分。在平面部161的中央形成有朝下方突出的突起部161a。突起部161a俯视具有圆形状。突起部161a通过冲压加工而形成。另外,平面部161的尺寸为覆盖杆120的滑动操作范围的整个区域的尺寸。由此,无论杆120位于哪个滑动位置,平面部161都能够被杆120压下。
41.四个弹性臂部162是从平面部161相对于平面部161的4个边分别平行地(即,沿着平面部161的外周)延伸设置的臂状(俯视具有一定宽度的直线带状)的部分。各弹性臂部162的末端部与平面部161的外周连结,在其前端部设置有卡合部162a。四个弹性臂部162设置成相对于平面部161的中心点对称。即,四个弹性臂部162分别相对于平面部161的对应的边朝同一方向延伸设置。
42.如图6所示,施力部件160俯视具有与下壳体部113的开口113a大致相同尺寸的大致正方形状,配置在下壳体部113的开口113a(“壳体的开口部”的一例)内。此时,如图6所示,四个弹性臂部162各自的卡合部162a载置在朝内侧突出地分别设置在开口113a的4个角的台座部113c的上表面,进而,卡合部162a的切口162b与从台座部113c的上表面突出设置的定位销113d卡合。由此,施力部件160由下壳体部113在4个点支承。
43.如图3所示,杆120的下端部与平面部161的中央的上表面抵接。此外,在平面部161
的中央的下侧配置金属触点172。由此,施力部件160当进行了杆120的按下操作时,多个弹性臂部162弹性变形,并且平面部161维持大致水平状态朝下方移动,通过平面部161的突起部161a的下表面按下构成按动开关的金属触点172。由此,金属触点172呈凹状弹性变形,设置于fpc170的两个固定触点经由金属触点172电连接,从fpc170的连接部170c输出与按下操作相应的操作信号(开关接通信号)。然后,施力部件160通过多个弹性臂部162的弹性力,在平面部161的上表面对杆120付与向上方的回复力。由此,施力部件160当杆120的按下操作被解除时,能够使杆120回复到初始位置(图3所示的上限位置)。
44.另外,在未进行杆120的按下操作的初始状态下,杆120被施力部件160的平面部161朝上方施力,杆120的基部122抵靠于保持部件130的贯通孔133的大径部133b的顶面。由此,一个实施方式的多方向输入装置100在未进行杆120的按下操作的初始状态下,能够抑制杆120的上下方向的晃动。
45.此处,一个实施方式的多方向输入装置100采用通过保持部件130将杆120保持为能够沿着上下方向移动且经由施力部件160的平面部161按压金属触点172的构成,因此,在进行了杆120的滑动操作的状态(即,杆120以及保持部件130从初始位置沿着水平方向滑动移动的情况)下,即使在进行了杆120的按下操作的情况下,杆120也相对于保持部件130相对朝下方移动,能够通过该杆120的底部经由施力部件160的平面部161按下金属触点172。
46.尤其地,一个实施方式的多方向输入装置100采用施力部件160通过四个弹性臂部162在4个点弹性支承平面部161的构成,因此,能够使四个弹性臂部162弹性变形,并使平面部161维持大致水平状态朝下方移动,因此,能够不管杆120的滑动位置如何,都以大致同等的操作载荷按下金属触点172。
47.进而,在一个实施方式的多方向输入装置100中,施力部件160能够使从杆120受到的操作载荷集中在形成于平面部161的中央的突起部161a,因此,能够不管杆120的滑动位置如何都以大致同等的操作载荷通过突起部161a更可靠地按下金属触点172。
48.此外,如图4~图6所示,多个弹性臂部162分别具有用于使卡合部162a的高度位置不同的台阶部162c。在本实施方式中,作为一例,多个弹性臂部162分别通过台阶部162c提高卡合部162a的高度位置。由此,一个实施方式的多方向输入装置100与弹性臂部162不具有台阶部的构成相比,能够增长弹性臂部162的长度(即,弹簧长度)。
49.此外,一个实施方式的多方向输入装置100通过将多个弹性臂部162各自的前端部(卡合部162a)载置于从形成下壳体部113的开口113a的内壁朝内侧突出设置的台座部113c,由该台座部113c吊持。由此,一个实施方式的多方向输入装置100仅通过使施力部件160从上方落入开口113a内,就能够成为施力部件160被台座部113c支承的状态。因此,一个实施方式的多方向输入装置100能够提高施力部件160相对于下壳体部113的组装性。
50.此外,在一个实施方式的多方向输入装置100中,多个弹性臂部162相对于平面部161的中心点对称地配置。由此,一个实施方式的多方向输入装置100能够不管杆120的滑动方向如何都以大致同等的操作载荷按下金属触点172。
51.此外,在一个实施方式的多方向输入装置100中,各弹性臂部162具有与平面部161的外周的对应的边的长度大致相等的长度。即,在一个实施方式的多方向输入装置100中,各弹性臂部162从平面部161中的一个角部的附近沿着将这两个角部相连的边延伸至平面部161中的另一角部的附近。由此,在一个实施方式的多方向输入装置100中,不会使施力部
件160的外形大型化,能够最大限度增长弹性臂部162的长度(即,弹簧长度)。
52.此外,在一个实施方式的多方向输入装置100中,施力部件160的平面部161具有比杆120的底部的能够滑动移动的范围大的面积。由此,在一个实施方式的多方向输入装置100中,即使在使杆120最大限度滑动的情况下,也能够经由平面部161按下金属触点172。
53.此外,在一个实施方式的多方向输入装置100中,施力部件160的平面部161与多个弹性臂部162一体地形成。由此,在一个实施方式的多方向输入装置100中,能够通过冲压加工一并形成平面部161与多个弹性臂部162,且能够抑制构件个数的增加。
54.此外,一个实施方式的多方向输入装置100还具备根据电阻值的变化来检测杆120的滑动操作的第1电阻体174以及第2电阻体176。由此,一个实施方式的多方向输入装置100能够以比较简单的构成高精度地检测杆120的滑动操作方向以及滑动操作量。
55.此外,在一个实施方式的多方向输入装置100中,壳体110(下壳体部113)具有将fpc170的设置金属触点172的区域与fpc170的设置第1电阻体174以及第2电阻体176的区域相互隔离的分隔壁部113g。由此,一个实施方式的多方向输入装置100例如能够抑制因第1电阻体174以及第2电阻体176的滑动而产生的金属粉进入fpc170的设置金属触点172的区域内。
56.此外,一个实施方式的多方向输入装置100还具备水平施力部件,在进行基于杆120的滑动操作时,该水平施力部件将保持部件130朝向水平方向的初始位置施力。由此,一个实施方式的多方向输入装置100在基于杆120的滑动操作被解除时,能够使杆120回复到初始位置。
57.此外,在一个实施方式的多方向输入装置100中,水平施力部件是环状螺旋弹簧140。由此,在一个实施方式的多方向输入装置100中,能够以较少的构件个数对基于杆120的所有方向的滑动操作付与朝向初始位置的回复力。此外,在一个实施方式的多方向输入装置100中,通过使用了环状螺旋弹簧140,能够抑制用于使杆120回复到初始位置的构成的大型化。
58.此外,在一个实施方式的多方向输入装置100中,保持部件130具有通过插通杆120而将杆120保持为能够沿着上下方向移动的保持部131、以及从保持部131的外周面朝水平方向的外侧扩大设置的凸缘部132,环状螺旋弹簧140包围保持部件130的凸缘部132而配置,当进行了杆120的滑动操作时,将保持部件130的凸缘部132朝向水平方向的初始位置施力。由此,在一个实施方式的多方向输入装置100中,能够以较少的构件个数对基于杆120的所有方向的滑动操作付与朝向初始位置的回复力。此外,在一个实施方式的多方向输入装置100中,通过使用了环状螺旋弹簧140,能够抑制用于使杆120回复到初始位置的构成的大型化。此外,在一个实施方式的多方向输入装置100中,当杆120位于水平方向的初始位置时,通过从全部方向对保持部件130的凸缘部132进行加压,能够稳定地维持杆120位于水平方向的初始位置的状态。
59.此外,在一个实施方式的多方向输入装置100中,保持部件130的凸缘部132的上下方向的移动被壳体110限制,由此,限制保持部件130相对于壳体110的上下方向的移动、保持部件130相对于壳体110的倾倒。由此,在一个实施方式的多方向输入装置100中,能够在维持杆120的直立状态的状态下进行杆120的按下操作以及滑动操作。
60.此外,一个实施方式的多方向输入装置100作为按动开关而具有圆顶状的金属触
点172,该圆顶状的金属触点172为,当被施力部件160的平面部161按下时,呈凹状弹性变形,由此使fpc170的多个固定触点成为相互导通的状态。由此,在一个实施方式的多方向输入装置100中,不仅通过施力部件160的弹性变形,而且通过金属触点的弹性变形,相对于杆120的按下操作,能够呈现工作力以及回复力。
61.此外,在一个实施方式的多方向输入装置100中,金属触点172具有比施力部件160的平面部161的面积小的面积。由此,在一个实施方式的多方向输入装置100中,不管杆120的滑动位置如何都能够使从杆120施加于平面部161的按压操作的操作载荷集中到金属触点172,因此,能够经由平面部161更可靠地按下金属触点172。
62.以上,对本发明的一个实施方式进行了详细叙述,但本发明并不限定于这些实施方式,在技术方案所记载的本发明的主旨的范围内,能够进行各种变形或者变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1