一种模拟地形的智能跑步机的制作方法
1.本实用新型属于的技术领域,具体涉及一种模拟地形的智能跑步机。
背景技术:
2.跑步机是一种十分常用的健身器械,健身人员通过在皮带组件上跑动进行锻炼。但是传统的跑步机大多为水平设置,相当于模拟的水平路面;部分跑步机倾斜设置皮带组件用于模拟倾斜路面,但是倾斜方向均为前后倾斜,并未模拟实际路面存在的左右倾斜的情况,进而造成跑步体验不够逼真。
技术实现要素:
3.本实用新型的目的在于提供一种模拟地形的智能跑步机,实现对水平路面、前后倾斜路面、左右倾斜路面的模拟,使得跑步体验更加逼真。
4.本实用新型通过下述技术方案实现:
5.一种模拟地形的智能跑步机,包括安装基座,所述安装基座上设置有承载座,所述承载座的顶部设置有跑步皮带组件,还包括对应承载座的底部四角处设置的四个伸缩支撑装置,所述伸缩支撑装置的底端与安装基座的顶部万向铰接,所述伸缩支撑装置的顶端与承载座的底部万向铰接;所述承载座上设置有用于检测承载座倾角的倾角检测传感器以及与倾角检测传感器连接并用于调节伸缩支撑装置伸缩量的伸缩控制装置。
6.四个伸缩支撑装置分别独立对承载座底部的四个角点位置进行支撑,通过控制伸缩支撑装置的伸缩支撑高度。当四个伸缩支撑装置的伸缩支撑高度相同时,承载座底部的四个角点位置之间没有高度差,此时承载座呈水平状态,模拟实际跑步环境中的水平路面。
7.当四个伸缩支撑装置的伸缩支撑高度不同时,进而使得承载座底部的四个角点位置出现高度差,进而使得承载座呈现出不同方向不通倾角的倾斜状态,进而模拟实际跑步环境中的斜坡。
8.同时通过倾角检测传感器实时检测承载座的倾斜角度,并将倾斜角度反馈至伸缩控制装置,伸缩控制装置根据倾斜角度实时控制伸缩支撑装置的伸缩支撑高度,进而实现对承载座倾斜角度的实时调节。
9.需要进一步说明的是,本技术中承载座在前后方向以及左右方向上的倾斜角度小于等于20
°
,即伸缩支撑装置仅针对倾斜角度小于等于20
°
的情况进行模拟调节。
10.为了更好的实现本实用新型,进一步地,所述安装基座上还设置有手扶架,所述手扶架上对应人脸设置有显示操作面板,所述显示操作面板中内置有地图模块和控制器,所述控制器通过伸缩控制装置控制伸缩支撑装置的伸缩量;所述跑步皮带组件上设置有与控制器连接的步距传感装置与压力传感装置。
11.健身人员通过扶持手扶架保持身体的平衡与稳定,同时健身人员可以通过显示操作面板进行可视化操作,显示操作面板中内置的地图模块包含若干对应不同实际环境的虚拟地图,健身人员可以通过地图模块选取相应的虚拟地图,控制器则根据虚拟地图中的地
形实时控制伸缩控制装置控制伸缩支撑装置的伸缩支撑量,进而模拟不同地形对应的倾斜角度。
12.同时通过设置在跑步皮带组件上的步距传感装置检测人体跑步的步距,通过设置在跑步皮带组件上的压力传感装置检测人体的步频,并将步距数据与步频数据发送至控制器。
13.为了更好的实现本实用新型,进一步地,还包括人体监测手环与vr眼镜,所述人体监测手环与vr眼镜均与控制器连接,所述人体监测手环用于监测人体的血压、血氧、脉搏的数据,并将人体数据发送至控制器;所述vr眼镜根据在地图模块中选择的地形实时显示虚拟地图影像。
14.为了更好的实现本实用新型,进一步地,所述手扶架靠近人体的一侧设置有与控制器连接的安全气囊防撞装置与撞击压力传感器,当人体侧翻撞击手扶架侧面的撞击压力传感器时,当撞击力超过撞击压力传感器预先设定的阈值,则撞击压力传感器发送信号至控制器,控制器即控制安全气囊防撞装置启动,对人体进行防撞缓冲,避免人体受伤。
15.需要说明的是,对撞击压力传感器设置阈值是为了避免人体在没有侧翻时普通触碰到撞击压力传感器时造成误判,只有当撞击力大于等于撞击压力传感器设置阈值,才表明人体发生侧翻,此时撞击压力传感器才向控制器反馈信号,控制器才控制安全气囊防撞装置启动。
16.为了更好的实现本实用新型,进一步地,所述安全气囊防撞装置包括充气阀以及与充气阀的充气端连接的安全气囊,所述充气阀与控制器连接。
17.为了更好的实现本实用新型,进一步地,所述跑步皮带组件包括驱动转轴、从动转轴、皮带、调速马达,所述皮带传动设置在驱动转轴与从动转轴之间,所述调速马达通过驱动转轴带动皮带。控制器根据接收到的步距、步频、血氧、脉搏、血压控制调速马达的转速,进而控制驱动转轴的转速,进而控制皮带的传输速度。
18.为了更好的实现本实用新型,进一步地,所述伸缩支撑装置为伸缩汽缸,所述伸缩控制装置包括储气筒,所述储气筒的出气端设置有分别与四个伸缩汽缸连接的气体管路,所述气体管路上设置有电磁阀和流量阀。
19.本实用新型与现有技术相比,具有以下优点及有益效果:
20.(1)本实用新型通过在承载座底部的四角处分别设置四个可以独立伸缩和转动的伸缩支撑装置,并通过伸缩控制装置根据实际的水平或倾斜路面控制伸缩支撑装置进行伸缩,当四个伸缩支撑装置的伸缩方向及伸缩量相同时,则承载座及跑步皮带组件呈水平状态,用于模拟水平路面;当前端的伸缩支撑装置与后端的伸缩支撑装置出现伸缩量差值时,则承载座及跑步皮带组件呈前后倾斜状态,用于模拟前后倾斜的路面;当左端的伸缩支撑装置与右端的伸缩支撑装置出现伸缩量差值时,则承载座及跑步皮带组件呈左右倾斜状态,用于模拟左右倾斜的路面;最终实现对不同路面情况的模拟,使得健身人员的跑步体验更加逼真;
21.(2)本实用新型通过人体监测手环监测人体的血氧、血压、脉搏数据,进而实时监测人体健康;同时通过vr眼镜向健身人员展示虚拟地图,使得跑步体验更加逼真;
22.(3)本实用新型通过在手扶架靠近人体的侧面上设置安全气囊防撞装置,当人体发生侧翻时,安全气囊防撞装置及时充气避免人体撞伤。
附图说明
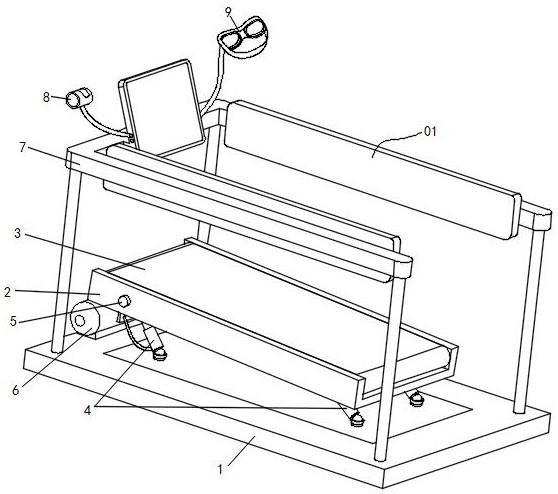
23.图1为本实用新型的整体结构示意图;
24.图2为图1的左视剖视图;
25.图3为图1的前视图。
26.其中:1
‑
安装基座;2
‑
承载座;3
‑
跑步皮带组件;4
‑
伸缩支撑装置;5
‑
倾角检测传感器;6
‑
伸缩控制装置;7
‑
手扶架;8
‑
人体监测手环;9
‑
vr眼镜;01
‑
安全气囊防撞装置。
具体实施方式
27.实施例1:
28.本实施例的一种模拟地形的智能跑步机,如图1
‑
图3所示,包括安装基座1,所述安装基座1上设置有承载座2,所述承载座2的顶部设置有跑步皮带组件3,还包括对应承载座2的底部四角处设置的四个伸缩支撑装置4,所述伸缩支撑装置4的底端与安装基座1的顶部万向铰接,所述伸缩支撑装置4的顶端与承载座2的底部万向铰接;所述承载座2上设置有用于检测承载座2倾角的倾角检测传感器5以及与倾角检测传感器5连接并用于调节伸缩支撑装置4伸缩量的伸缩控制装置6。
29.承载座2底部四角处设置有球铰接头,安装基座1的顶部对应设置有球铰接头,伸缩支撑装置4的底部通过球头与安装基座1上的球铰接头万向铰接,伸缩支撑装置4的顶部通过球头与承载座2底部的球铰接头万向铰接,每一个伸缩支撑装置4可以绕着铰接点进行独立的转动伸缩。
30.通过伸缩控制装置6独立控制每一个伸缩支撑装置4的伸缩量,当四个伸缩支撑装置4的伸缩量及倾斜方向相同,承载座2处于水平状态,用于模拟实际环境中的水平路面。
31.为了便于说明,将四个伸缩支撑装置4区分为前左伸缩支撑装置、前右伸缩支撑装置、后左伸缩支撑装置、后右伸缩支撑装置。
32.前左伸缩支撑装置、前右伸缩支撑装置的伸出量与倾斜方向相同,后左伸缩支撑装置、后右伸缩支撑装置的伸出量与倾斜方向相同,且前左伸缩支撑装置与前右伸缩支撑装置的伸出量大于后左伸缩支撑装置与后右伸缩支撑装置的伸出量时,此时承载座2处于前端高后端低的倾斜状态;反之,则承载座2处于前端低后端高的倾斜状态,用于模拟实际环境中前后倾斜的路面。
33.前左伸缩支撑装置、后左伸缩支撑装置的伸出量与倾斜方向相同,前右伸缩支撑装置、后右伸缩支撑装置的伸出量与倾斜方向相同,且前左伸缩支撑装置与后左伸缩支撑装置的伸出量大于前右伸缩支撑装置与后右伸缩支撑装置的伸出量时,此时承载座2处于左端高右端低的倾斜状态;反之,则承载座2处于左端低右端高的倾斜状态,用于模拟实际环境中左右倾斜的路面。
34.同时通过倾角检测传感器5实时检测承载座2的倾斜角度,伸缩控制装置6根据倾角数据实时控制伸缩支撑装置4的伸出量与伸出方向,进而模拟不同方向倾角的路面,使得健身人员能够通过跑步皮带组件3模拟不同路面情况进行跑步。
35.实施例2:
36.本实施例在实施例1的基础上做进一步优化,如图1
‑
图3所示,所述安装基座1上还设置有手扶架7,所述手扶架7上对应人脸设置有显示操作面板,所述显示操作面板中内置
有地图模块和控制器,所述控制器通过伸缩控制装置6控制伸缩支撑装置4的伸缩量;所述跑步皮带组件3上设置有与控制器连接的步距传感装置与压力传感装置。
37.健身人员可在显示操作面板的地图模块中选择载入不同的虚拟地图,控制器则将虚拟地图中的路面数据发送至伸缩控制装置6,伸缩控制装置6进而根据路面数据控制伸缩支撑装置4的伸缩量,将承载座2和跑步皮带组件3实时调节至不同的倾斜或水平状态,使得健身人员跑步体验更加逼真。
38.跑步皮带组件3上设置的步距传感装置,所述步距传感装置为沿着跑步皮带组件3运动方向线性设置的若干光栅,当健身人员跑动时,双腿遮挡不同的光栅,通过计算被遮挡的两个光栅之间的间距,进而得到健身人员跑步的步距;跑步皮带组件3上设置的压力传感装置包括设置在跑步皮带组件3的前端、中部、后端的压力传感器,当健身人员踩踏跑步皮带组件3时,压力传感器受压并发送一次信号至控制器,控制器计数压力传感器在单位时间内传输的压力信号的次数,进而得到健身人员跑步的步频。
39.上述控制器的型号为gpm8f3732,为成熟的现有产品,其具体结构及使用原理在此不再赘述;上述光栅的型号为ay20a,为成熟的现有产品,其具体结构及使用原理在此不再赘述;上述压力传感器的型号为bt
‑
35,为成熟的现有产品,其具体结构及使用原理在此不再赘述。
40.本实施例的其他部分与实施例1相同,故不再赘述。
41.实施例3:
42.本实施例在上述实施例1或2的基础上做进一步优化,如图1
‑
图3所示,还包括人体监测手环8与vr眼镜9,所述人体监测手环8与vr眼镜9均与控制器连接,所述人体监测手环8用于监测人体数据,所述vr眼镜9根据地图模块实时显示虚拟地图影像。
43.人体监测手环8与vr眼镜9通过连接线或蓝牙、wifi等无线连接的方式与控制器连接,健身人员佩戴人体监测手环8后,即可通过人体监测手环8实时监测人体的血压、血氧、脉搏的数据并将数据发送至控制器,控制器将血压、血氧、脉搏的数据发送至显示操作面板的显示屏上进行显示,同时控制器将血压、血氧、脉搏的数据发送至vr眼镜9,使得健身人员能够及时直观得到自己的身体数据。
44.控制器同时将地图模块中的虚拟地图的模型发送至vr眼镜9进行展示,使得健身人员跑步更加逼真。
45.上述人体监测手环8已经在专利号为“cn104352229b”的专利文件中公开,其具体结构及使用方法在此不再赘述;上述vr已经在专利号为“cn210835440u”的专利文件中公开,其具体结构及使用方法在此不再赘述。
46.本实施例的其他部分与上述实施例1或2相同,故不再赘述。
47.实施例4:
48.本实施例在上述实施例1
‑
3任一项的基础上做进一步优化,如图1
‑
图3所示,手扶架7靠近人体的一侧设置有与控制器连接的安全气囊防撞装置01与撞击压力传感器。
49.撞击压力传感器设置有触发阈值,触发阈值大于等于150n,当撞击力小于150n时,撞击压力传感器不会向控制器发送信号,避免健身人员正常触碰撞击压力传感器时造成误报。当健身人员发生侧翻时,人体对撞击压力传感器的撞击力会大于150n,此时撞击压力传感器发送信号至控制器,控制器控制安全气囊防撞装置01中的气囊充气,避免人体撞伤。
50.本实施例的其他部分与上述实施例1
‑
3任一项相同,故不再赘述。
51.实施例5:
52.本实施例在上述实施例1
‑
4任一项的基础上做进一步优化,所述安全气囊防撞装置包括充气阀以及与充气阀的充气端连接的安全气囊,所述充气阀与控制器连接。
53.安全气囊设置在手扶架7靠近人体的一侧,当控制器接受到撞击压力传感器发送的信号时,控制器即控制充气阀向安全气囊充气,使得安全气囊膨胀对人体进行缓冲,避免人体撞伤。
54.本实施例的其他部分与上述实施例1
‑
4任一项相同,故不再赘述。
55.实施例6:
56.本实施例在上述实施例1
‑
5任一项的基础上做进一步优化,所述跑步皮带组件3包括驱动转轴、从动转轴、皮带、调速马达,所述皮带传动设置在驱动转轴与从动转轴之间,所述调速马达通过驱动转轴带动皮带。
57.驱动转轴通过轴承座转动设置在承载座2的前端,从动转轴通过轴承座转动设置在承载座2的后端,驱动转轴与从动转轴之间传动绕设有皮带,驱动转轴的一端与调速马达的输出端连接。通过调速马达带动驱动转轴转动,进而带动皮带和从动转轴,实现跑步功能。
58.本实施例的其他部分与上述实施例1
‑
5任一项相同,故不再赘述。
59.实施例7:
60.本实施例在上述实施例1
‑
6任一项的基础上做进一步优化,所述伸缩支撑装置4为伸缩汽缸,所述伸缩控制装置6包括储气筒,所述储气筒的出气端设置有分别与四个伸缩汽缸连接的气体管路,所述气体管路上设置有电磁阀和流量阀。
61.储气筒设置在安装基座1的前端,储气筒用于储存气体,储气筒靠近承载座2的一侧上设置有四个出气口,出气口通过气体管路与伸缩气缸的内腔连通,且气体管路上设置有电磁阀和流量阀,控制器通过电磁阀控制气体管路的通断,控制器通过流量阀控制气体管路中气体的流量,进而使得伸缩气缸的伸缩更加平稳。
62.本实施例的其他部分与上述实施例1
‑
6任一项相同,故不再赘述。
63.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型做任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化,均落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1