一种武术训练用木桩
1.本发明属于武术训练技术领域,尤其涉及一种武术训练用木桩。
背景技术:
2.目前,中国文化博大精深其中武术是中国文化的基础,尤其是在和平年代;中国武术是中国文化的保障和导向,通过中国武术使得修习者重新认识人与自然、人与社会客观的客观规律;通过武术修习,使我们的头脑得到应变能力的训练,简便易行、能够轻松提升人的精神和身体素质、防卫健身、精进卓越和快乐通融人们在进行武术学习时,然而进行武术练习时最常用的道具为木桩。
3.目前的技术为一种武术训练用的木桩结构(cn201720875667.5),包括木桩本体,所述木桩本体的轴心位置设置有一沉孔,在所述沉孔内设置有配重块,在所述木桩本体的外部可上、下活动的设置有一滑套,所述滑套与所述配重块之间配合有连接绳,在所述木桩本体的顶部设置有一插板,所述插板具有一安装槽,在所述安装槽内设置有导向轮,所述导向轮与所述插板之间配合有转轴,所述连接绳支撑在所述导向轮上,在所述插板的顶部设置有固定所述连接绳用的螺丝,在所述滑套的底部设置有挡圈,在所述滑套的外壁位置处设置有受力圈,所述受力圈为橡胶材质;本装置可以针对不同身高的学院进行保护位置调节,满足不同身高的人员使用。虽然满足了不同身高的学院进行保护位置调节和不同身高的人员的使用需要,但是对于目前的装置不够智能,在进行击打后,不会记录相关的动作,而且在训练时不会记录相关的数据,训练后难以进行准确的直到和动作上的改进,而且在底架固定方面,稳定性不够,可能会出现意外,造成危险。
4.通过上述分析,现有技术存在的问题及缺陷为:
5.(1)装置不够智能,在进行击打后,不会记录相关的动作,而且在训练时不会记录相关的数据,训练后难以进行准确的指导和动作上的改进。
6.(2)在底架固定方面,稳定性不够,可能会出现意外,造成危险。
技术实现要素:
7.为了解决现有技术存在的问题,本发明提供了一种武术训练用木桩
8.本发明是这样实现的,一种武术训练用木桩设置有:
9.木桩;所述木桩底部固定有底座,木桩中间设有固定可调节木桩,木桩上端设有显示器;所述底座底部固定有固定底座,四棱台上端连接第二底座,所述第二底座内部镶嵌有控制器,第二底座上端通过减震装置连接第一底座;第一底座上端通过可调节木桩连接有显示器。
10.进一步,可调节木桩内部设置有升降气缸,升降气缸连接第二底座内的控制器,所述升降气缸上端固定在限位槽内,下端通过螺栓固定在第二底座的上端。
11.进一步,可调节木桩设置有第一训练臂、第二训练臂、第三训练臂、固定木桩、可调节木桩,木桩内侧设有压力传感器装置,压力传感器连接可调节木桩上方的显示器。
12.进一步,第一训练臂、第二训练臂和第三训练臂是穿过木桩一侧的训练臂穿孔,通过卡扣将穿过训练臂末端与可调节木桩固定连接,所述的第一训练臂和第二训练臂的长度相同,分别固定在可调节木桩的上端;第三训练臂的一端是固定在固定木桩中,另一端与地面平齐,每个训练臂穿孔的内部粘贴有环形压力传感器,环形压力传感器连接显示器和控制器。
13.第一训练比安装在可调节木桩的上端所述的供给训练者使用的是第一训练臂、第二训练臂和第三训练臂,所述的第一和第二训练臂是攻击训练者手部操作训练的,第三训练臂是攻击训练者腿部和脚部训练使用的,所述的训练者进行训练时击打训练臂,通过显示器可以显示每次击打时候的力度数据,最终在训练完成后可以显示此次训练的全部数据,为训练者记录训练结果。
14.进一步,所述显示器连接一旁的显示器开关,所述控制开关连接可调节木桩内的视频控制器和调控器,所述调控器连接距离传感器,距离传感器连接控制器;所述控制器内嵌在第一底座内,控制固定木桩和可调节木桩中的内部气缸起落,进而实现控制可调节木桩的起落。
15.进一步,底座外侧固定有真空发生器控制器,所述真空发生器通过导线连接真空发生器和吸盘,所述真空发生器镶嵌在底座内部,所述吸盘固定在底座底部,通过真空发生器实现使用真空发生器控制器控制真空发生器工作,进而实现控制吸盘是否吸附于地面。
16.进一步,缓震装置包括气缸体、活塞杆和活塞,所述气缸体前端固定连接在第一底座下端,所述活塞滑动连接于气缸体内壁,所述活塞杆固定连接于活塞前端,所述气缸体、活塞杆和活塞同轴设置,所述活塞杆远离活塞的一端与第二底座固定连接。
17.进一步,气缸体连接高精度控制器,所述高精度控制器镶嵌在第一底座内,所述高精度控制器连接气阀组件,所述气阀组件包括阀片、软管和单向气阀,所述支撑座固定连接于第二底座后端,所述阀片与气缸体连接,所述阀片中部设有软管,所述软管连接单向气阀。
18.进一步,所述真空发生器的另一端连接气缸的进气孔。
19.进一步,可调节木桩和训练臂外部包裹有海棉材质缓震层和防滑层。
20.进一步,所述控制器对环形压力传感器、视频控制器、调控器以及距离传感器感应的数据进行分析的方法包括:
21.步骤一,根据训练分阶段标准,先将训练数据分成1-2小时的小段,用采样频率乘以数据段时间长度以求得每段数据总数据点;
22.步骤二,将信号基线归零,幅度统一化为mv;
23.步骤三,用巴特沃斯带通滤波器对信号进行预处理,去除干扰信号;
24.步骤四,选择fir滤波器或小波包分解特征提取方法进入训练自动分阶段系统;首先用窗函数构造理想fir带通滤波器,包括由傅里叶反变换求得其对应单位脉冲响应,用有限长的窗函数将该响应截断为有限项,并将其作为滤波器的单位脉冲响应序列,最终用该序列来逼近理想fir滤波器;参数选择为,通带波纹允许误差设为0.1、幅值设为1,阻带波纹不大于允许误差0.02db;根据环形压力传感器、视频控制器、调控器以及距离传感器感应信号各特征波的频带范围构造7个fir带通滤波器,滤出k综合波、δ波、θ波、α波、梭形波及β1波和β2波各自占波段总能量的百分比;采用bio97小波基,shannon函数为代价函数,对环形压
力传感器、视频控制器、调控器以及距离传感器感应信号施行5层小波包分解,取各特征波最相近的频率段所对应小波包系数重构波形,并分离出上述各特征波;联合总能量、α波与θ波的能量比率、δ波与θ波的能量比率3个能量特征,共同构成10个能量特征值,将采用fir滤波器法和小波包分解法取得的关于训练数据的10个特征分别用ls-svm模型进行分期,与标准专家分期对比,选择平均准确率较高的特征提取方法;
25.步骤五,提取环形压力传感器、视频控制器、调控器以及距离传感器感应信号的lempel-ziv复杂度,对环形压力传感器、视频控制器、调控器以及距离传感器感应信号时间序列进行粗粒化处理,得到一个由0,1组成的序列s;对该序列反复执行复制和插入操作,形成由特定字符分段的新序列,新序列末尾的任何子序列均不得在原序列中出现;用新序列的分段数与其极限值之差表示该序列的相对kc复杂度,作为新特征并加入上述10个能量特征中;
26.步骤六,ls-svm多分类器的输入特征;采用主成分分析pca法进行特征降维,将原始多个特征向量表示为其中几个特征的线性组合;
27.步骤七,构建ls-svm多分类器,在标准svm目标函数中加入误差平方和项,采用径向基核函数rbf代替高维的内积运算,将输入样本映射到高维特征空间,将该问题转化为kkt条件下的线性方程组的求解;分类模式选取在任意两类样本间设置一个ls-svm分类器的一对一模式;
28.步骤八,用三组训练者的环形压力传感器、视频控制器、调控器以及距离传感器感应信号样本特征和其标定的分期,训练该ls-svm多分类器;将三组记录的样本混合,抽取2/3样本为训练集,1/3为测试集,模型训练完毕后该步骤不再进行;
29.步骤九,分别用三组训练者的环形压力传感器、视频控制器、调控器以及距离传感器感应信号样本特征送入设计好的ls-svm多分类器进行自动识别,记录分期结果,并与原始标定的分期作对比,测试所设计的ls-svm多分类器的泛化能力;
30.步骤十,对自动分阶段结果进行分析并输出。
31.进一步,训练质量评估采用基于eeg的训练评估,训练测量指标主要包括训练进程指标、训练结构指标和rem测量值;其中训练进程指标包含训练总时间、训练效率、训练维持率;训练结构指标指的是每个训练阶段n1、n2、n3及rem占总训练时间的百分比;rem测量值指rem训练潜伏期及rem活动度、rem强度、rem密度、rem周期数;
32.训练效率:
[0033][0034]
式(1)中:t
rem+nrem
是rem期和nrem期的时间之和,t
all
是实验记录数据的时间、t
rem+nrem
和训练时间之和;
[0035]
训练各期的时间比率:
[0036][0037]
式(2)中:t
x
为某个训练期t
x
所占有的时间总和,t
all
是实验记录数据的时间、
t
rem+nrem
和训练时间之和;
[0038]
训练质量比:
[0039][0040]
式(3)中由于rem训练时间占总训练时间的20%-25%;通过智能训练时相检测与质量评估系统分析出的rem时间,占总训练时间的21.53%,且训练各期所占时间比例均在正常值范围内,由此判断此用户的训练正常,训练质量良好,不存在训练障碍。
[0041]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:
[0042]
本发明通过设有三个训练臂,更好的供给训练者进行全身肢体的训练动作,设置有压力传感器和显示器,可以帮助训练者统计训练的数据参数,为后续的训练获得更好的数据参考,设置有真空发生器和吸盘装置内嵌在底座中,配合使用提高本发明在使用时的稳固性;在第一底座和第二底座之间设置缓震装置,实现在训练时候木桩回弹力,以获得更好的训练效果;设置有木桩升降控制系统,适合不同身高的人训练,本发明适合推广使用。本发明智能训练质量评估采用基于eeg的训练评估,训练测量指标主要包括训练进程指标、训练结构指标和rem测量值;其中训练进程指标包含训练总时间、训练效率、训练维持率;训练结构指标指的是每个训练阶段n1、n2、n3及rem占总训练时间的百分比;rem测量值指rem训练潜伏期及rem活动度、rem强度、rem密度、rem周期数,可判断此用户的训练正常,训练质量良好,不存在训练障碍。
附图说明
[0043]
为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
[0044]
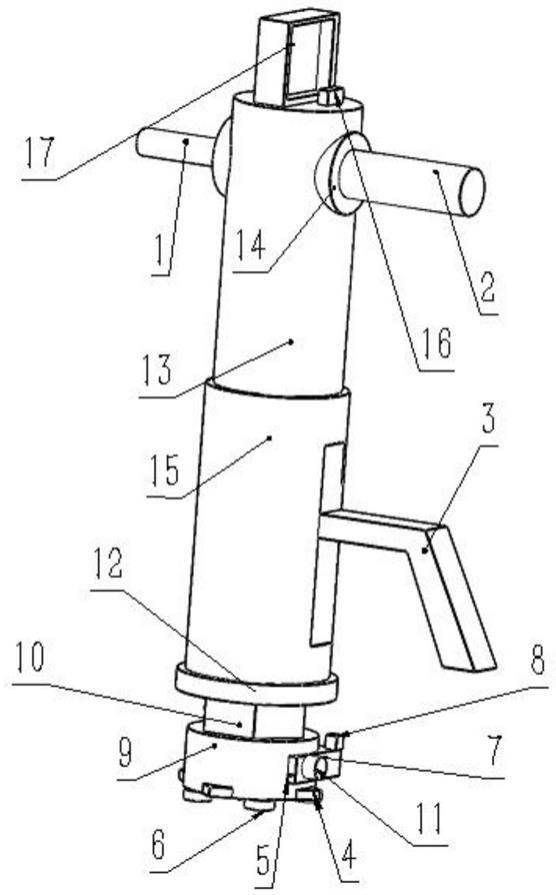
图1是本发明实施例提供的武术训练用木桩结构示意图。
[0045]
图2是本发明实施例提供的武术训练用木桩训练臂固定结构示意图。
[0046]
图3是本发明实施例提供的升降结构示意图。
[0047]
图中:1、第一训练臂;2、第二训练臂;3、第三训练臂;4、底座;5、导线;6、吸盘;7、真空发生器;8、真空发生器控制器;9、第二底座;10、减震装置;11、高精度控制器;12、第一底座;13、缓震层;14、压力传感器;15、可调节木桩;16、显示器连接一旁的显示器开关;17、显示器;18、训练臂穿孔;19、卡扣;20、卡孔;21、内部气缸。
具体实施方式
[0048]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0049]
针对现有技术存在的问题,本发明提供了一种武术训练用木桩,下面结合附图对本发明作详细的描述。
[0050]
如图1所示,本发明实施例提供的武术训练用木桩第一训练臂1、第二训练臂2、第三训练臂3、显示器17、可调节木桩15、第一底座12、第二底座9和底座4,第二底座上端通过减震装置连接第一底座;第一训练臂1和第二训练臂2是攻击训练者手部操作训练的,第三训练臂3是攻击训练者腿部和脚部训练使用的,训练者进行训练时击打训练臂,木桩内侧设有压力传感器14,压力传感器14连接可调节木桩15最上方的显示器17和显示器17一旁的显示器开关16,可以显示每次击打时候的力度数据,最终在训练完成后可以显示此次训练的全部数据,为训练者记录训练结果;真空发生器控制器内嵌四棱台4底座中,通过导线连接真空发生器7和吸盘6,实现使用真空发生器控制器8控制真空发生器7工作,进而实现控制吸盘6是否吸附于地面,气缸体连接高精度控制器11,高精度控制器11镶嵌在第一底座内,节木桩和训练臂外部包裹有海棉材质缓震层13和防滑层,真空发生器通过导线5连接真空发生器和吸盘。
[0051]
如图2所示,本发明实施例提供的第一训练臂1是穿过木桩一侧的训练臂穿孔18,在另一侧的训练臂穿孔中伸出来之后,通过将卡扣19穿过训练臂末端中的卡孔20实现固定在木桩中的。
[0052]
如图3所示,本发明实施例提供的所述的可调节木桩15的内部气缸21起落,进而实现控制可调节木桩15的起落。
[0053]
本发明的工作原理:
[0054]
首先将此训练木桩放置到合适的位置,然后操作真空发生器,控制真空发生器将吸盘中的空气清空,使得吸盘中的气压变为负压,然后通过外部的大气压强能够更好的实现固定,吸盘也就会更加紧密的吸附在地面上。操作控制器,将第一训练臂和第二训练臂的高度调整到适合自己训练的高度,然后打开显示器开关,此时木桩内部的压力传感器也开始工作,每次击打后的压力传感器读数会出现在显示器中,训练完毕后查看此次训练的数据结果,加以保存。
[0055]
在本发明一优选实施例中,所述控制器对环形压力传感器、视频控制器、调控器以及距离传感器感应的数据进行分析的方法包括:
[0056]
步骤一,根据训练分阶段标准,先将训练数据分成1-2小时的小段,用采样频率乘以数据段时间长度以求得每段数据总数据点;
[0057]
步骤二,将信号基线归零,幅度统一化为mv;
[0058]
步骤三,用巴特沃斯带通滤波器对信号进行预处理,去除干扰信号;
[0059]
步骤四,选择fir滤波器或小波包分解特征提取方法进入训练自动分阶段系统;首先用窗函数构造理想fir带通滤波器,包括由傅里叶反变换求得其对应单位脉冲响应,用有限长的窗函数将该响应截断为有限项,并将其作为滤波器的单位脉冲响应序列,最终用该序列来逼近理想fir滤波器;参数选择为,通带波纹允许误差设为0.1、幅值设为1,阻带波纹不大于允许误差0.02db;根据环形压力传感器、视频控制器、调控器以及距离传感器感应信号各特征波的频带范围构造7个fir带通滤波器,滤出k综合波、δ波、θ波、α波、梭形波及β1波和β2波各自占波段总能量的百分比;采用bio97小波基,shannon函数为代价函数,对环形压力传感器、视频控制器、调控器以及距离传感器感应信号施行5层小波包分解,取各特征波最相近的频率段所对应小波包系数重构波形,并分离出上述各特征波;联合总能量、α波与θ波的能量比率、δ波与θ波的能量比率3个能量特征,共同构成10个能量特征值,将采用fir滤
波器法和小波包分解法取得的关于训练数据的10个特征分别用ls-svm模型进行分期,与标准专家分期对比,选择平均准确率较高的特征提取方法;
[0060]
步骤五,提取环形压力传感器、视频控制器、调控器以及距离传感器感应信号的lempel-ziv复杂度,对环形压力传感器、视频控制器、调控器以及距离传感器感应信号时间序列进行粗粒化处理,得到一个由0,1组成的序列s;对该序列反复执行复制和插入操作,形成由特定字符分段的新序列,新序列末尾的任何子序列均不得在原序列中出现;用新序列的分段数与其极限值之差表示该序列的相对kc复杂度,作为新特征并加入上述10个能量特征中;
[0061]
步骤六,ls-svm多分类器的输入特征;采用主成分分析pca法进行特征降维,将原始多个特征向量表示为其中几个特征的线性组合;
[0062]
步骤七,构建ls-svm多分类器,在标准svm目标函数中加入误差平方和项,采用径向基核函数rbf代替高维的内积运算,将输入样本映射到高维特征空间,将该问题转化为kkt条件下的线性方程组的求解;分类模式选取在任意两类样本间设置一个ls-svm分类器的一对一模式;
[0063]
步骤八,用三组训练者的环形压力传感器、视频控制器、调控器以及距离传感器感应信号样本特征和其标定的分期,训练该ls-svm多分类器;将三组记录的样本混合,抽取2/3样本为训练集,1/3为测试集,模型训练完毕后该步骤不再进行;
[0064]
步骤九,分别用三组训练者的环形压力传感器、视频控制器、调控器以及距离传感器感应信号样本特征送入设计好的ls-svm多分类器进行自动识别,记录分期结果,并与原始标定的分期作对比,测试所设计的ls-svm多分类器的泛化能力;
[0065]
步骤十,对自动分阶段结果进行分析并输出。
[0066]
在本发明一优选实施例中,训练质量评估采用基于eeg的训练评估,训练测量指标主要包括训练进程指标、训练结构指标和rem测量值;其中训练进程指标包含训练总时间、训练效率、训练维持率;训练结构指标指的是每个训练阶段n1、n2、n3及rem占总训练时间的百分比;rem测量值指rem训练潜伏期及rem活动度、rem强度、rem密度、rem周期数;
[0067]
训练效率:
[0068][0069]
式(1)中:t
rem+nrem
是rem期和nrem期的时间之和,t
all
是实验记录数据的时间、t
rem+nrem
和训练时间之和;
[0070]
训练各期的时间比率:
[0071][0072]
式(2)中:t
x
为某个训练期t
x
所占有的时间总和,t
all
是实验记录数据的时间、t
rem+nrem
和训练时间之和;
[0073]
训练质量比:
[0074][0075]
式(3)中由于rem训练时间占总训练时间的20%-25%;通过智能训练时相检测与质量评估系统分析出的rem时间,占总训练时间的21.53%,且训练各期所占时间比例均在正常值范围内,由此判断此用户的训练正常,训练质量良好,不存在训练障碍
[0076]
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0077]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1