一种基于主动反馈的康复训练系统与方法
1.本发明涉及康复器械领域,特别涉及一种基于主动反馈的康复训练系统与方法。
背景技术:
[0002]“脑卒中”又称“中风”、“脑血管意外”。是一种急性脑血管疾病,是由于脑部血管突然破裂或因血管阻塞导致血液不能流入大脑而引起脑组织损伤的一组疾病,包括缺血性和出血性卒中,随着现代医学的水平不断提高,脑血管疾病的救治能力明显提高,死亡率大大降低,但致残率却相对升高,导致患者在言语、吞咽、认知、运动能力、步行能力等方面的障碍,尤其是肢体运动功能障碍严重影响步行能力及日常生活活动能力的恢复,因此恢复步行能力,对偏瘫患者日常生活活动能力的提高和患者生命质量的改善具有十分重要的意义。
[0003]
脑卒中引起患者肢体运动功能障碍的康复需要漫长的周期,因此在康复训练过程中,需要进行科学、系统的指导,目前,针对于脑卒中患者的康复训练系统存在以下问题:一是训练系统的针对性较差,并不能根据患者个体做出针对性的指导,导致患者在训练过程中出现运动过渡或者运动不足的现象,影响患者的康复效果;二是训练系统的智能化程度较低、可调节性较差,往往是系统给出训练方案,患者被动接受,不能根据患者训练过程中的实时状态来进行调节,机械性较强,可调节范围小,不能满足患者系统性训练的需求;三是训练过程中的监管力度不够,由于恢复周期长,训练过程中专业人员的参与度低,导致训练过程中患者多是在独立状态下进行,很容易产生运动性疲劳和损伤,不利于患者的恢复,为此,我们提出一种基于主动反馈的康复训练系统与方法。
技术实现要素:
[0004]
本发明的主要目的在于提供一种基于主动反馈的康复训练系统与方法,可以有效解决背景技术中的问题。
[0005]
为实现上述目的,本发明采取的技术方案为:一种基于主动反馈的康复训练系统,所述的康复训练系统包括行走能力训练模块、神经疲劳特征量采集模块、肢体疲劳特征量采集模块和信息处理模块,所述行走能力训练模块与信息处理模块之间无线通信,所述神经疲劳特征量采集模块和肢体疲劳特征量采集模块均与行走能力训练模块连接,并分别用于获取患者使用行走能力训练模块过程中的脑肌电信号、相关肌肉的肌电信号以及步态信息,并将获取的信息通过通信电缆发送至信息处理模块。
[0006]
所述行走能力训练模块包括机体组、身份信息识别模块、步态训练机构、行走训练机构和上肢摆动训练机构,所述身份信息识别模块安装于机体组前侧,用于识别和储存使用者身份信息以及训练数据信息,所述步态训练机构安装于机体组上侧,用于偏瘫步态的矫正,所述行走训练机构安装于机体组内部,用于患者步行能力的训练,所述上肢摆动机构安装于步态训练机构两侧,用于使用者步行过程中上肢的摆动训练。
[0007]
所述神经疲劳特征量采集模块为穿戴式脑电信号采集设备,用于获取使用者训练
过程中的脑电慢波与脑电快波,并计算采集到的脑电慢波与脑电快波的能量比值。
[0008]
所述肢体疲劳特征量采集模块包括患肢侧采样电极、对照组采样电极和肌电信号采集仪,所述患肢侧采样电极用于使用者运动过程中患肢侧相关肌肉的肌电信号采集,所述对照组采样电极用于使用者运动过程中正常一侧肢体相关肌肉的肌电信号采集。
[0009]
进一步的,所述步态训练机构包括安装架、安装板、驱动电机、传动机构、连杆机构、足部固定器和足底压力采集传感器,所述安装架为空心结构,所述安装板与安装架螺栓连接,所述驱动电机安装于安装架内部,并通过传动机构带动连杆机构往复转动,所述足部固定器跟随连杆机构转动,并通过固定在其端部的足底压力采集传感器获取使用者的足底压力值。
[0010]
进一步的,所述上肢摆动训练机构包括伸缩杆、扶手、转轴、双向扭簧和转角传感器,所述伸缩杆下端围绕转轴转动,且伸缩杆与双向扭簧连接,所述转角传感器安装于转轴的内侧端面,用于检测转轴的转动角度。
[0011]
进一步的,所述传动机构为带轮式传动机构,所述连杆机构包括连杆、套筒和缓冲弹簧,所述连杆和缓冲弹簧均对称安装于套筒内部,并与套筒滑动连接,且一侧的连杆与安装板固定连接,另一侧的连杆与足部固定器转动连接。
[0012]
进一步的,所述机体组包括底座、支撑架和限位器,所述支撑架安装于底座上端,且支撑架为伸缩结构,所述限位器用于支撑架的限位,所述身份信息识别模块包括显示器、识别摄像头和内置无线通信模块,所述显示器安装于支撑架的内侧,所述识别摄像头和内置无线通信模块均安装于显示器内部,所述行走训练机构包括对称分布在安装架两侧的履带、转辊、传动器和驱动器。
[0013]
进一步的,所述的脑电慢波频率在4-8赫兹,所述的脑电快波频率在13-40赫兹。
[0014]
进一步的,所述的相关肌肉为臀大肌、髂腰肌、股四头肌、缝匠肌、腘绳肌、胫前肌、小腿三头肌、胸大肌、肱桡肌、肱二头肌和桡侧腕屈伸肌。
[0015]
进一步的,该装置的使用方法包括以下步骤:步骤一,通过身份信息识别模块的识别摄像头对使用者进行面部识别,根据个人信息读取储存的训练数据,并根据存储的训练数据确定训练方案,并依据训练方案调节行走能力训练模块中驱动电机和驱动器的运行参数;步骤二,通过行走能力训练模块的足底压力采集传感器采集使用者训练过程中的足底压力值,通过神经疲劳特征量采集模块获取使用者训练过程中的脑电慢波与脑电快波信号,通过肢体疲劳特征量采集模块获取使用者臀大肌、髂腰肌、股四头肌、缝匠肌、腘绳肌、胫前肌、小腿三头肌、胸大肌、肱桡肌、肱二头肌和桡侧腕屈伸肌等相关肌肉群的肌电信号;步骤三,通过信息处理模块计算脑电慢波与脑电快波的能量比值判断使用者是否出现精神疲劳,通过对采集的相关肌肉的肌电信号进行分析,判断使用者是否出现肢体疲劳,通过获得的分析结果,信息处理模块发出不同的控制指令至驱动电机和驱动器,调节驱动电机和驱动器的运行参数。
[0016]
与现有技术相比,本发明具有如下有益效果:1)该康复训练系统基于患者运动过程中的脑肌电信号、相关肌肉的肌电信号以及步态信息,对使用者运动过程进行实时监测,根据系统采集的各项评价指标数据判断使用
者的脑疲劳程度和肌肉疲劳程度,并依据判定结果反馈控制运动参数,智能化程度较高,同时可以避免使用者出现运动性损伤和运动痉挛的情况;2)该系统可以存储不同使用者的训练数据,并针对使用者的给出合理的、科学的运动指导,使患者保持适度适量的运动量,且可以通过对运动数据的采集实现对整个运动过程中进行实时监管,可调节性强,可以满足不同患者系统性训练的需求,有利于患者的康复;3)通过设置的行走能力训练模块,可以在不同模式下对患者的行走能力和肢体平衡能力进行训练,同时在患者运动过程中,通过足底压力采集传感器采集患者足底的压力值,通过安装于转轴的内侧端面的转角传感器,获取患者上肢摆动的角度值,结合患者的肌电信号,可以对患者的行走能力和行走步态进行评定,便于对患者的偏瘫步态进行针对性的纠正,帮助患者恢复行走能力。
附图说明
[0017]
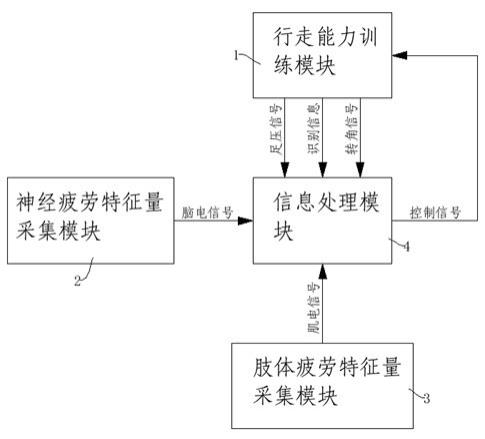
图1为本发明的系统框图;图2为本发明行走能力训练模块的整体结构示意图;图3为本发明行走能力训练模块的爆炸图;图4为本发明步态训练机构的爆炸图;图5为本发明连杆机构的爆炸图。
[0018]
图中:1、行走能力训练模块;11、机体组;111、底座;112、支撑架;113、限位器;12、身份信息识别模块;121、显示器;122、识别摄像头;123、内置无线通信模块;13、步态训练机构;131、安装架;132、安装板;133、驱动电机;134、传动机构;135、连杆机构;135a、连杆;135b、套筒;135c、缓冲弹簧;136、足部固定器;137、足底压力采集传感器;14、行走训练机构;141、履带;142、转辊;143、传动器;144、驱动器;15、上肢摆动训练机构;151、伸缩杆;152、扶手;153、转轴;154、双向扭簧;155、转角传感器;2、神经疲劳特征量采集模块;3、肢体疲劳特征量采集模块;31、患肢侧采样电极;32、对照组采样电极;33、肌电信号采集仪;4、信息处理模块。
具体实施方式
[0019]
下面结合具体实施方式对本发明作进一步的说明,其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制,为了更好地说明本发明的具体实施方式,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
[0020]
实施例1如图1、图2所示,一种基于主动反馈的康复训练系统与方法,康复训练系统包括行走能力训练模块1、神经疲劳特征量采集模块2、肢体疲劳特征量采集模块3和信息处理模块4,行走能力训练模块1与信息处理模块4之间无线通信,神经疲劳特征量采集模块2和肢体疲劳特征量采集模块3均与行走能力训练模块1连接,并分别用于获取患者使用行走能力训练模块1过程中的脑肌电信号、相关肌肉的肌电信号以及步态信息,并将获取的信息通过通信电缆发送至信息处理模块4。
[0021]
行走能力训练模块1包括机体组11、身份信息识别模块12、步态训练机构13、行走
训练机构14和上肢摆动训练机构15,身份信息识别模块12安装于机体组11前侧,用于识别和储存使用者身份信息以及训练数据信息,步态训练机构13安装于机体组11上侧,用于偏瘫步态的矫正,行走训练机构14安装于机体组11内部,用于患者步行能力的训练,上肢摆动机构15安装于步态训练机构13两侧,用于使用者步行过程中上肢的摆动训练。
[0022]
神经疲劳特征量采集模块2为穿戴式脑电信号采集设备,用于获取使用者训练过程中的脑电慢波与脑电快波,并计算采集到的脑电慢波与脑电快波的能量比值。
[0023]
肢体疲劳特征量采集模块3包括患肢侧采样电极31、对照组采样电极32和肌电信号采集仪33,患肢侧采样电极31用于使用者运动过程中患肢侧相关肌肉的肌电信号采集,对照组采样电极32用于使用者运动过程中正常一侧肢体相关肌肉的肌电信号采集。
[0024]
脑电慢波频率在4-8赫兹,脑电快波频率在13-40赫兹。
[0025]
相关肌肉为臀大肌、髂腰肌、股四头肌、缝匠肌、腘绳肌、胫前肌、小腿三头肌、胸大肌、肱桡肌、肱二头肌和桡侧腕屈伸肌。
[0026]
通过采用上述技术方案:在肢体运动中,肌纤维激活将产生微伏级的生物电压,并在皮肤表面叠加形成微弱的电信号,即表面肌电信号,作为肢体对神经运动控制的实时客观响应,表面肌电信号常被用来实现对人体主动运动意图的解析,积分肌电值是表面肌电信号经整流滤波后单位时间内曲线下面积的总和,可以反映出肌电信号活动性的强弱,研究表明,随着肌肉疲劳程度的加深,代谢性酸化引起肌细胞内h +
积累,使得肌纤维动作电位传导速度下降,导致表面肌电信号频谱向低频转移,因此,可利用表面肌电信号信号功率曲线中心位置频率值,反映肌肉的疲劳程度,随着运动疲劳的加深,表面肌电信号信号功率曲线中心位置频率值呈下降趋势,另一方面,在康复运动中,随运动疲劳程度加深,脑电慢波( 4~8 hz波) 逐渐增加,快波( 13~40 hz波) 逐渐减少,因此,可通过计算脑电信号的慢波和快波的能量比,即脑疲劳指数,反映大脑的疲劳程度,在电极安放前,头皮须吹洗干净,皮肤表面须用酒精擦拭干净,采样频率设为1000hz,并进行50hz陷波处理,同时滤除基线漂移的噪声干扰,对原始脑电信号进行4~40hz带通滤波,对肌电信号进行10~200hz的带通滤波,以提取脑电信号和肌电信号的有效频段,通过设置的神经疲劳特征量采集模块2获取使用者训练过程中的脑电慢波与脑电快波信号,并将获取的脑电波信号发送至信息处理模块4处,计算出脑疲劳指数,通过肢体疲劳特征量采集模块3获取使用者臀大肌、髂腰肌、股四头肌、缝匠肌、腘绳肌、胫前肌、小腿三头肌、胸大肌、肱桡肌、肱二头肌和桡侧腕屈伸肌等相关肌肉群的肌电信号,并通过数据线发送至信息处理模块4处,信息处理模块4通过计算出的脑疲劳指数和表面肌电信号信号功率曲线中心位置频率值来判断使用者运动过程中的脑疲劳程度和肌肉疲劳程度,当使用者出现脑疲劳程度增加但肌肉疲劳程度未增加时,说明该使用者肌肉状态处于优良状态,但精神状态出现懈怠情况,此时应保持驱动电机133和驱动器144的运行参数,并通过显示器121播放鼓励性的短片,以帮助使用者克服内心的不良感受,保持积极的运动状态。当使用者出现脑疲劳程度未增加但肌肉疲劳程度增加时,说明该使用者的肢体已处于超负荷状态,此时,信息处理模块4发出控制指令至驱动电机133和驱动器144,减小驱动电机133和驱动器144的转动速度,以降低使用者的肌肉符合程度,避免使用者出现运动损伤或者肌肉痉挛的情况,同时设置有患肢侧采样电极31和对照组采样电极32,分别采集使用者运动过程中患肢侧相关肌肉的肌电信号和正常一侧肢体相关肌肉的肌电信号,可以形成对比,分析使用者运动过程中正常侧肌肉与患肢侧肌肉
之间的差异,对于指导患者良肢位的摆放、日常生活肢体姿态的保持和辅助性矫正设备的设计均有着实际意义。
[0027]
实施例2如图1-5所示,一种基于主动反馈的康复训练系统与方法,康复训练系统包括行走能力训练模块1、神经疲劳特征量采集模块2、肢体疲劳特征量采集模块3和信息处理模块4,行走能力训练模块1与信息处理模块4之间无线通信,神经疲劳特征量采集模块2和肢体疲劳特征量采集模块3均与行走能力训练模块1连接,并分别用于获取患者使用行走能力训练模块1过程中的脑肌电信号、相关肌肉的肌电信号以及步态信息,并将获取的信息通过通信电缆发送至信息处理模块4。
[0028]
行走能力训练模块1包括机体组11、身份信息识别模块12、步态训练机构13、行走训练机构14和上肢摆动训练机构15,身份信息识别模块12安装于机体组11前侧,用于识别和储存使用者身份信息以及训练数据信息,步态训练机构13安装于机体组11上侧,用于偏瘫步态的矫正,行走训练机构14安装于机体组11内部,用于患者步行能力的训练,上肢摆动机构15安装于步态训练机构13两侧,用于使用者步行过程中上肢的摆动训练。
[0029]
步态训练机构13包括安装架131、安装板132、驱动电机133、传动机构134、连杆机构135、足部固定器136和足底压力采集传感器137,安装架131为空心结构,安装板132与安装架131螺栓连接,驱动电机133安装于安装架131内部,并通过传动机构134带动连杆机构135往复转动,足部固定器136跟随连杆机构135转动,并通过固定在其端部的足底压力采集传感器137获取使用者的足底压力值。
[0030]
上肢摆动训练机构15包括伸缩杆151、扶手152、转轴153、双向扭簧154和转角传感器155,伸缩杆151下端围绕转轴153转动,且伸缩杆151与双向扭簧154连接,转角传感器155安装于转轴153的内侧端面,用于检测转轴153的转动角度。
[0031]
传动机构134为带轮式传动机构,连杆机构135包括连杆135a、套筒135b和缓冲弹簧135c,连杆135a和缓冲弹簧135c均对称安装于套筒135b内部,并与套筒135b滑动连接,且一侧的连杆135a与安装板132固定连接,另一侧的连杆135a与足部固定器136转动连接。
[0032]
机体组11包括底座111、支撑架112和限位器113,支撑架112安装于底座111上端,且支撑架112为伸缩结构,限位器113用于支撑架112的限位,身份信息识别模块12包括显示器121、识别摄像头122和内置无线通信模块123,显示器121安装于支撑架112的内侧,识别摄像头122和内置无线通信模块123均安装于显示器121内部,行走训练机构14包括对称分布在安装架131两侧的履带141、转辊142、传动器143和驱动器144。
[0033]
通过采用上述技术方案:行走能力训练模块1在使用时有以下几种训练模式:一是主动训练模式:患者双足固定在足部固定器136内部,由患者主动发力带动足部固定器136运动,患者的双手可以握住机体组11的扶手,也可以握住上肢摆动训练机构15的扶手152做同步摆动;二是被动训练模式:患者双足固定在足部固定器136内部,驱动电机133通电运行,并通过传动机构134带动东连杆机构135往复转动,此时患者下肢跟随足部固定器136运动,做被动性训练;三是步行训练模式,患者的双足分别站立在履带141上端,驱动器144运行带动传动器143转动,传动器143通过转辊142带动履带144转动,通过控制履带144的转动速度实现患者步行速度的调控,帮助患者进行行走能力的训练。在患者运动过程中通过足底压力采集传感器137采集患者足底的压力值,通过安装于转轴153的内侧端面的转角传感
器155,检测转轴153的转动角度,以获取患者上肢摆动的角度值,结合患者的肌电信号,可以对患者的行走能力和行走步态进行评定,便于对患者的偏瘫步态进行针对性的纠正,帮助患者恢复行走能力。
[0034]
需要说明的是,本发明为一种基于主动反馈的康复训练系统与方法,在使用时,通过身份信息识别模块12的识别摄像头122对使用者进行面部识别,根据个人信息读取储存的训练数据,并根据存储的训练数据确定训练方案,并依据训练方案调节行走能力训练模块1中驱动电机133和驱动器144的运行参数,通过行走能力训练模块1的足底压力采集传感器137采集使用者训练过程中的足底压力值,通过神经疲劳特征量采集模块2获取使用者训练过程中的脑电慢波与脑电快波信号,通过肢体疲劳特征量采集模块3获取使用者臀大肌、髂腰肌、股四头肌、缝匠肌、腘绳肌、胫前肌、小腿三头肌、胸大肌、肱桡肌、肱二头肌和桡侧腕屈伸肌等相关肌肉群的肌电信号,通过信息处理模块4计算脑电慢波与脑电快波的能量比值判断使用者是否出现精神疲劳,通过对采集的相关肌肉的肌电信号进行分析,判断使用者是否出现肢体疲劳,通过获得的分析结果,信息处理模块4发出不同的控制指令至驱动电机133和驱动器144,调节驱动电机133和驱动器144的运行参数。
[0035]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1