动物玩具的腿杆驱动机构的制作方法
1.本实用新型涉及的是一种动物玩具的腿杆驱动机构,该机构完成驱使玩具做下趴动作。
背景技术:
2.具有腿杆的动物玩具在机械装置的驱动下,腿杆能作出一些动作,如行走、跳动,还有下趴等。中国实用新型专利zl201120150879.x“机械动物玩具”介绍的动物玩具的腿杆驱动机构,具有前后两对腿杆,前腿杆安装在s型曲轴上,后腿杆安装在机架上的枢轴上,s型曲轴与后腿杆枢轴安装孔之上点之间连接有行走连杆。s型曲轴、行走连杆、后腿杆三者构成产生行走动作的曲柄摇杆机构。s型曲轴的中心曲轴与传动机构中的转停切换机构连接。该腿杆驱动机构还有产生下趴动作的曲柄摇杆机构,曲柄中心转轴与传动机构中的倒顺转切换机构连接。其中下趴连杆连接曲柄回转短轴的结构是一扣向曲柄的缺口,下趴连杆上有弹力自下趴连杆指向曲柄的压力弹簧。其中摇杆经支点轴铰接在机架上。有摇杆定位结构和下趴连杆限位结构,所说摇杆定位结构是定位弹簧,定位弹簧所提供的弹力作用线在摇杆向不同方向摆动时位于支点轴的不同一侧。所说下趴连杆限位结构是限位柱和弧形缺口的配合,限定下趴连杆动作时其上缺口不超出曲柄上回转短轴的回转直径两端。摇杆一端与下趴连杆连接,另一端经连杆与前腿杆s型曲轴安装孔之上位置连接。即该实用新型的腿杆驱动机构有两个路线,一是行走,一是下趴。在行走功能时,由定位结构固定产生下趴动作的曲柄摇杆机构状态,则s型曲轴转动时,前腿杆上端相对连杆前端摆动而前腿杆s型曲轴安装孔则做回转运动,使前腿作用迈动的姿态。在行走连杆牵动下,后腿杆依机架上的枢轴摆动。在下趴功能时,s型曲轴停止转动,使前腿杆s型曲轴安装孔相对固定,产生下趴动作的曲柄摇杆机构工作时,曲柄推动下趴连杆向前拉动摇杆,摇杆又将前腿杆上端向后拉,前腿杆向前向上摆,呈前趴动作。
3.在该实用新型中,下趴动作需要有曲柄、下趴连杆、摇杆及连杆诸多杆构件,结构略显复杂,另外受摇杆中心枢轴这个固定点的牵制,动作不顺畅且能耗较大。
技术实现要素:
4.针对上述不足,本实用新型就是要提供一种结构更加简单取消了摇杆的动物玩具的腿杆驱动机构。
5.本实用新型提供的动物玩具的腿杆驱动机构,有前后两对腿杆和机架,机架上安装包括电机及传动机构的机械结构;有以安装在s型曲轴上的前腿杆、经枢轴安装在机架上的后腿杆、行走连杆以及机架构成的行走机构:机架上安装有与传动机构连接的s型曲轴,前腿杆安装在s型曲轴的偏心短轴上,后腿杆安装在固定于机架的枢轴上,后腿杆安装到枢轴的孔之上有延伸段,所述s型曲轴的偏心短轴与后腿杆延伸段之间连接有行走连杆;有包括曲柄、下趴连杆、前腿杆以及机架的下趴机构:曲柄由转动轮及其端面上固定的偏心短柱组成,下趴连杆与曲柄连接;下趴连杆与偏心短柱垂直设置,下趴连杆上有缺口,所述缺口
的开口方向相对转动轮是自外而内的,所述下趴连杆与曲柄的连接是缺口和偏心短柱的相扣搭连接;有安装在下趴连杆和机架之间的压力弹簧,压力弹簧向下趴连杆提供使下趴连杆上缺口压向转动轮之内的弹力;前腿杆在安装到s型曲轴的偏心短轴的孔之上有延伸段;还有连杆,所述前腿杆延伸段与下趴连杆之间由所述连杆连接,即前腿杆延伸段依次经连杆、下趴连杆与曲柄连接;还有摇杆,摇杆的摆动中心轴在机架上,摇杆的自由端连接在下趴连杆与连杆的连接位置上。
6.本实用新型提供的动物玩具的腿杆驱动机构,其中所称机架不局限于安装机械结构的狭义的机架,还延伸为所有与该狭义的机架作固定连接的固定构件。
7.本实用新型提供的动物玩具的腿杆驱动机构,直接以曲柄经下趴连杆和连杆连接前腿杆驱动其作前趴动作,并增加一条摇杆使连杆和下趴连杆的后端相对机架的活动范围受到限制,以对下趴连杆牵引连杆提供运动方位的约束。与现有技术中采用以支点轴安装在机架上的摇杆传递下趴连杆对连杆的驱动并以定位弹簧来约束摇杆运动方向的结构相比,本实用新型的结构要简约得多,而且连杆与下趴连杆之间关节点是以一摇杆束缚是相对自由的,其运动比较活络,使其传递动力更加圆滑。因此本实用新型因结构简单使成本下降,还因动作阻力下降而得降低能耗。
8.所述压力弹簧是螺旋圆柱弹簧,当下趴连杆后移到顶点时所述圆柱弹簧两端连线在摇杆摆动中心轴之后,当下趴连杆前移到顶点时所述圆柱弹簧两端连线在摇杆摆动中心轴之前。使下趴连杆在曲柄的驱动下无论是向后或者向前移动到顶点时都有稳定的状态。即压力弹簧在本实用新型中的作用除了向下趴连杆提供缺口扣向偏心短柱的力外,还向下趴机构提供一个维稳的力。
9.所述摇杆的自由端连接在下趴连杆后端和连杆后端集合在一起的范围,包括但并不仅仅是以一条枢轴将两者杆与连杆的连接位置上中所述的下趴连杆与连杆连接位置,是指将下趴连铰接在一起的点,即:摇杆可以与下趴连杆、连杆以同一枢轴连接,或者下趴连杆、连杆分别连接在摇杆的不同点,或者连杆与摇杆连接而下趴连杆与连杆以另外的点连接,或者下趴连杆和摇杆连接而连杆与下趴连杆以另外的点连接。
10.所述动物玩具的腿杆驱动机构在玩具左右各设置一套同步动作的下趴机构。所述连杆和摇杆左右各一副,左右两条摇杆安装到机架上的枢轴连接为一条使摇杆呈u型,所述下趴连杆及曲柄设置在玩具的左侧或右侧。一侧的下趴连杆的移动通过u型的摇杆使两侧连杆同步跟随移动,使两侧前腿杆作出同步的下趴动作。
11.所述下趴机构与机架之间有限位结构,包括机架上设置有限位柱,当下趴连杆向后移动到预定位置时限位柱抵在下趴机构中的零件上,或者抵在与下趴机构连动的零件上。
附图说明
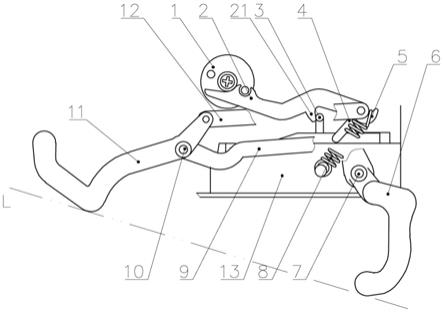
12.图1为本实用新型一实施例玩具直立状态时的结构示意图,图2为该实施例前趴状态时的结构示意图,图中:1-曲柄,2-下趴连杆一,3-限位柱,4-摇杆,5-拉钩,6-后腿杆,7-枢轴,8-压力弹簧,9-行走连杆,10-s型曲轴,11-前腿杆,12-连杆,13-机架,21-钩扣,l-地平线;
13.图3为本实用新型另一实施例玩具直立状态时的结构示意图,图4为该实施例前趴
状态时的结构示意图,图中:1-曲柄,3-限位柱,4-摇杆,5-拉钩,6-后腿杆,7-枢轴,8-压力弹簧,9-行走连杆,10-s型曲轴,11-前腿杆,12-连杆,13-机架,22-下趴连杆二;
14.图5为本实用新型再一实施例玩具直立状态时的结构示意图,图6为该实施例前趴状态时的结构示意图,图中:1-曲柄,3-限位柱,4-摇杆,6-后腿杆,7-枢轴,8-压力弹簧,9-行走连杆,10-s型曲轴,11-前腿杆,12-连杆,13-机架,32-下趴连杆三,51-弹簧吊柱。
具体实施方式
15.1. 如图1、2所示,动物玩具的腿杆驱动机构除机架及机架上安装的驱动电机及传动变速机构、控制机构(均未在图中显示)外,有前腿杆11、后腿杆6、行走连杆9、连杆12、s型曲轴10、曲柄1、下趴连杆一2、摇杆4。其中前腿杆安装在s型曲轴上的偏心短轴上,后腿杆以枢轴7安装在机架13(图中所示为与机架固定安装的电池盒)上,后腿杆上端(在枢轴安装孔之上)与s型曲轴上的偏心短轴之间以行走连杆连接。曲柄是由转动轮端面上设置两个偏心短柱构成的,两个偏心短柱设置在转动轮的同一径线、同一圆周上。下趴连杆一垂直于偏心短柱设置,其后端经连杆与前腿杆上端(在s型曲轴安装孔之上)连接,另一端与曲柄连接。下趴连杆一与曲柄的连接方式是:下趴连杆一靠于偏心短柱的下侧,在下趴连杆一上侧有缺口,而下趴连杆一与连杆连接的点之后有一弯曲向上的拉钩5,拉钩上挂有压力弹簧8,所用压力弹簧是螺旋圆柱弹簧,压力弹簧的另一端固定于下方的机架上。弹簧下端在机架上的固定位置,使弹簧两端连线当玩具直立时在摇杆的摆动中心轴之前,当玩具下趴时在摇杆的摆动中心轴之后。使下趴连杆一得到一个让缺口向上压向偏心短柱的弹力和当下趴连杆前移或后移到位后,摇杆和连杆能形成一个相对稳定的角度,不使玩具的直立或下趴姿态有非可控变化。下趴连杆一上缺口是由两侧的凸起围成的,凸起外侧以圆弧与连杆边连接,使偏心短柱可以在凸起外侧与连杆边的圆滑的连接处移动。在下趴连杆一下侧边有一开口向后的钩扣21,机架上固定有一限位柱3,两者配合形成限位结构,使下趴连杆一向后移动到钩扣与限位柱相扣时不能再向后移动,从而保证下个周期偏心短柱能够和缺口配合。连接连杆与下趴连杆一的铰轴是从摇杆的上端向外折转形成的,该摇杆是左右两条的,两条摇杆的下端相连成安装到机架13上的枢轴,摇杆呈u型结构。且下趴连杆和连杆后端由摇杆连接到机架上,从而对下趴机构的运动达成约束。下趴连杆一、连杆、摇杆之间的连接不一定要用同一个枢轴连接,可以是下趴连杆一与连杆、连杆与摇杆分别连接,或下趴连杆一与连杆、下趴连杆一与摇杆分别连接,或下趴连杆一与摇杆、连杆与摇杆分别连接。当下趴连杆一与摇杆连接时,拉钩就设置在下趴连杆一与摇杆连接的点之后。
16.u型摇杆中另一侧也连接有连杆,连杆前端同样连接该侧前腿杆处于与s型曲轴安装孔之上的上端。
17.执行下趴动作时,首先传动机构中动作切换机构将驱动力从驱动s型曲轴转移到曲柄上,由于s型曲轴不工作,因此其上偏心短轴可视作是下趴动作时前腿杆摆动的中心轴,而行走连杆和后腿杆也是不动的。
18.曲柄先作逆时针转动,偏心短柱通过缺口将下趴连杆一向后压,此时摇杆限制了连杆与下趴连杆一铰接点的动作轨迹,使连杆在受控状态下向后拉而前腿杆向上摆起(从图1状态变化到图2状态,玩具所处平面是地平线l)。下趴连杆一上的钩扣与限位柱相抵时偏心短柱对下趴连杆一向后推的幅度达到最大,转动轮继续逆时针转动,则与缺口相合的
偏心短柱变为向上转,下趴连杆一在压力弹簧的作用下跟随向上抬起。由于下趴连杆一前端与缺口之间的距离大于两个偏心短柱之间的距离,当转动轮继续逆时针转动时另一个偏心短柱会压在下趴连杆一前端上。下趴连杆前端有引导偏心短柱进入其缺口以前圆弧边的功能,可称为引导段。此时,一方面与缺口相合的偏心短柱向上转,另一方面未与缺口相合的另一个偏心短柱向下转,使下趴连杆一稍有向下摆动并且使缺口脱出相合的偏心短柱。转动轮继续逆时针转动,偏心短柱在下趴连杆一前端形成缺口的凸起外滑动从而使转轮空转,下趴连杆一在滑动的偏心短柱和压力弹簧的作用下,作轻微上下摆动,而摆动中心轴是下趴连杆一和连杆之间的铰接轴,即下趴连杆一的摆动不会使连杆作响应,玩具下趴的状态得以保持。此时限位柱与开口之间的关系是下趴连杆一的摆动时,限位柱总是位于开口内。即形成下趴连杆一上钩扣的开口的前侧边,其上任何点与此时连杆与下趴连杆一的铰接点之间的距离不小于限位柱前侧与此时连杆与下趴连杆一的铰接点之间的距离,其长度不短于下趴连杆一摆动时相对限位柱的位移所需要距离。
19.曲柄在倒顺转切换控制装置的控制下作了一定时间的逆时针转动后反转作顺时针转动。偏心短柱重新扣入缺口将下趴连杆一向前拉,前腿杆向下回复(从图2状态变化到图1状态)。转动轮继续转动则另一偏心短柱压下下趴连杆一而此一偏心短柱继续向上转使其脱出缺口。转动轮继续转动,与逆时针转动时一样,两个偏心短柱相继在缺口以后位置上打滑,在偏心短柱和压力弹簧的作用下,下趴连杆一作轻微上下摆动而不改变连杆姿态,使前腿杆保持直立状态。
20.2. 如图3、4所示,该动物玩具的腿杆驱动机构除机架及机架上安装的机械装置外,有前腿杆11、后腿杆6、行走连杆9、连杆12、s型曲轴10、曲柄1、下趴连杆二22、摇杆4。有以安装在s型曲轴上的前腿杆、经枢轴7安装在机架上的后腿杆、行走连杆以及机架13构成的行走机构。有以曲柄、下趴连杆二、连杆、前腿杆以及机架构成的下趴机构。摇杆同样是u型的,上端折转充当铰轴将下趴连杆二后端和连杆后端铰接,下边连接杆安装在机架连接上,作为下趴约束机构。
21.本例下趴连杆二与上例下趴连杆一之间的区别在于没有设置钩扣,即两例之间的区别在于限位结构的不同。
22.本例的限位结构是在机架上设置有限位柱3,限位柱经立柱固定在机架上横向拦于摇杆的后方,当下趴连杆二向后推到设计的最后位置时,摇杆靠在限位柱上。摇杆靠在限位柱上时,下趴连杆二将连杆向后推到极限位置,前腿上摆到最高位,玩具呈现下趴,如图4所示状。下趴连杆二在下趴状态下的上下摆动时,限位柱在平直的摇杆上滑动。
23.3. 如图5、6所示,该动物玩具的腿杆驱动机构除机架及机架上安装的机械装置外,有前腿杆11、后腿杆6、行走连杆9、连杆12、s型曲轴10、曲柄1、下趴连杆三32、摇杆4。有以安装在s型曲轴上的前腿杆、经枢轴7安装在机架上的后腿杆、行走连杆以及机架13构成的行走机构。有以曲柄、下趴连杆三、连杆、前腿杆以及机架构成的下趴机构。
24.本例下趴连杆三与上例下趴连杆二之间的区别在于下趴连杆三的缺口设置在其下侧边上,转动轮的中心轴长度与下趴连杆三所在平面相交(或者转动轮中心有轴套台阶与下趴连杆三所在平面相交),压力弹簧8安装在下趴连杆三上与连杆铰接点之前设置的弹簧吊柱51与机架上安装后腿杆的枢轴7之间。
25.当曲柄作顺时针转动时,曲柄上的偏心短柱经下趴连杆三的缺口推动下趴连杆三
向后移,下趴连杆三经连杆将前腿杆上端向后拉,则前腿杆下端往上摆,玩具呈现下趴状态,如图6所示状态。曲柄继续顺时针转动,下趴连杆三的引导段同样引导两个偏心短柱在下趴连杆三下侧滚动,此时下趴连杆三在偏心短柱顶动和压力弹簧作用下作上下摆动,下趴连杆下摆动幅度受转动轮中心轴对下趴连杆三的阻挡的限制。当曲柄作逆时针转动时,偏心短柱会重新扣入缺口,曲柄上的偏心短柱经下趴连杆三的缺口拉动下趴连杆三向前移,同样下趴连杆三经连杆将前腿杆上端往前推,玩具呈现直立状态,如图5所示状态。曲柄继续逆时针转动,偏心短柱在缺口之后的下趴连杆三下侧滚动。
26.本例的限位结构与上例相同,都是以限位柱与摇杆之间的抵触来限位的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1