玩具机械手掌的制作方法
1.本实用新型是关于一种涉及于玩具技术领域,尤其涉及一种玩具机械手掌。
背景技术:
2.机器人元素一直是玩具市场长久不衰的经典元素之一,其被大量应用于仿真玩具中,如仿照模型人、仿照手掌等,通过精美仿真的外观吸引儿童注意。然而现有的手掌玩具功能单一,多数仅以精美仿真的外观作为卖点吸引儿童注意,趣味性和实用性不高,难以长期吸引儿童关注。
技术实现要素:
3.本实用新型提出一种玩具机械手掌,解决现有的手掌玩具缺乏趣味性和实用性的缺点,实现增强趣味性和实用性以提高儿童关注度的目的。
4.为了可达到前述的目的,本实用新型提供一种玩具机械手掌,包括本体、手指和移动块,其中所述本体内设有一空腔,所述空腔与外部连通;所述手指通过第一弹簧弹性连接于所述本体上,且所述手指的中部转动连接于所述本体上,所述手指的一端凸伸于所述本体外,所述手指的另一端位于所述本体内并与所述移动块可分离地连接;所述移动块通过第二弹簧弹性连接于所述本体上、并受所述手指控制可相对移动地连接于所述空腔内,且所述移动块朝向所述空腔开口的端部连接有可食用部分;
5.所述第一弹簧被设定为拉伸弹簧或扭簧,所述第二弹簧被设定为异形扭转弹簧,所述异形扭转弹簧包括簧体、及沿所述簧体向外延伸的第一力臂和第二力臂,其中所述第一力臂呈直杆状设置并固定于所述本体上,所述第二力臂呈m字形设置并固定于所述移动块上。
6.作为优选方案,所述移动块包括抵接块、沿所述抵接块的其中一端向外延伸的固定杆、及位于所述抵接块上的固定部,其中所述固定杆上附着有所述可食用部分,所述固定部对应与所述第二力臂连接。
7.作为优选方案,所述玩具机械手掌还包括一限位板,所述限位板对应于所述空腔固定于所述本体内,且所述限位板上凸伸有限位块,所述限位块相对于所述移动块的一侧设置并与所述移动块可抵触地连接。
8.作为优选方案,所述移动块还包括一限制部,所述限制部位于所述抵接块上邻近所述可食用部分的边沿位置,且所述限制部与所述限位块可抵触地连接。
9.作为优选方案,所述手指包括一体成型设置的枢接部、控制部和抵触部,其中所述枢接部可转动地连接于所述本体上,所述控制部和所述抵触部分别位于所述枢接部相对的两侧上,且所述控制部朝向所述本体外延伸,所述抵触部位于所述本体内并与所述移动块可分离地连接,所述枢接部或所述抵触部通过所述第一弹簧弹性连接于所述本体上。
10.作为优选方案,所述本体包括固定连接的第一壳体和第二壳体,其中所述第一壳体上凸伸有一第一连接柱,所述第一连接柱上连接有所述第一力臂,所述第二壳体上可拆
卸地连接有一装饰板。
11.作为优选方案,所述第一壳体上还凸伸有一第二连接柱,所述第二连接柱上连接有所述第一弹簧。
12.作为优选方案,所述本体还包括封盖,所述封盖对应连接于所述空腔的开口端处,且所述封盖的一端铰接于所述第一壳体和所述第二壳体的连接处,所述封盖的另一端可分离地与所述第一壳体和所述第二壳体连接。
13.因此依据本实用新型的技术手段,本实用新型可以获得的功效简要说明如下所述:本实用新型所提供的玩具机械手掌在现有的手掌玩具的基础上,采用增设一可相对其本体转动的手指,使所述手指通过第一弹簧弹性连接于所述本体上、使其移动块通过第二弹簧弹性连接于所述本体上,并使所述手指与所述移动块可分离地连接的方式,实现转动所述手指以推动所述移动块移动,使附着于所述移动块上的可食用部分(如糖果等)弹出于所述本体外的目的。具体的,在游戏过程中,转动所述手指以改变其抵触部相对于所述本体的位置,以推动所述移动块移动带动所述第二弹簧发生相对移动,使移动快能够在第二弹簧的作用下加速移动至空腔的开口端处,从而带动所述可食用部分伸出于所述本体外。相对于仅具有观赏功能的手掌玩具而言,本实用新型所提供的玩具机械手掌既增加了转动弹射所述可食用部分的功能、提高可玩性,又使儿童在游戏的过程中能够舔食所述可食用部分,为儿童带来别样的乐趣,以吸引儿童关注。
附图说明
14.图1为本实用新型一实施例的玩具机械手掌的立体结构示意图。
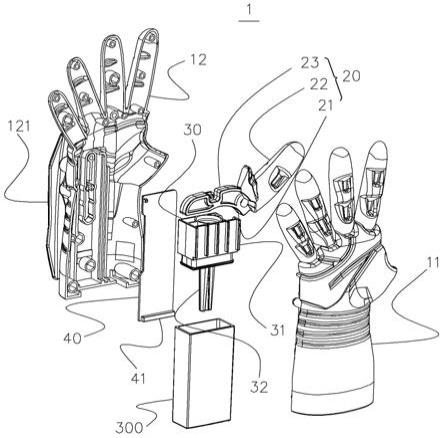
15.图2为图1中玩具机械手掌的立体分解结构示意图。
16.图3为图1中玩具机械手掌的可食用部分伸出于箱体外时的内部结构示意图。
17.图4为图1中玩具机械手掌的可食用部分回缩于箱体内时的内部结构示意图。
18.图中:1
‑
玩具机械手掌;10
‑
本体;100
‑
空腔;11
‑
第一壳体;111
‑
第一连接柱;112
‑
第二连接柱;12
‑
第二壳体;121
‑
装饰板;20
‑
手指;21
‑
枢接部;22
‑
控制部;23
‑
抵触部;30
‑
移动块;300
‑
可食用部分;31
‑
抵接块;32
‑
固定杆;33
‑
固定部;34
‑
限制部;40
‑
限位板;41
‑
限位块;51
‑
第一弹簧;52
‑
第二弹簧;521
‑
簧体;522
‑
第一力臂;523
‑
第二力臂。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。可以理解,附图仅提供参考与说明用,并非用来对本实用新型加以限制。附图中显示的连接仅仅是为便于清晰描述,而并不限定连接方式。
20.需要理解的是,“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等术语是基于附图描述本实用新型所示方向或位置关系,仅是为了方便描述本实用新型和简化描述,而不是指示所指的装置或元件必须具有特殊的方向或位置关系,因此不能理解为对本实用新型的限制。需要理解的是,“第一”、“第二”等术语仅是为了便于描述本实用新型的技
术方案,而不是指示所指的装置或元件必须具有特殊的顺序,因此不能理解为对本实用新型的限制。需要说明的是,当一个件被认为是“连接”另一个件,它可以是直接连接到另一个件或者可能同时存在居中件。除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。
21.请同时参照图1至图4,本实施例提供一种玩具机械手掌1,包括本体10、可转动地连接于本体10上的手指20、与手指20可分离地连接的移动块30、及固定于本体10上的限位板40。本实用新型的其他实施方式中,玩具机械手掌1不局限于本实施例中的设置有限位板40,玩具机械手掌1也可不设有限位板40。
22.其中,本体10包括固定连接的第一壳体11和第二壳体12,本实施例中,第一壳体11和第二壳体12通过在两者的相对面上分别设置有可凹凸配合连接的凸柱和凹槽的方式,实现两者的固定连接。且第一壳体11和第二壳体12之间设置有一空腔100,空腔100与外部连通,其内可移动地连接有移动块30。本实用新型的其他实施方式中,第一壳体11和第二壳体12不局限于本实施例中的通过凹凸配合连接的方式进行连接,第一壳体11和第二壳体12也可通过螺纹件、卡扣件、磁吸或胶连接等方式实现两者的固定连接。
23.第一壳体11邻近空腔100的一侧凸伸有一第一连接柱111,第一连接柱111上连接有一第二弹簧52,用于通过第二弹簧52弹性连接本体10和移动块30。本实施例中,第一壳体11内相对于部分手指20的位置还凸伸有一第二连接柱112,第二连接柱112上连接有一第一弹簧51,用于通过第一弹簧51弹性连接本体10和手指20。第二壳体12上可拆卸地连接有一装饰板121,起到装饰作用,从而提高玩具机械手掌1整体的趣味性和观赏性,吸引儿童注意。本实用新型的其他实施方式中,第一壳体11不局限于本实施例中的设置有第二连接柱112,第一壳体11上也可不设有第二连接柱112。
24.可以理解的是,本实用新型的其他实施方式中,本体10还可包括一封盖,所述封盖对应连接于空腔100的开口端处,且所述封盖的一端铰接于第一壳体11和第二壳体12的连接处,所述封盖的另一端可分离地与第一壳体11和第二壳体12连接。所述封盖的设置能够在玩具机械手掌1闲置时封闭空腔100,防止灰尘等污染物进入空腔100内,减少空腔100内物品受到污染的概率。
25.需要说明的是,本实施例中,第一弹簧51被设定为拉伸弹簧,第二弹簧52被设定为异形扭转弹簧。其中第一弹簧51连接于第二连接柱112和手指20之间,用于在手指20受控相对本体10转动时随之拉伸蓄能,并在手指20未受力时回缩带动手指20复位。第二弹簧52包括簧体521、及沿簧体521向外延伸的第一力臂522和第二力臂523,其中第一力臂522呈直杆状设置并固定于第一连接柱111上,第二力臂523呈m字形设置并固定于移动块30上。第二弹簧52用于在移动块30受控于空腔100内移动的过程中,使第一力臂522和第二力臂523随之与簧体521间发生相对移动,从而实现将移动块30静态固定于空腔100的开口端处(如图3所示)、或将移动块30静态固定于空腔100的闭口端处(如图4所示)的目的。具体的,在移动块30受控朝空腔100的开口端处移动的过程中,移动块30移动带动第一力臂522、第二力臂523和簧体521间发生相对移动,由于第二力臂523具有m字形结构,故在其相对移动的过程中,其弹性势能转化为动能,以在移动块30不受力时,驱动带动移动块30持续朝空腔100的开口端方向移动,从而将移动块30推动至空腔100的开口端处。
26.本实用新型的其他实施方式中,第一弹簧51不局限于本实施例中的被设置为拉伸弹簧,第一弹簧51也可被设置为扭簧,此时所述扭簧可与另一部分手指20连接,从而实现手指20在受控相对本体10转动后,若不持续受力即可复位的功能。
27.本实施例中,手指20用于受控相对本体10转动以推动移动块30移动,其包括可转动地连接于本体10上的枢接部21、及分别连接于枢接部21相对的两侧上的控制部22和抵触部23,其中枢接部21、控制部22和抵触部23为一体成型结构。可以理解的是,控制部22大致呈拇指形状设置,且其朝向本体10外延伸,以用于供玩家控制转动以随之带动抵触部23移动。抵触部23位于本体10内并通过第一弹簧51与第二连接柱112弹性连接,且抵触部23与移动块30可抵触地连接。当控制部22受控相对本体10转动时,抵触部23随之转动并推动与之抵接的移动块30朝向空腔100的开口端处移动。反之,若推动移动块30朝向空腔100的闭口端的方向移动,则在移动块30受力移动的过程中,第一力臂522、第二力臂523和簧体521间随之发生相对移动,并在第二力臂523的作用下将带动移动块30复位至与抵触部23抵接的位置。
28.本实用新型的其他实施方式中,抵触部23上也可不连接有第一弹簧51,此时第一壳体11上不设置有第二连接柱112,且第一弹簧51被设置为扭簧,所述扭簧与枢接部21连接。
29.本实施例中,移动块30包括抵接块31、沿抵接块31的其中一端向外延伸的固定杆32、及位于抵接块31上的固定部33和限制部34。其中,固定杆32朝向空腔100的开口端处延伸且其上附着有可食用部分300(如糖果等),当移动块30受控于空腔100内移动时,附着于固定杆32上的可食用部分300随之可移动至空腔100外或回缩至空腔100内(如图3和图4所示),用于增加玩具机械手掌1的可食用的功能以吸引儿童注意,能够使儿童在进行游戏的间隙舔舐糖果,为儿童带来别样的乐趣。固定部33和限制部34位于抵接块31上朝向限位板40的一侧,且固定部33上固定有第二力臂523;限制部34位于抵接块31上邻近可食用部分300的边沿位置,且限制部34可抵触地与部分限位板40连接。可以理解的是,固定部33设置于抵接块31远离第一连接柱111的另一侧上(即固定部33和第一连接柱111分别邻近设置于空腔100相对的两侧上)。本实用新型的其他实施方式中,移动块30不局限于本实施例中的设置有限制部34,移动块30上也可不设有限制部34。
30.需要说明的是,移动块30和第二弹簧52间的连接结构设置,能够在可食用部分300被食用完之后,将固定杆32固定凸伸于空腔100外,充当棍体模具以制作冰棍等食物,实现二次利用,从而提高玩具机械手掌的实用性。
31.限位板40对应于空腔100固定于第二壳体12内,且限位板40上凸伸有限位块41,限位块41相对于抵接块31的一侧设置并与限制部34可抵触地连接。需要说明的是,限位块41大致呈条形柱状设置,用于在移动块30受控朝向空腔100的开口端处移动的过程中,与限制部34抵触连接以限制移动块30的移动距离。
32.需要说明的是,玩具机械手掌的工作流程大致为:当控制部22受控相对本体10发生转动时,抵触部23随之转动,以推动与其抵接的移动块30朝向空腔100的开口端处移动,至抵触部23与移动块30分离,此时移动块30随之在第二弹簧52的作用下加速移动至空腔100的开口端处,以带动可食用部分300弹出本体10外。此时控制部22若不受力,则抵触部23将在第一弹簧51的带动下复位,以连动带动控制部22复位。若需将可食用部分300收容于空
腔100内,则推动可食用部分300,以带动移动块30朝向空腔100的闭口端方向移动即可,在此过程中,第二弹簧52随之发生相对移动、并带动移动块30复位至其与抵触部23抵触连接的位置,此时可食用部分300收容于空腔100内。
33.综上,相对于仅具有观赏功能的手掌玩具而言,本实用新型所提供的玩具机械手掌既增加了转动弹射出可食用部分的功能、提高可玩性,又使儿童在游戏的过程中能够舔食所述可食用部分,为儿童带来别样的乐趣,以吸引儿童关注。
34.本技术的说明书和权利要求中,词语“包括/包含”和词语“具有/包括”及其变形,用于指定所陈述的特征、数值步骤或部件的存在,但不排除存在或添加一个或多个其它特征、数值、步骤、件或它们的组合。
35.为清楚起见,本实用新型在单独实施例中所描述的某些特征,可以组合在单个实施例中使用。而且,在单个实施例中描述的本实用新型的各种特征,也可以在单独地或以任何合适形式在子组合中使用。
36.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1