脚踏运动器械的制作方法
1.本发明涉及一种脚踏运动器械。
背景技术:
2.在非专利文献1中,公开了一种用户在保持落座的状态下,能够进行上下肢联动运动的运动器械。在非专利文献1的运动器械中,通过用户深踩踏板,从而能够进行基于椭圆轨道的运动。在专利文献1中,公开了一种用于用户以站立的状态来进行踏步动作的运动器械。
3.专利文献1:日本特表平11-503660号公报
4.非专利文献1:
5.https://www.sakaimed.co.jp/rehabilitation/exercise-therapy/car e_prevention/pre-step/
6.[日本令和2年12月9日检索]
技术实现要素:
[0007]
例如,存在有由于患有中风偏瘫或膝关节骨关节炎,从而使特定的关节的可动区域变窄的情况。在非专利文献1的脚踏运动器械中,有时会因超出上述关节的可动区域而伴随有疼痛。存在如下期望,即,想要在关节变窄了的可动区域内,利用脚踏运动器械。
[0008]
本发明提供一种抑制了该关节在关节的可动区域外进行运动的情况的脚踏运动器械。
[0009]
根据本技术的发明的观点,提供了一种脚踏运动器械,其包括:踏板主体,其供座位的利用者放置脚;踏板支承部,其以使所述踏板主体沿着脚长方向而在预定的范围内自由移动的方式对所述踏板主体进行支承;引导机构,其以使所述踏板支承部沿着预定的循环轨道进行循环移动的方式对所述踏板支承部进行引导。根据以上结构,能够抑制在关节的可动区域外该关节运动的情况。
[0010]
优选为,所述脚踏运动器械还包括阻力单元,所述阻力单元对所述踏板主体相对于所述踏板支承部的移动施加阻力。根据以上结构,能够抑制所述踏板主体相对于所述踏板支承部的非意图的移动。
[0011]
优选为,所述阻力单元为,连结所述踏板支承部和所述踏板主体并沿着所述脚长方向而延伸的弹性体。根据以上结构,能够廉价地实现所述阻力单元。
[0012]
优选为,所述弹性体在于所述脚长方向上不同的两个位置处被安装在所述踏板支承部上,所述踏板主体在所述两个位置之间被安装在所述弹性体上。根据以上结构,能够廉价地实现所述阻力单元。
[0013]
优选为,所述踏板主体以可装卸的方式被安装在所述弹性体上。根据以上结构,能够根据使所述踏板主体相对于所述踏板支承部而进行移动的方向,从而改变由所述阻力单元产生的阻力。例如,由于如果将所述踏板主体以靠近腿尖的方式固定在所述弹性体上,则
在使所述踏板主体相对于所述踏板支承部而相对地向脚跟侧移动时会被赋予较强的阻力,因此能够模拟站立时踢地面的动作。此外,在这种情况下,由于能够较大地确保向脚跟侧的可移动量,因此能够模拟较大步幅下的步行。另一方面,如果将所述踏板主体以靠近脚跟的方式固定在所述弹性体上,则在使所述踏板主体相对于所述踏板支承部而相对地向脚尖侧移动时就会被赋予较强的阻力。
[0014]
优选为,所述弹性体为橡胶管。
[0015]
根据本发明,能够抑制该关节在关节的可动区域外进行运动的情况。
[0016]
本公开的上述和其他目的、特征和优点将从下文给出的详细描述和附图中得到更充分的理解,附图仅作为说明,因此不应被认为是对本公开的限制。
附图说明
[0017]
图1为示意性地表示运动器械的结构的立体图。
[0018]
图2为示意性地表示运动器械的结构的立体图。
[0019]
图3为踏板单元的侧视图。
[0020]
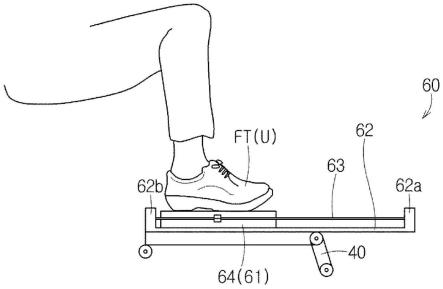
图4为踏板单元的侧视图,且为表示用户将脚放置在踏板主体上并使踏板主体向脚跟侧滑动的状态的图。
[0021]
图5为踏板单元的侧视图,且为表示用户将脚放置在踏板主体上并使踏板主体向脚尖侧滑动的状态的图。
[0022]
图6为踏板单元的侧视图,且为表示用户将脚放置在踏板主体上的状态的图。
[0023]
图7为踏板单元的侧视图,且为将踏板主体的安装位置设为脚尖侧的图。
[0024]
图8为踏板单元的侧视图,且为将踏板主体的安装位置设为脚跟侧的图。
具体实施方式
[0025]
以下,虽然通过发明的实施方式来对本发明进行说明,但并非将权利要求书所涉及的发明限定为以下的实施方式。此外,在实施方式中所说明的结构的全部内容并不一定是作为用于解决课题的方法而必须的。为了说明的明确化,在以下的记载以及附图中,适当作出了省略以及简化。在各个附图中,对于相同的要素标记相同的符号,并根据需要而省略了重复说明。
[0026]
本实施方式所涉及的运动器械为,用户用于进行脚踏运动的脚踏运动器械。关于本实施方式所涉及的运动器械100,将使用图1以及图2来进行说明。图1以及图2为,从侧方对运动器械100进行观察时的图。另外,在以下的说明中,为了说明的明确化,而使用xyz三维正交座标系来进行说明。具体而言,+x方向成为前方向,-x方向成为后方向、+y方向成为上方向,-y方向成为下方向,+z方向成为左方向,-z方向成为右方向。前后方向、左右方向、上下方向为,以用户u的方向为基准的方向。
[0027]
运动器械100为,能够对脚关节的可动范围进行调节的器械。在以下的说明中,将脚关节的围绕z轴的旋转方向设为跖背屈方向,并将其角度设为跖背屈角度。更具体而言,将脚ft的脚尖朝向下方的方向设为跖屈方向,将脚尖朝向上方的方向设为背屈方向。
[0028]
如图1所示那样,运动器械100具有主体部20、连杆30、踏板单元60、曲柄40、以及倾斜台50。在运动器械100的后方设置有椅子10。用户u在落座于椅子10上的状态下,进行脚踏
运动。因此,椅子10成为供用户u落座的落座部。另外,椅子10既可以与运动器械100一体设置,也可以作为分体来设置。例如,椅子10也可以为,处于用户u所在的设施或者自家住宅等中的椅子。也就是说,用户u或者辅助人员也可以将椅子10设置在运动器械100的后方处。
[0029]
另外,在运动器械100中,被安装在主体部20上的结构要素成为左右对称。在图2中,为了对左右的结构要素进行区分,从而对主体部20的左侧的结构要素标记l,对右侧的结构要素标记r。例如,在图2中,左侧的倾斜台50作为倾斜台50l而被示出,右侧的倾斜台50作为倾斜台50r而被示出。同样地,左侧的踏板单元60成为踏板单元60l,右侧的连杆30以及踏板单元60成为连杆30r以及踏板单元60r。同样地,将左侧的脚ft设为左脚ftl,将右侧的脚ft设为右脚ftr。另外,在以下的说明中,在不对左右的结构要素进行区分的情况下,将省略l和r。
[0030]
主体部20以可旋转的方式对曲柄40进行保持。例如,在主体部20上,设置有旋转轴21。在旋转轴21上,连结有曲柄40。曲柄40围绕旋转轴21进行旋转。主体部20也可以具有向曲柄40的旋转运动赋予负载的负载阻力体。另外,主体部20也可以具有用于使负载可变的齿轮等。主体部20也可以相对于地板面而被固定。
[0031]
连杆30中设置有滑行轮35。在连杆30的前端上连结有曲柄40,在后端上连结有滑行轮35。曲柄40和连杆30以可旋转的方式被连结在一起。例如,连杆30经由轴承等而被安装在曲柄40上。在连杆30上,安装有踏板单元60。
[0032]
在图3中,示出了被安装在连杆30上的踏板单元60。如图3所示那样,踏板单元60包括踏板主体61、踏板支承部62和橡胶管63。
[0033]
踏板主体61包括供用户u将脚ft放置于其上的踏板64、用于将踏板64与橡胶管63的任意的位置连结的管夹65。管夹65包括被固定在踏板64的侧面上的管承接部65a、与管承接部65a在y方向上对置的管盖部65b、在通过管承接部65a和管盖部65b而夹持了橡胶管63的状态下将管盖部65b向管承接部65a按压并发挥夹紧力的螺丝机构65c。
[0034]
踏板支承部62以使踏板主体61沿着脚长方向而在预定的范围内自由移动的方式对踏板主体61进行支承。具体而言,踏板支承部62以使踏板主体61沿着连杆30的长度方向而自由移动的方式对踏板主体61进行支承。踏板支承部62被固定在连杆30上。踏板支承部62沿着连杆30的长度方向而延伸。连杆30的脚跟侧的端部和踏板支承部62的脚跟侧的端部62b在连杆30的长度方向上位置被对齐。踏板支承部62的脚尖侧的端部62a与连杆30的脚尖侧的端部相比进一步向脚尖侧突出。因此,连杆30与踏板支承部62相比较短。在本实施方式中,连杆30的长度被设为,踏板支承部62的长度的大概三分之二。
[0035]
对于橡胶管63而言,一端被固定在踏板支承部62的脚尖侧的端部62a上,另一端被固定在踏板支承部62的脚跟侧的端部62b上。即,橡胶管63从踏板支承部62的端部62a起延伸直至端部62b为止。橡胶管63在被稍微拉伸的状态下被张挂在踏板支承部62上。但是,也可以代替这种方式,使橡胶管63在保持自然长度的状态下被张挂在踏板支承部62上。橡胶管63为弹性体的一个具体示例。作为弹性体,也可以采用橡皮筋或者螺旋弹簧,以代替橡胶管。
[0036]
在本实施方式中,踏板主体61在没有让脚ft放置在踏板主体61上的状态下,以使踏板64位于踏板支承部62的端部62a与端部62b的正中间处的方式,与橡胶管63相连结。在该中立状态下,当踏板主体61相对于踏板支承部62而向脚尖侧进行相对移动时,橡胶管63
将在踏板主体61与端部62b之间被拉伸,通过橡胶管63的弹性复原力,从而使踏板主体61相对于踏板支承部62而向脚跟侧被相对拉伸。同样地,在上述的中立状态下,当踏板主体61相对于踏板支承部62而向脚跟侧进行相对移动时,橡胶管63将在踏板主体61与端部62a之间被拉伸,通过橡胶管63的弹性复原力,从而使踏板主体61相对于踏板支承部62而向脚尖侧被相对拉伸。
[0037]
返回至图1,滑行轮35经由旋转轴(车轴)而被安装在连杆30上。也就是说,连杆30以可旋转的方式对滑行轮35进行保持。滑行轮35成为在倾斜台50的倾斜面51上进行滑行的滑行部件。
[0038]
用户u将脚ft放置在踏板单元60的踏板主体61的踏板64上,从而进行脚踏运动。也就是说,用户u以深踩脚ft的方式来活动膝关节或股关节。由此,曲柄40围绕旋转轴21进行旋转。进一步地,根据曲柄40的旋转,从而使连杆30与曲柄40之间的角度发生变化。也就是说,根据曲柄40的旋转角度(也称为曲柄角度),从而使连杆30相对于曲柄40的相对角度发生变化。此外,滑行轮35在与倾斜台50的倾斜面51接触的状态下,在前后方向上进行移动。由此,根据脚踏运动,从而以踏板单元60的踏板支承部62描绘椭圆轨道的方式,而使曲柄40以及连杆30进行旋转动作。椭圆轨道为,循环轨道的一个具体示例。作为循环轨道,也可以采用圆轨道。
[0039]
主体部20、连杆30、曲柄40以及倾斜台50构成了以使踏板支承部62沿着预定的循环轨道而循环移动的方式对踏板支承部62进行引导的引导机构。
[0040]
另外,踏板单元60、滑行轮35、连杆30、曲柄40、倾斜台50相对于用户u的左右脚ft而被分别设置。也就是说,在主体部20的左右分别设置有踏板单元60、滑行轮35、连杆30、曲柄40、倾斜台50。被设置于主体部20的右侧的踏板单元60r、滑行轮35r、连杆30r、倾斜台50r等对应于用户u的右脚ftr。被设置于主体部20的左侧的踏板单元60l、滑行轮35l、连杆30l、倾斜台50l对应于用户u的左脚ftl。
[0041]
曲柄40以相对于左右脚ft而成为相反相位的方式被安装在主体部20的旋转轴21上。也就是说,左脚用的曲柄40和右脚用的曲柄40的旋转角度错开180
°
。用户u使左脚以及右脚交替伸缩,从而进行脚踏运动。
[0042]
在连杆30的下端上,安装有滑行轮35。滑行轮35具有在倾斜台50的倾斜面51上进行滑行的轮。倾斜台50具有越向后方越变高这样的倾斜面51。滑行轮35根据连杆30的旋转运动,从而在x方向(前后方向)上进行往复移动。如图1所示那样,在用户u向伸出右脚且使左脚弯曲的方向进行脚踏运动的期间内,右侧的滑行轮35向前方移动,左侧的滑行轮35向后方移动。如图2所示那样,在用户u向伸出左脚且使右脚弯曲的方向进行脚踏运动的期间内,左侧的滑行轮35向前方移动,右侧的滑行轮35向后方移动。
[0043]
滑行轮35的高度沿着倾斜台50的倾斜面51而发生变化。倾斜台50越向后方倾斜面51的高度越高。也就是说,倾斜台50相对于向后方移动的滑行轮35而成为上坡。因此,在滑行轮35向后方前进的期间内,滑行轮35逐渐变高。相反地,在滑行轮35向前方前进的期间内,滑行轮35逐渐变低。根据滑行轮35的高度,从而规定了连杆30的角度。
[0044]
在此,根据滑行轮35的高度,从而限制了被设置在连杆30上的踏板单元60的角度。也就是说,当滑行轮35变高时,踏板单元60向跖屈方向进行旋转。当滑行轮35变低时,踏板单元60向背屈方向进行旋转。因此,能够根据倾斜台50的倾斜角度,从而对脚关节的跖背屈
角度的可动范围进行调节。能够根据曲柄40的旋转角度,从而对脚关节的跖背屈角度的可动范围进行调节。
[0045]
图4中,示出了用户u将脚ft放置在踏板主体61的踏板64上的状态。图5中,示出了踏板主体61相对于踏板支承部62而相对地向后方移动的情况。图6中,示出了踏板主体61相对于踏板支承部62而相对地向前方移动的情况。
[0046]
以此方式,通过使踏板主体61相对于踏板支承部62而在脚长方向上自由移动,从而能够抑制在使用了运动器械100的脚踏运动过程中各个关节的关节角度成为各个关节的可动区域外的情况。
[0047]
例如,当脚踝关节欲超过脚踝关节的关节角度的向跖屈方向的界限而向跖屈方向伸展时,通过踏板主体61相对于踏板支承部62而相对地向脚跟侧移动,从而能够阻止脚踝关节的向跖屈方向的伸展。
[0048]
同样地,例如,当脚踝关节欲超过脚踝关节的关节角度的向背屈方向的限界而向背屈方向弯曲时,通过踏板主体61相对于踏板支承部62而相对地向脚尖侧移动,从而能够阻止脚踝关节的向背屈方向的弯曲。
[0049]
因此,即使在脚踝关节的关节角度的可动范围与健康的情况相比而变窄的情况下,也能够在不勉强的条件下使用运动器械100来实施脚踏运动。在膝关节或股关节的关节角度的可动范围与健康的情况相比而变窄的情况下,也是同样的。
[0050]
此外,通过使踏板主体61相对于踏板支承部62而在脚长方向上自由移动,从而能够使踏板主体61所描绘的椭圆轨道、典型而言为椭圆轨道的长轴较长。在此,椭圆轨道的长轴的尺寸与脚踏运动中的膝关节的关节角度的变动幅度成正比例。因此,通过使踏板主体61相对于踏板支承部62而在脚长方向上自由移动,从而能够灵活地应对膝关节的关节角度的各种各样的变动幅度。
[0051]
另外,典型而言,像图1那样,在用户u向伸出右脚且使左脚弯曲的方向进行脚踏运动的期间内,右侧的踏板主体61将如图6所示那样相对于右侧的踏板支承部62而相对地向前方移动,左侧的踏板主体61将如图5所示那样相对于左侧的踏板支承部62而相对地向后方移动。像图2那样,在用户u向伸出左脚且使右脚弯曲的方向进行脚踏运动的期间内,右侧的踏板主体61将如图5所示那样相对于右侧的踏板支承部62而相对地向后方移动,左侧的踏板主体61将如图6所示那样相对于左侧的踏板支承部62而相对地向前方移动。
[0052]
此外,运动器械100为,可同时锻炼股四头肌以及髂腰肌的运动器械。由于在脚踏运动中踏板主体61向前后滑动,因此能够获得如下运动效果,即,仅通过进行脚踏,就使得膝关节的可动区域在伸展侧、弯曲侧均发生扩张。考虑较为重要的是,运动器械100抑制了拮抗肌的收缩,防止了继发性的关节可动区域限制或者关节角度区域改善的延迟。由于在膝关节的伸展时如图6所示那样脚踝关节成为跖屈位,在膝关节的弯曲时如图5所示那样脚踝关节成为背屈位,因此能够较大地确保脚踏运动中的脚踝关节的关节角度的变动幅度。
[0053]
虽然在上文中,对本发明的优选的实施方式进行了说明,但是上述实施方式具有以下的特征。
[0054]
运动器械100包括:踏板主体61,其供座位的用户u(利用者)放置脚;踏板支承部62,其以使踏板主体61沿着脚长方向(footlengthdirection)而在预定的范围内自由移动的方式对踏板主体61进行支承;引导机构,其以使踏板支承部62沿着预定的循环轨道进行
循环移动的方式对踏板支承部62进行引导。根据以上的结构,能够抑制在股关节、膝关节、脚踝关节等各个关节的可动区域外该关节运动的情况。在上述实施方式中,引导机构由主体部20、连杆30、曲柄40以及倾斜台50构成。
[0055]
此外,还包括橡胶管63(阻力单元),所述橡胶管63对踏板主体61相对于踏板支承部62的移动施加阻力。根据以上结构,由于能够抑制踏板主体61相对于踏板支承部62的非意图的移动,因此能够实现顺畅的脚踏运动。
[0056]
此外,橡胶管63(阻力单元)为,连结踏板支承部62和踏板主体61并沿着脚长方向而延伸的弹性体。根据以上结构,能够廉价地实现阻力单元。
[0057]
此外,橡胶管63在于脚长方向上不同的两个位置(端部62a、端部62b)处被安装在踏板支承部62上。踏板主体61在两个位置(端部62a、端部62b)之间被安装在弹性体上。根据以上结构,能够廉价地实现阻力单元。
[0058]
踏板主体61以可装卸的方式被安装在橡胶管63上。根据以上结构,能够根据使踏板主体61相对于踏板支承部62而进行移动的方向,从而改变由橡胶管63产生的阻力。例如,如图7所示那样,由于如果将踏板主体61在靠近端部62a的位置处固定在橡胶管63上,则在使踏板主体61相对于踏板支承部62而相对地向脚跟侧移动时会被赋予较强的阻力,因此能够模拟站立时踢地面的动作。此外,在这种情况下,由于能够较大地确保向脚跟侧的可移动量,因此能够模拟较大步幅下的步行,从而能够期待扩张关节可动区域的运动效果。另一方面,如果如图8所示那样,将踏板主体61在靠近端部62b的位置处固定在橡胶管63上,则在使踏板主体61相对于踏板支承部62而相对地向脚尖侧移动时,会被赋予较强的阻力。
[0059]
另外,可以省略图1以及图2所示的倾斜台50以及滑行轮35。在上述实施方式中,引导机构由主体部20、连杆30、曲柄40以及倾斜台50构成。但是,代替于此,引导机构也可以由主体部20、连杆30、曲柄40构成。
[0060]
从这样描述的公开中,显而易见的是,本公开的实施例可以以多种方式改变。此类变更不应被视为偏离本发明的主旨和范围,并且对于本领域技术人员而言,显而易见的所有此类修改均被包括在所附的权利要求书的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1