跳舞玩具及其机芯和跳舞驱动装置的制作方法
1.本实用新型涉及跳舞玩具,特别涉及一种跳舞玩具及其机芯和跳舞驱动装置。
背景技术:
2.玩具是小孩的重要娱乐工具,它能给小孩带来很多快乐,并且能够在一定程度上开发小孩的智力。现在玩具分为静态玩具和动态玩具,静态玩具以外形、色彩等吸引小孩,但因其缺乏动感,已经很难引起小孩的兴趣,故动态玩具已经越来越受到小孩的喜欢。
3.电动玩具是一种用微型电动机驱动的机动玩具,其中电动玩具由于形象逼真深受孩子们的喜爱。大多电动玩具是以电池作为能源动力,在玩具的内部安装小型马达和传动装置,使玩偶进行摇摆、扭头等动作。
4.现有电动玩具为了实现多个动作,特别是不同方向的相同动作时,例如向左走和向右走,需要控制电机进行正反转,而电机的正反转需要ic芯片进行控制,这势必会增加玩具的制作成本。
技术实现要素:
5.本实用新型的第一目的在于克服现有技术的缺点与不足,提供一种跳舞驱动装置,该跳舞驱动装置在不需要使用ic芯片控制的情况下,即可实现不同方向的动作控制,大幅度降低玩具的制造成本。
6.本实用新型的第二目的在于提供一种机芯。
7.本实用新型的第三目的在于提供一种跳舞玩具。
8.本实用新型的第一目的通过下述技术方案实现:一种跳舞驱动装置,包括电机、升降牙、第一传动机构、第二传动机构和第三传动机构;
9.所述电机通过第一传动机构输出动力至升降牙,控制升降牙的升降位置,至少包括第一位置和第二位置;升降牙升降运动到第一位置时,与第二传动机构相配合;升降牙升降运动到第二位置时,通过第三传动机构与第二传动机构相配合。
10.优选的,控制升降牙的升降位置还包括第三位置,升降牙升降运动到第三位置时与第四传动机构相配合。
11.优选的,所述升降牙包括套设在同一轴上的第一齿轮和第二齿轮;所述第一齿轮和第二齿轮位置相邻且两者为可相对转动关系;
12.在第一齿轮或第二齿轮一侧设置第三齿轮,对应在第一齿轮或第二齿轮的带动下进行升降运动以及转动;
13.所述第一齿轮上,与第二齿轮相对的面上设置有凸起部件;所述第二齿轮上,与第一齿轮相对的面上设置有容纳凸起部件的各种深度的槽位;
14.所述电机通过第一传动机构输出动力至升降牙的第一齿轮和第二齿轮,升降牙通过第三齿轮与第二传动机构、第三传动机构相配合。
15.更进一步的,所述凸起部件为立体三角形形状,所述凸起部件环绕着第一齿轮中
心进行设置;
16.所述第二齿轮上,各槽位为环绕着第二齿轮中心进行设置的弧形槽位,随着第一齿轮相对第二齿轮朝一个方向转动,第一齿轮上的凸起部件依次进入到各槽位中;
17.第二齿轮上,各个槽位为依次连通关系,相邻的两种深度的槽位之间,通过斜坡进行过渡;或者,第二齿轮上,各个槽位分别独立的分布在第二齿轮上;或者,第二齿轮上,其中一个或多个槽位独立的分布在第二齿轮上,其中多个槽位为连通关系,相邻的两种深度的槽位之间,通过斜坡进行过渡;
18.各槽位的其中一侧边或两侧边设置为向外倾斜的斜面。
19.更进一步的,所述凸起部件为立体的直角三角形形状,第二齿轮中,槽位位于凸起部件从槽位外部进入的一侧边设置为垂直面,位于凸起部件离开槽位到外部的一侧边设置为向外倾斜的斜面。
20.更进一步的,所述第三齿轮套设在第一齿轮或第二齿轮的套筒上,在第一齿轮或第二齿轮的带动下进行升降运动以及转动;所述第三齿轮套设在第一齿轮或第二齿轮后,第三齿轮与所套设轴的端部之间、第一齿轮与所套设轴端部之间或第二齿轮与所套设轴端部之间设置有弹性部件;
21.所述第三齿轮包括一个齿轮或多个同轴心设置的齿轮;当有多个齿轮时,升降牙升降到对应位置时,由第三齿轮中对应的齿轮啮合到对应位置处的传动机构;
22.其中,第一齿轮和第二齿轮的齿数为非相同数量。
23.更进一步的,所述第一传动机构包括第四齿轮、第五齿轮和第六齿轮;
24.第四齿轮包括套设在同一轴上的第四上齿轮和第四下齿轮,所述第四上齿轮和第四下齿轮为同步转动关系;
25.第五齿轮包括套设在同一轴上的第五上齿轮和第五下齿轮,所述第五上齿轮和第五下齿轮为同步转动关系;
26.第六齿轮包括套设在同一轴上的第六上齿轮和第六下齿轮,所述第六上齿轮和第六下齿轮为同步转动关系;
27.所述第四上齿轮为皇冠齿轮,与电机转动轴上的齿轮垂直啮合;所述第四下齿轮与第五上齿轮啮合;所述第五下齿轮和第六下齿轮啮合;第六上齿轮与升降牙中第一齿轮和第二齿轮啮合,在第六上齿轮的带动下,第一齿轮和第二齿轮相对转动。
28.更进一步的,所述第二传动机构包括第七齿轮、第八齿轮、第九齿轮、第十齿轮、第一偏心轮和第二偏心轮;
29.所述第九齿轮和第一偏心轮套设在同一轴中并进行同步转动;所述第十齿轮和第二偏心轮套设在同一轴中并进行同步转动;
30.所述升降牙升降到第一位置时,升降牙的第三齿轮与第七齿轮和第八齿轮啮合,为第二传动机构提供一个方向动力;
31.所述第九齿轮和第七齿轮啮合,第十齿轮和第八齿轮啮合。
32.更进一步的,所述第三传动机构包括第十一齿轮,所述第十一齿轮包括套设在同一轴上的第十一上齿轮和第十一下齿轮,第十一上齿轮和第十一下齿轮为同步转动关系;
33.所述升降牙升降到第二位置时,升降牙的第三齿轮与第十一上齿轮啮合,第十一下齿轮分别与第七齿轮和第八齿轮啮合,升降牙通过第三传导机构中的第十一齿轮为第二
传动机构提供另一个方向动力。
34.更进一步的,电机通过第一传动机构输出动力至升降牙,控制升降牙的升降位置还包括第三位置;
35.跳舞驱动装置还包括第四传动机构,第四传动机构包括第十二齿轮和第三偏心轮;第十二齿轮和第三偏心轮套设在同一轴中并进行同步转动;
36.升降牙升降到第三位置时,升降牙的第三齿轮与第十二齿轮啮合,为第四传动机构提供动力。
37.本实用新型的第二目的通过下述技术方案实现:一种跳舞玩具的机芯,包括内壳体和设置在内壳体上的本实用新型第一目的所述的跳舞驱动装置。
38.本实用新型的第三目的通过下述技术方案实现:一种跳舞玩具,其特征在于,包括第一运动机构以及权利要求11中所述的机芯;
39.其中,第二传动机构与第一运动机构相配合;
40.升降牙升降到第一位置时,在第二传动机构的传动下为第一运动机构提供动力,控制第一运动机构往一个方向运动;
41.升降牙升降到第二位置时,依次通过第三传动机构和第二传动机构的传动下为第一运动机构提供动力,控制第一运动机构往另一个方向运动。
42.优选的,还包括第二运动机构,第二运动机构与第四传动机构配合,通过第四传导机构提供动力;
43.所述第一运动机构为控制跳舞玩具进行左右走动的部件,包括设置在内壳体两侧的第一传动杆和第二传动杆,第一传动杆和第二传动杆的上端分别对应活动的套设在内壳体两侧位置的导柱上;第一传动杆和第二传动杆中间部位分别对应套设在第一偏心轮和第二偏心轮的偏心轴上,其中第一偏心轮和第二偏向轮分别设置在内壳体两侧;
44.第二运动机构包括为套设在内壳体外部的外壳体,外壳体内侧对应在第四传导机构第三偏心轮的位置处设置有供第三偏心轮上偏心轴插入的槽。
45.本实用新型相对于现有技术具有如下的优点及效果:
46.(1)本实用新型跳舞驱动装置,包括电机、升降牙、第一传动机构、第二传动机构和第三传动机构;电机通过第一传动机构输出动力至升降牙,控制升降牙的升降位置,至少包括第一位置和第二位置;升降牙升降运动到第一位置时与第二传动机构相配合,能够控制第二传动机构提供一个方向动力;升降牙升降运动到第二位置时通过第三传动机构与第二传动机构相配合,能够控制第二传动机构提供另一个相反方向的动力。本实用新型基于跳舞驱动装置的上述结构,在不需要使用ic芯片控制的情况下,就能够实现运动机构不同方向的动作控制。
47.(2)本实用新型跳舞驱动装置中,控制升降牙的升降位置还可包括第三位置等其他升降位置,升降牙升降运动到第三位置或其他升降位置时,可与第四传动机构或其他传动机构相配合,基于此,本实用新型跳舞驱动装置还可控制跳舞玩具进行多种不同的跳舞动作。
48.(3)本实用新型跳舞驱动装置中,升降牙包括套设在同一轴上的第一齿轮和第二齿轮;第一齿轮和第二齿轮位置相邻并且两者为可相对转动关系;在第一齿轮或第二齿轮一侧设置第三齿轮,对应在第一齿轮或第二齿轮的带动下进行升降运动以及转动;第一齿
轮与第二齿轮相对的面上设置有凸起部件,第二齿轮与第一齿轮相对的面上设置有容纳凸起部件的多个各种深度的槽位,随着第一齿轮和第二齿轮之间的相对运动,凸起部件进入到各槽位中或离开槽位,改变第一齿轮和第二齿轮之间的相对距离,从而改变第三齿轮的位置,通过第三齿轮能够驱动不同的传动机构的工作。因此基于本实用新型的升降牙结构,能够使得跳舞在使用较少齿轮的情况下即可实现多种跳舞动作,使得跳舞玩具的生产成本更低,体积可以更小型化。
49.(4)本实用新型跳舞驱动装置中,升降牙第一齿轮上的凸起部件可以是环绕着第一齿轮中心设置的立体三角形形状,第二齿轮上的槽位可以是环绕着第二齿轮中心进行设置的弧形槽位,基于此,在第一齿轮和第二齿轮相对转动时,第一齿轮上的凸起部件可以顺利的进出第二齿轮上的槽位以及在槽位中转动,降低第一齿轮上凸起部件和第二齿轮上扇环形孔的磨损程度。另外,第三齿轮套设在第一齿轮或第二齿轮的套筒上,在第一齿轮或第二齿轮的带动下进行升降运动以及转动;第三齿轮套设在第一齿轮或第二齿轮后,第三齿轮与所套设轴的端部之间设置有弹性部件。基于本实用新型的结构,第一齿轮和第二齿轮相对转动使凸起部件位于第二齿轮的最深槽位时,第一齿轮和第二齿轮相对的面接触,第一齿轮和第二齿轮相对转动使凸起部件位于第二齿轮的其他深度槽位或离开槽位时,第一齿轮和第二齿轮分离相应距离,其中当凸起部件接触的是第二齿轮非槽位位置时,第一齿轮和第二齿轮之间的距离为最大,弹性部件基于第三齿轮施加到第一齿轮或第二齿轮的作用力,可以使得第一齿轮和第二齿轮的相对位置更加稳定,防止两者在相对运动过程中出现位置漂移的现象,基于此,能够更加精准的控制第三齿轮的位置。
50.(5)本实用新型跳舞驱动装置中,第二传动机构可以是由齿轮和两个偏心轮构成的部件,第二传动机构在升降牙直接驱动的情况下,使得两个偏心轮向一个方向(例如顺时针)转动;第二传动机构在升降牙通过第三传动机构间接驱动的情况下,可以使得两个偏心轮向另一个方向(例如逆时针)转动;基于此,本实用新型装置在无需ic控制器芯片的情况下,第二传动机构即可实现两个方向的转动,即可以驱动利润跳舞玩具左右方向行走的运动,从而实现跳舞玩具左右行走的舞姿。
51.(6)本实用新型跳舞玩具,包括本实用新型性的跳舞玩具的机芯以及各种运动机构,能够实现跳舞玩具多种舞姿的控制。其中,第一运动机构可以是位于跳舞玩具两侧的左右脚部件,具体可以通过内壳体左右两侧安装的两根传动杆实现,两根传动杆上端活动安装在内壳体上后,通过其中间部位的通孔套在第一传动机构两个偏心轮的轴上,就可以跟随着偏心轮进行旋转,在传动杆下端安装上跳舞玩具的脚掌后,即可以模拟出跳舞左右走路的姿态。另外,第二运动机构可以是套设在内壳体外部并且可相对内壳体运动的外壳体,第二运动机构可以通过跳舞驱动装置第四传动机构提供动力,具体可以是第四传动机构第三偏心轮的偏心轴插入到外壳体内侧的槽中,基于此,第三偏心轮转动时,可以带动外壳体进行运动,实现玩具身体摆动等动作控制。
附图说明
52.图1a至1b分别是本实用新型跳舞驱动装置的主视图和后视图。
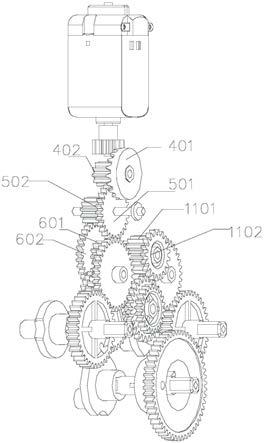
53.图2和3是本实用新型跳舞驱动装置的立体图。
54.图4是本实用新型跳舞驱动装置中升降牙的结构图。
55.图5a和5b是升降牙中第一齿轮的结构图。
56.图5c至5e是升降牙中第二齿轮的结构图。
57.图5f是升降牙中第三齿轮的结构图。
58.图6a是本实用新型跳舞玩具机型的结构图。
59.图6b和6c是本实用新型跳舞玩具机型的结构分解图。
60.图7是本实用新型跳舞玩具内部结构示意图(拆掉一半外壳后所展示的)。
具体实施方式
61.下面结合实施例及附图对本实用新型作进一步详细的描述,但本实用新型的实施方式不限于此。
62.实施例1
63.基于现有技术中跳舞玩具不同方向的相同动作,需要使用ic芯片(控制器,例如单片机等)控制电机进行正反转,导致跳舞玩具制造成本高的问题了,本实施例公开了一种跳舞驱动装置,该跳舞驱动装置在不需要使用ic芯片控制的情况下,即可实现不同方向的动作控制,大幅度降低玩具的制造成本。
64.如图1a至1b、图2和图3所示,本实施例跳舞驱动装置包括电机16、升降牙17、第一传动机构、第二传动机构、第三传动机构和第四传动机构。所述电机通过第一传动机构输出动力至升降牙,控制升降牙的升降位置,包括第一位置、第二位置和第三位置等;升降牙升降运动到第一位置时,与第二传动机构相配合,用于控制第二传动机构往一个方向运动;升降牙升降运动到第二位置时,通过第三传动机构与第二传动机构相配合,控制第二传动机构往另一个相反方向运动,升降牙升降运动到第上位置时,与第四传动机构相配合,用于控制第四传动机构的传动工作。
65.在本实施例中,如图4、5a至5b中所示,升降牙包括套设在同一轴上的第一齿轮1和第二齿轮2;第一齿轮1和第二齿2轮位置相邻并且两者为可相对转动关系。在本实施例中,第一齿轮和第二齿轮为外径和模数均相同但是齿轮数不同的两个齿轮,第一齿轮的齿数量比第二齿轮的齿数数量多,例如可以设置第一齿轮的齿数量为40个,所述第二齿轮的齿数量为39个,或者第二齿轮的齿数量比第一齿轮的齿数量多。本实施例中,套设在同一轴上的第一齿轮和第二齿轮与第一传动机构的同一个齿轮啮合,在第一传动机构该齿轮的带动下,第一齿轮和第二齿轮都进行转动,并且由于第一齿轮和第二齿轮的齿数不同,第一齿轮和第二齿轮将进行相对的转动。本实施例中,电机通过第一传动机构输出动力至升降牙的第一齿轮和第二齿轮。
66.本实施例中,5a和5b所示,第一齿轮1的表面上设置有凸起部件101,该表面为与第二齿轮2相对的面;凸起部件101可以设置为立体三角形形状,本实施例中,凸起部件101环绕着第一齿轮1中心进行设置。
67.本实施例中,如图5c至5e所示,第二齿轮2的表面上设置有容纳凸起部件的多个各种深度的槽位201,该表面为与第一齿轮1相对的面。本实施例中,同一深度的槽位201可以是一个或多个,第二齿轮上包括至少两种深度的槽位,如图4和5c中所示,本实施例的第二齿轮上包括两个槽位,两个槽位的深度不同,分别为第一槽位2011和第二槽位2012,第一槽位2011的深度比第二槽位的深度更深。其中,槽位的底部可以是突出到第二齿轮另一面(未
与第一齿轮相对的面)的外部。在本实施例中,各槽位可以为环绕着第二齿轮中心进行设置的弧形槽位,随着第一齿轮相对第二齿轮朝一个方向转动,第一齿轮上的凸起部件可以依次进入到各槽位中;随着第一齿轮1和第二齿轮2之间的相对运动,凸起部件101进入到各槽位中或离开槽位,改变第一齿轮和第二齿轮之间的相对距离。在本实施例中,可以根据第二齿轮相对第一齿轮所要保持的几种距离来确定第二齿轮上各种深度槽位的数量,另外各个槽位的深度决定着第二齿轮和第一齿轮能够保持的距离具体是多少,当第一齿轮1的凸起部件位于第二齿轮2的最深的一个槽位时,第一齿轮和第二齿轮的之间的距离最小,本实施例中,最深的槽位足够第一齿轮凸起部件101全部没入其中,因此当凸起部件位于最深槽位时,第一齿轮和第二齿轮相对的面可以接触,第一齿轮和第二齿轮相对转动使凸起部件位于第二齿轮的其他深度槽位或离开槽位时,第一齿轮和第二齿轮分离相应距离,当凸起部件离开槽位,即接触的是第二齿轮非槽位位置时,第一齿轮和第二齿轮之间的距离为最大。本实施例中,第二齿轮上,可以设置各个槽位为依次连通关系,相邻的两种深度的槽位之间,通过斜坡进行过渡,如图5c所示,本实施例中第二齿轮上包括2个深度不同的槽位,两个槽位为连通的关系,第一齿轮1上凸起部件101可以直接从其中一个槽位到达另一个相邻的槽位;或者,第二齿轮上,可以设置各个槽位分别独立的分布在第二齿轮上;或者,第二齿轮上,可以设置其中一个或多个槽位独立的分布在第二齿轮上,其中多个槽位为连通关系,相邻的两种深度的槽位之间,通过斜坡进行过渡,具体可以根据所要控制第一齿轮和第二齿轮之间各个时间段的相对距离进行设置。
68.本实施例中,第二齿轮上,各槽位的其中一侧边或两侧边可以设置为向外倾斜的斜面,方便于凸起部件进入和/或离开槽位。在本实施例中,为使得第一齿轮和第二齿轮之间只能相对一个方向转动,针对第一齿轮的凸起部件和第二齿轮的槽位可以设置为满足如下条件:凸起部件101可以为立体的直角三角形形状,第二齿轮中,槽位位于凸起部件从槽位外部进入的一侧边(对应如图4中第一槽位2011的左侧边)设置为垂直面,位于凸起部件离开槽位到外部的一侧边(对应如图4中第二槽位2012的右侧边)设置为向外倾斜的斜面,其中凸起部件进入到槽位后,凸起部件的直角边为靠近槽位垂直面的一边,如图4中所示,凸起部件只能从第一槽位2011左侧边进入第一槽位,通过第一槽位后经过第一槽位和第二槽位的过渡边到达第二槽位,最后从第二槽位2012的右侧边进入,由于凸起部件的直角边以及第一槽位的垂直面,凸起部件不能从第一槽位的左侧边离开第一槽位,因此这种设置使得第一齿轮和第二齿轮只能相对一个方向旋转,适合在一些特定的场合使用。
69.本实施例中,在第一齿轮1或第二齿轮2一侧设置第三齿轮3,第三齿轮3对应在第一齿轮1或第二齿轮2的带动下进行升降运动以及转动;在本实施例中,可以第三齿轮包括一个齿轮或包括多个同轴心设置的齿轮。如图4及图5f所示,本实施例中第三齿轮包括同轴心一体设置的3个齿轮,其中中间齿轮的直径大于两侧齿轮。本实施例中,第三齿轮可以套设在第一齿轮或第二齿轮的套筒202上,或也者通过卡接的方式与第一齿轮或第二齿轮固定连接在一起,在第一齿轮或第二齿轮的带动下进行升降运动以及同步转动。如图4至5f中所示,第三齿轮套设在第二齿轮上,可以跟随第二齿轮进行升降运动以及转动,第三齿轮基于第二齿轮与第一齿轮的相对距离,可以升降到不同的位置,对应第一位置、第二位置和第三位置,以实现为不同位置传动机构提供传动力。具体,本实施例中第二齿轮上可以设置有两个槽位,第三齿轮3包括三个齿轮时,从靠近第二齿轮到远离第二齿轮,分别定义为a齿轮
301、b齿轮302和c齿轮303,可以设置当凸起部件位于第一槽位2011时,升降牙升降到第一位置,a齿轮与第二传动机构相配合,驱动第二传动机构运动,当凸起部件位于第二槽位2012时,升降牙升降到第二位置,b齿轮与第三传动机构相配合,通过第三传动机构的传动间接控制第二传动机构的传动工作,当凸起部件离开第二槽位2012,与第二齿轮的面接触时,升降牙升降到第三位置,c齿轮与第四传动机构相配合,驱动第四传动机构的传动工作,基于此,通过第三齿轮中的a齿轮、b齿轮和c齿轮可以实现第一传动机构至第四传动机构的传动控制。第三齿轮的个数也可以设置为1个,凸起部件在不同的位置时,使得第三齿轮的一个齿轮位于不同位置,从而控制不同位置的第二传动机构、第三传动机构和第四传动机构进行工作。具体可以根据实际需求灵活设置第三齿轮中齿轮的个数。
70.如图4中所示,第三齿轮套设在第一齿轮或第二齿轮后,第三齿轮与所套设轴的端部之间、第一齿轮与所套设轴端部之间或第二齿轮与所套设轴端部之间设置有弹性部件18,轴的一端设置有凸起,基于轴一端的凸起,可以将弹性部件锁定在第一齿轮或第二齿轮与轴端部之间,弹性部件具体可以使用弹簧。在本实施例中,第一齿轮和第二齿轮相对转动使凸起部件位于第二齿轮的最深槽位时,第一齿轮和第二齿轮相对的面接触,第一齿轮和第二齿轮相对转动使凸起部件位于第二齿轮的其他深度槽位或离开槽位时,第一齿轮和第二齿轮分离相应距离,其中当凸起部件接触的是第二齿轮非槽位位置时,第一齿轮和第二齿轮之间的距离为最大,弹性部件基于第三齿轮施加到第一齿轮或第二齿轮的作用力,可以使得第一齿轮和第二齿轮的相对位置更加稳定,防止两者在相对运动过程中出现位置漂移的现象,例如当凸起部件接触的是第二齿轮非槽位位置时,通过弹性部件的弹性作用,可以使得第一齿轮和第二齿轮的距离保持在凸起部件的长度。凸起部件进入到最深槽位时(此时凸起部件可以完全没入槽位时),弹性部件使得第一齿轮和第二齿轮快速恢复到两面接触的状态,基于此,本实施例能够更加精准的控制第三齿轮的位置。
71.在本实施例中,第一齿轮可以固定的套设在轴上,此时第三齿轮设置在第二齿轮一侧,跟随第二齿轮可以相对所套设的轴进行转动。或者也可以是:第二齿轮可以固定的套设在轴上,此时第三齿轮设置在第一齿轮一侧,跟随第一齿轮可以相对所套设的轴进行转动。以上两种情况下,如图4中所示,弹性部件18位于第三齿轮和轴端部之间。或者还可以是其他的设置安装方式,只要满足第一齿轮和第二齿轮可以相对转动即可,例如可以是:第一齿轮活动的套设在轴上,第二齿轮和第三齿轮两者固定的套设在轴上(此时第三齿轮位于第二齿轮一侧,跟随第二齿轮升降及转动),这种情况下,弹性部件18位于第一齿轮和轴端部之间;第二齿轮活动的套设在轴上,第一齿轮和第三齿轮两者固定的套设在轴上(此时第三齿轮位于第一齿轮一侧,跟随第一齿轮升降及转动),弹性部件18位于第二齿轮和轴端部之间。
72.本实施例中,如图1a至1b、图2和图3所示,第一传动机构包括第四齿轮4、第五齿轮5和第六齿轮6。其中:
73.第四齿轮4包括套设在同一轴上的第四上齿轮401和第四下齿轮402,第四上齿轮和第四下齿轮为同步转动关系;在本实施例中,第四上齿轮和第四下齿轮通过卡接方式固定在一起,并且活动的套设在轴上,第四上齿轮的直径大于第四下齿轮的直径。
74.第五齿轮5包括套设在同一轴上的第五上齿轮501和第五下齿轮502,第五上齿轮和第五下齿轮为同步转动关系;在本实施例中,第五上齿轮和第五下齿轮可以通过卡接方
式固定在一起,并且固定的套设在轴上,第五上齿轮的直径大于第五下齿轮的直径。在本实施例中,第五齿轮在第一传动机构中起到保护作用。
75.第六齿轮6包括套设在同一轴上的第六上齿轮601和第六下齿轮602,所述第六上齿轮和第六下齿轮为同步转动关系;在本实施例中,第六上齿轮和第六下齿轮通过卡接方式固定在一起,并且活动的套设在轴上,第六上齿轮的直径小于第六下齿轮的直径。
76.第四上齿轮为皇冠齿轮,与电机转动轴上的齿轮垂直啮合;第四下齿轮与第五上齿轮啮合;第五下齿轮和第六下齿轮啮合;第六上齿轮与升降牙中第一齿轮和第二齿轮啮合,在第六上齿轮的带动下,第一齿轮和第二齿轮相对转动。
77.本实施例中,如图1a至1b、图2和图3所示,第二传动机构包括第七齿轮7、第八齿轮8、第九齿轮9、第十齿轮10、第一偏心轮21和第二偏心轮22;其中:
78.第九齿轮9和第一偏心轮21套设在同一轴中并进行同步转动;第十齿轮10和第二偏心轮22套设在同一轴中并进行同步转动。在本实施例中,第九齿轮9和第一偏心轮套21均固定套设在轴上,即不能相对其套设的轴进行活动。第十齿轮10和第二偏心轮套22均固定套设在轴上,即不能相对其套设的轴进行活动。
79.升降牙3升降到第一位置时,升降牙3的第三齿轮与第七齿轮和第八齿轮啮合,为第二传动机构的第七齿轮和第八齿轮提供一个方向动力,即使得第七齿轮和第八齿轮超一个方向转动(例如是顺时针)。具体的,在本实施例中,可以是第三齿轮的a齿轮与第七齿轮和第八齿轮啮合。第九齿轮和第七齿轮啮合,第十齿轮和第八齿轮啮合。
80.本实施例中,第二传动机构通过第一偏向轮21和第二偏向轮22连接跳舞玩具的第一运动机构,使得第一运动机构在第一偏向轮和第二偏向轮的带动下进行相应的运动。在本实施例中,第七齿轮7和第九齿轮9啮合后与第八齿轮8和第十齿轮10啮合后为轴对称的关系,方便与第一运动机构中对称设置的运动部件进行配合传动。
81.本实施例中,如图1a至1b、图2和图3所示,第三传动机构包括第十一齿轮11,第十一齿轮包括套设在同一轴上的第十一上齿轮1101和第十一下齿轮1102,第十一上齿轮1101和第十一下齿轮1102为同步转动关系;
82.升降牙升降到第二位置时,升降牙的第三齿轮3与第十一上齿轮1101啮合,第十一下齿轮1102分别与第七齿轮和第八齿轮啮合,升降牙通过第三传导机构中的第十一齿轮能够为第二传动机构的第七齿轮和第八齿轮提供另一个方向动力,即使得第七齿轮和第八齿轮朝另一个方向转动(例如是逆时针)。第十一上齿轮1101的直径可以设置为大于第十一下齿轮1102,在本实施例中,升降牙升降到第二位置时,第三齿轮3的b齿轮与第十一上齿轮1101啮合。在本实施例中,第十一齿轮可以直接套设在第六齿轮所套设的轴上。
83.本实施例中,如图1a至1b、图2和图3所示,第四传动机构包括第十二齿轮12和第三偏心轮13;第十二齿轮和第三偏心轮套设在同一轴中并进行同步转动;
84.升降牙升降到第三位置时,升降牙的第三齿轮与第十二齿轮啮合,为第四传动机构提供动力。在本实施例中,升降牙升降到第三位置时,第三齿轮3的c齿轮与第十二齿轮12啮合,因此能够带动第十二齿轮转动,进而带动第三偏心轮转动。
85.实施例2
86.本实施例公开了一种跳舞玩具的机芯,如图6a至6c所示,包括内壳体14和设置在内壳体中上实施例1所述的跳舞驱动装置。
87.在本实施例中,其中跳舞驱动装置的一些组成部件可以设置在内壳体14内部,例如第一传动机构、升降牙,第二传动机构中的第七齿轮、第八齿轮、第九齿轮、第十齿轮,第三运动机构中的第十一齿轮设置在内壳体内部。跳舞驱动装置的一些组成部件可以安装镶嵌在壳体或者安装在内壳体14外部,例如,第二传动机构中的第一偏心轮和第二偏向轮以及第三传动机构中的上偏心轮镶嵌在内壳体侧壁上。跳舞驱动装置在内壳体上的安装位置和方式,可以根据跳舞玩具外部运动部件进行灵活设置,以能够驱动到外部运动部件为条件进行安装,并不一定如图6a中所示的安装方式。
88.实施例3
89.本实施例公开了一种跳舞玩具,如图7中所示,包括第一运动机构、第二运动机构以及实施例2所述的机芯。
90.在本实施例中,第二传动机构与第一运动机构相配合;升降牙升降到第一位置时,在第二传动机构的传动下为第一运动机构提供动力,控制第一运动机构往一个方向运动。
91.本实施例中,第一运动机构为控制跳舞玩具进行左右走动的部件,包括设置在内壳体两侧的第一传动杆31和第二传动杆32,第一传动杆和第二传动杆的上端分别对应活动的套设在内壳体两侧位置的导柱上;第一传动杆和第二传动杆中间部位分别对应套设在第一偏心轮和第二偏心轮的偏心轴上,其中第一偏心轮和第二偏向轮分别设置在内壳体两侧;具体的:
92.第一传动杆的上端设置有第一滑槽31-1,第二传动杆的上端设置有第二滑槽32-1,在本实施例中第一滑槽31-1和第二滑槽32-1均为长条状滑槽;内壳体相对于第一传动杆第一滑槽的位置上设置有第一导柱31-2,第一传动杆的第一滑槽可活动的套设在内壳体的第一导柱上;内壳体相对于第二传动杆第二滑槽的位置上设置有第二导柱32-2,第二传动杆的第二滑槽可活动的套设在内壳体上的第二导柱上;在本实施例中,第一导柱和第二导柱均为圆柱形,第一滑槽和第二滑槽的长度均比第一导柱和第二导柱横截面的直径长,第一滑槽和第二滑槽套分别设在第一导柱和第二导柱后,可以分别相对第一导柱和第二导柱活动,在活动过程中,第一滑槽和第二滑槽始终分别套设在第一导柱和第二导柱上,通过第一导柱和第二导柱可以控制第一传动杆和第二传动杆活动的范围。
93.第一偏心轮21上布置有第一偏心轴,所述第二偏心轮22上布置有第二偏心轴,所述第一传动杆31上设置有与第一偏心轮21上第一偏心轴相适配的第一轴孔,通过第一轴孔套设在第一偏心轴上;第二传动杆32上设置有与第二偏心轮22上第二偏心轴相适配的第二轴孔,通过第二轴孔套设在第二偏心轴上;第一传动杆在第一偏心轮的带动下进行运动时,其上第一滑槽相对第一导柱行走相应行程;第二传动杆在第二偏心轮的带动下进行运动时,其上第二滑槽相对第二导柱行走相应行程。
94.在本实施例中,第一偏心轮和第二偏向轮分别设置在内壳体两侧,第一导柱31-2和第二导柱32-2分别位于内壳体的两侧;将第一运动机构的第一传动杆31和第二传动杆32下端分别安装脚掌33或脚蹼后,即可通过第一运动机构实现跳舞玩具的左右行走。具体为,电机通电,通过第一传动机构传动使得升降牙升降到第一位置时,升降牙的第三齿轮(可以是其中的a齿轮)与第二传动机构的第七齿轮和第八齿轮啮合,第七齿轮和第八齿轮随着第三齿轮的转动而朝一个方向(例如顺时针方向)进行转动,此时第一偏心轮和第二偏心轮也朝一个方向(例如顺时针方向)进行转动,带动第一传动杆31和第二传动杆32朝一个方向
(例如顺时针方向)转动,带动脚掌向一个方向(例如向左)移动。升降牙升降到第二位置时,升降牙的第三齿轮(可以是其中的b齿轮)与第三传动机构的第十一上齿轮啮合,由于第十一下齿轮和第二传动机构的第七齿轮和第八齿轮啮合,这种情况下,升降牙第三齿轮的转动(和在第一位置时转动方向一致)通过第三传动机构后,将控制第二传动齿轮的第七齿轮和第八齿轮随着第三齿轮的转动而朝另一个方向(例如逆时针方向)进行转动,此时第一偏心轮和第二偏心轮也朝另一个方向(例如逆时针方向)进行转动,带动第一传动杆31和第二传动杆32朝另一个方向(例如逆时针方向)转动,带动脚掌向一个方向(例如向右)移动,基于上述能够实现跳舞玩具脚掌向右或向左变换一定位移,模拟出走路的舞姿。
95.本实施例中,如图7中所示,第二运动机构包括套设在内壳体14外部的外壳体15,外壳体内侧对应在第四传导机构第三偏心轮的位置处设置有供第三偏心轮上偏心轴插入的槽,内壳体上第三偏心轮在转动的时候,可带动外壳体进行摆动的动作,模拟出摆动的跳舞舞姿,另外在内壳体前后外壁上还可设置有其他的凸起部位35,对应在外壳体内侧设置有容纳凸起部位的槽,这个槽的长度(跳舞玩具高度方向上)大小使得外壳体跟随第三偏心轮动作时,凸起部位可以在槽长度方向上自由活动,宽度可以为刚好放的下凸起部位,这些设置可以使得外壳体摆动更加稳定,避免从内壳体上脱落下来,具体设置可以根据实际跳舞玩具的外壳形状进行。
96.本实施例中,跳舞玩具的外壳还可有设置其他的能够和舞姿配合的部件,例如,当跳舞玩具为如图7中所述的动物例如鸭子形状时,也可以在外壳体两侧分别安装可活动的翅膀34,翅膀的安装位置可以是在外壳体摆动过程中能够触碰到机芯,并且外壳体摆动过程中,由于外壳体相对机芯的活动能够带动翅膀的活动。另外,还可以设置动物的眼睛、嘴巴部位等为活动,同样的通过外壳相对机芯的活动,基于机芯的触碰带动眼睛、嘴巴等的动作,使得玩具的趣味性更强。再者,可以在跳舞玩具上设置led灯、语音芯片等,在跳舞玩具通电进行跳舞时,同时led灯能够通电进行点亮以及语音芯片能够驱动扬声器播放音乐,带来了更大的趣味性。
97.本实施例中,也不限于第一运动机构和第二运动机构,基于本实施例的跳舞驱动装置,可以根据实际需要,针对跳舞玩具添加更多的运动机构。
98.上述实施例为本实用新型较佳的实施方式,但本实用新型的实施方式并不受上述实施例的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1