一种远程垂钓方法与流程
1.本发明涉及一种远程垂钓方法,属于物联网领域。
背景技术:
2.钓鱼爱好者喜欢钓鱼,对于不同的鱼的垂钓都会饶有兴趣,然而不同的鱼所处的位置往往千里之遥;或者由于天气和时间原因,钓鱼爱好者经常会遇到有时间的时候,赶不上好的垂钓天气,或者天气好,但是没有足够的时间往返。而在野外垂钓时,垂钓环境差,蚊虫多,甚至河边不安全等,使得垂钓者又向往一种好的垂钓环境。
3.甚至,我们可以发现,很多人并不是真的钓鱼达人,但是却想要享受钓鱼这种游戏的乐趣,没有钓鱼经验,纯粹向往在一种舒适休闲的环境下享受钓鱼的乐趣。
4.然而,生活中很多情况下,我们被事务缠身,或者周六日短暂的休息时间,不足以让我们去想要垂钓的地点,而作为一种纯娱乐活动的休闲垂钓,更是难以实现在舒适休闲的环境下享受野外钓鱼的乐趣。这显然是一种商机,但却是矛盾体,如何让这种需要得到满足,是研究的重点。
技术实现要素:
5.本发明的目的在于解决背景技术中钓鱼爱好者或单纯的娱乐爱好者在时间、空间、成本中所遇到的问题,提供一种远程垂钓方法,使其在想要钓鱼时,可以借助平台实现身临其境的钓鱼快乐,又没有蚊虫叮闹和不安全因素。
6.为达到上述目的,本发明公开了一种远程垂钓方法,包括物联网平台、钓鱼机器人终端、用户端,所述钓鱼机器人终端被布置在各种钓鱼的环境中,所述物联网平台连接钓鱼机器人终端和用户端,用户在用户端选择钓场和钓鱼机器人终端,并向物联网平台下单,所述用户端包括购买或租借的钓鱼模拟器和vr装备,用户操作钓鱼模拟器通过物联网平台远程连接对应的钓鱼机器人终端,通过vr装备操控垂钓。
7.进一步的,所述钓鱼机器人终端包括物联网通讯模块、基座和安装在基座顶端面上的双臂仿生机器人,在基座一侧开口,从开口向基座的空腔内设置上鱼滑板,在上鱼滑板位于基座空腔内的一侧设置夹鱼器,并在位于夹鱼器的上方设置挡针脱钩器,双臂仿生机器人的其中一个手臂为持杆臂,鱼竿安装在持杆臂上,另一手臂为脱钩臂,手持脱钩器安装在脱钩臂上,回转饵料箱安装在脱钩臂侧的基座上,物联网通讯模块安装在双臂仿生机器人或基座上。
8.更进一步的,所述持竿臂上安装有鱼竿夹持器,鱼竿夹持器内设置两维力传感器,分别检测鱼竿对持杆臂的水平和竖直拉力。
9.更进一步的,所述回转饵料箱包括饵料箱、回转电机和喇叭口,在饵料箱的上部及朝向双臂仿生机器人的一侧开缺口,朝向双臂仿生机器人一侧的缺口安装喇叭口,用于鱼钩导入,饵料箱内设置带缺口的回转杯,回转杯的上缺口略小于饵料箱的上部缺口,回转杯与回转电机输出轴连接,回转电机驱动回转杯每次转动若干圈,让饵料在回转杯内翻滚且
停止时保持回转杯缺口朝上。
10.更进一步的,喇叭口底部设置强磁铁,方便将鱼钩贴着喇叭口底部进入饵料箱底部,饵料箱上部的开口方便鱼钩带着拉饵拉出。
11.更进一步的,所述夹鱼器为左右对称放置的电动伸缩夹,内侧采用弹性材质,使得既能夹住体型较大的鱼保持不动,便于拆钩,且保护鱼不受伤。
12.更进一步的,所述双臂仿生机器人还包括一个具有曲面屏的头部和安装在头部的摄像头,摄像头和曲面屏连接物联网通讯模块,机器人的面部采用曲面屏可以实时显示用户的面部表情,用于与其他钓友现场沟通和分享钓鱼的欢乐,摄像头用于对现场环境进行采集并反馈至用户的vr设备上。
13.进一步的,所述用户端的钓鱼模拟器包括座箱,模拟控制器安装在座箱内,在座箱的一侧开口,伺服收线电机安装在开口处向内的座箱内腔中,伺服收线电机连接绕线轮,模拟线一端安装在绕线轮上,摆杆一端安装在伺服偏转电机上,伺服偏转电机安装在座箱内腔中,模拟线穿过摆杆,另一端连接模拟竿,模拟杆固定在模拟杆支架上,模拟杆支架安装在座箱一侧,在座箱的另一侧设置脱钩器支架,模拟脱钩器安装在脱钩器支架上。
14.所述模拟竿前端连接模拟线,模拟线穿过摆杆与伺服收线机上的绕线轮连接,并被伺服收线机牵引实时模拟鱼的下潜拉线动作。用户操作钓鱼模拟器,远程操控钓鱼机器人完成挂饵、抛竿、提鱼、溜鱼动作,钓鱼机器人手臂末端的鱼竿夹持器内设置两维力传感器,钓鱼机器人终端将鱼牵扯鱼竿的拉力大小和方向通过物联网平台实时反馈到用户端的模拟控制器中,钓鱼模拟器根据拉力方向实时控制伺服偏转电机带动摆杆模拟鱼的跑位方向,并根据两维力的合力实时控制伺服收线机的输出力矩,模拟鱼在水中的动态拉力,给用户反馈出逼真的手感。
15.更进一步的,所述模拟竿的重量和重心分布与实际钓竿相当,模拟竿中内置陀螺仪加速度传感器作为姿态传感器,根据姿态传感器的数据实时控制钓鱼机器人的持竿状态使鱼竿运动完全跟随模拟竿的动作。
16.更进一步的,用户的身上穿戴运动姿态传感器,根据用户的运动状态实时控制钓鱼机器人的持竿臂动作。
17.更进一步的,所述模拟竿的把手位置处设置微动开关或触摸传感器,在模拟控制器与钓鱼机器人终端的机器人成功连接后,人手握住模拟竿把手时即刻启动持竿机器手臂跟随运动,人手松开模拟杆把手时即刻停止机器人手臂跟随运动。
18.更进一步的,所述模拟脱钩器中内置陀螺仪加速度传感器作为姿态传感器,根据姿态传感器的数据实时控制钓鱼机器人的脱钩机器手臂做跟随运动,完成脱钩动作。
19.更进一步的,用户的身上穿戴运动姿态传感器,系统根据用户的运动状态实时控制钓鱼机器人的脱钩臂动作。
20.更进一步的,所述模拟脱钩器把手位置设置微动开关或触摸传感器,在模拟控制器与机器人成功连接后,人手握住模拟脱钩器把手即刻启动脱钩机器手臂跟随运动,人手松开模拟脱钩器把手即刻停止脱钩机器手臂跟随运动。
21.更进一步的,所述摆杆前端设置回转弯头,回转弯头可以在摆杆上自由摆动。
22.进一步的,所述物联网平台包括具有用户信息、钓鱼机器人终端信息以及钓场环境信息的数据库和管理系统,用户登记信息并认证后,通过互联网将钓鱼机器人终端信息
和钓场信息提供给用户选择,用户选择钓场和钓鱼机器人终端并支付费用,管理系统将连接信息发送给用户,用户远程连接对应钓鱼机器人终端。
23.更进一步的,所述管理系统提供饵料、窝料的在线选择,用户下单后,由钓场管理人员将饵料配送至与用户端成功连接的钓鱼机器人终端的回转饵料箱和打窝船,并将窝料放置在打窝船上,由用户远程控制打窝船进行打窝,打窝完成后,打窝船自动返航到钓场管理人员处。
24.更进一步的,所述支付费用包括用户后付费模块,在用户与平台及第三方支付系统签订后付费服务协议后,管理系统根据用户的垂钓时间、钓场环境、鱼获归属资料计算费用,并发送付费信息至用户确认。
25.更进一步的,所述物联网平台还包括钓鱼竞技榜模块和双视频同屏分享模块,用户自由选择是否参与竞技,或用户上传自己在用户端的垂钓过程视频,平台同步上传钓鱼机器人终端的钓鱼过程视频,并在管理系统中合成同屏分窗展示。
26.本发明的有益技术效果是:有效解决用户空闲时间、空间和垂钓之间的矛盾冲突,让用户足不出户即可进行真实的钓鱼运动。
附图说明
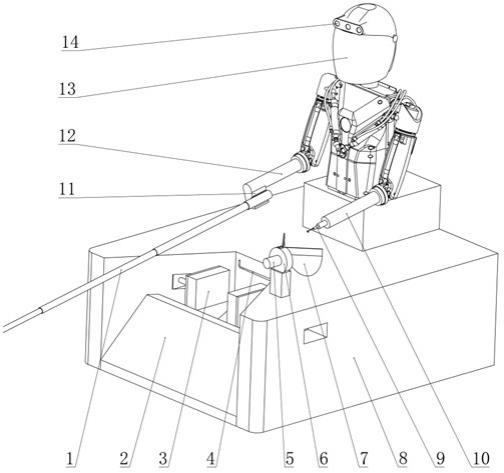
27.图1为本发明的钓鱼机器人端结构示意图;图2为本发明的用户端钓鱼模拟器前侧结构示意图;图3为本发明的用户端钓鱼模拟器后侧结构示意图;图4位本发明的饵料箱结构示意图;图5位本发明的饵料箱剖面结构示意图。
28.图中:1、鱼竿,2、上鱼滑板,3、夹鱼器,4、挡针脱钩器,5、回转电机,6、饵料箱,7、喇叭口,8、基座,9、手持脱钩器,10、脱钩臂,11、鱼竿夹持器,12、持竿臂,13、曲面屏,14、摄像头,15、回转杯,21、回转弯头,22、模拟线,23、摆杆,24、模拟竿,25、模拟杆支架,26、伺服偏转电机,27、伺服收线电机,28、绕线轮,29、控制器,30、座箱,31、模拟脱钩器,32、脱钩器支架。
具体实施方式
29.实施例1一种远程垂钓方法,包括物联网平台、钓鱼机器人终端、用户端,所述钓鱼机器人终端被布置在各种钓鱼的环境中,所述物联网平台连接钓鱼机器人终端和用户端,用户在用户端选择钓场和钓鱼机器人终端,并向物联网平台下单,所述用户端包括购买或租借的钓鱼模拟器和vr装备,用户操作钓鱼模拟器通过物联网平台远程连接对应的钓鱼机器人终端,通过vr装备操控垂钓。
30.这种方法,用户无需考虑钓鱼的地点,只要平台管理所能达到的地方,都能进行垂钓;无需考虑时间,可以是白天钓鱼,亦可以晚上,用户利用用户端模拟操作,而钓鱼机器人终端实施具体的钓鱼行为,通过物联网平台程序控制即可,vr装备能给予用户身临其境的感觉。
31.实施例2作为实施例1的具体部件设计,如图1、4、5所示,钓鱼机器人终端包括物联网通讯
模块、基座8和安装在基座8顶端面上的双臂仿生机器人,在基座8一侧开口,从开口向基座8的空腔内设置上鱼滑板2,在上鱼滑板2位于基座空腔内的一侧设置夹鱼器3,并在位于夹鱼器3的上方设置挡针脱钩器4,双臂仿生机器人的其中一个手臂为持杆臂12,鱼竿1安装在持杆臂12上,另一手臂为脱钩臂10,手持脱钩器9安装在脱钩臂10上,回转饵料箱安装在脱钩臂10侧的基座8上,物联网通讯模块安装在双臂仿生机器人或基座上。
32.其中,手持脱钩器为现有技术中的产品,可以直接拿来使用,不再叙述。
33.作为优选,所述持竿臂12上安装有鱼竿夹持器11,鱼竿夹持器11内设置两维力传感器,分别检测鱼竿1对持杆臂12的水平和竖直拉力。
34.作为优选,所述回转饵料箱包括饵料箱6、回转电机5和喇叭口7,在饵料箱6的上部及朝向双臂仿生机器人的一侧开缺口,朝向双臂仿生机器人一侧的缺口安装喇叭口7,用于鱼钩导入,饵料箱6内设置带缺口的回转杯15,回转杯15的上缺口略小于饵料箱6的上部缺口,回转杯15与回转电机5输出轴连接,回转电机5驱动回转杯15每次转动若干圈,让饵料在回转杯内翻滚且停止时保持回转杯缺口朝上。
35.作为优选,喇叭口7底部设置强磁铁,方便将鱼钩贴着喇叭口底部进入饵料箱底部,饵料箱上部的开口方便鱼钩带着拉饵拉出。
36.作为优选,所述夹鱼器3为左右对称放置的电动伸缩夹,内侧采用弹性材质,使得既能夹住体型较大的鱼保持不动,便于拆钩,且保护鱼不受伤。
37.作为优选,所述双臂仿生机器人还包括一个具有曲面屏13的头部和安装在头部的摄像头14,摄像头14和曲面屏13连接物联网通讯模块,机器人的面部采用曲面屏可以实时显示用户的面部表情,用于与其他钓友现场沟通和分享钓鱼的欢乐,摄像头用于对现场环境进行采集并反馈至用户的vr设备上。
38.实施例3作为实施例1的具体部件设计,如图2、3所示,用户端的钓鱼模拟器包括座箱30,模拟控制器安装在座箱30内,在座箱30的一侧开口,伺服收线电机27安装在开口处向内的座箱30内腔中,伺服收线电机27连接绕线轮28,模拟线22一端安装在绕线轮28上,摆杆23一端安装在伺服偏转电机26上,伺服偏转电机26安装在座箱30内腔中,模拟线22穿过摆杆23,另一端连接模拟竿24,模拟杆24固定在模拟杆支架25上,模拟杆支架25安装在座箱30一侧,在座箱30的另一侧设置脱钩器支架32,模拟脱钩器31安装在脱钩器支架32上。
39.所述模拟竿24前端连接模拟线22,模拟线22穿过摆杆23与伺服收线机27上的绕线轮28连接,并被伺服收线机27牵引实时模拟鱼的下潜拉线动作。用户操作钓鱼模拟器,远程操控钓鱼机器人完成挂饵、抛竿、提鱼、溜鱼动作,钓鱼机器人手臂末端的鱼竿夹持器内设置两维力传感器,钓鱼机器人终端将鱼牵扯鱼竿的拉力大小和方向通过物联网平台实时反馈到用户端的模拟控制器中,钓鱼模拟器根据拉力方向实时控制伺服偏转电机带动摆杆模拟鱼的跑位方向,并根据两维力的合力实时控制伺服收线机的输出力矩,模拟鱼在水中的动态拉力,给用户反馈出逼真的手感。
40.作为优选,所述模拟竿24的重量和重心分布与实际钓竿相当,模拟竿中内置陀螺仪加速度传感器作为姿态传感器,根据姿态传感器的数据实时控制钓鱼机器人的持竿状态使鱼竿运动完全跟随模拟竿的动作。
41.作为优选,用户的身上穿戴运动姿态传感器,根据用户的运动状态实时控制钓鱼
机器人的持竿臂动作。
42.作为优选,所述模拟竿24的把手位置处设置微动开关或触摸传感器,在模拟控制器与钓鱼机器人终端的机器人成功连接后,人手握住模拟竿把手时即刻启动持竿机器手臂跟随运动,人手松开模拟杆把手时即刻停止机器人手臂跟随运动。
43.作为优选,所述模拟脱钩器31中内置陀螺仪加速度传感器作为姿态传感器,根据姿态传感器的数据实时控制钓鱼机器人的脱钩机器手臂做跟随运动,完成脱钩动作。
44.作为优选,用户的身上穿戴运动姿态传感器,系统根据用户的运动状态实时控制钓鱼机器人的脱钩臂动作。
45.作为优选,所述模拟脱钩器31把手位置设置微动开关或触摸传感器,在模拟控制器与机器人成功连接后,人手握住模拟脱钩器把手即刻启动脱钩机器手臂跟随运动,人手松开模拟脱钩器把手即刻停止脱钩机器手臂跟随运动。
46.作为优选,所述摆杆23前端设置回转弯头21,回转弯头21可以在摆杆上自由摆动。
47.实施例4作为实施例1的具体部件设计,所述物联网平台包括具有用户信息、钓鱼机器人终端信息以及钓场环境信息的数据库和管理系统,用户登记信息并认证后,通过互联网将钓鱼机器人终端信息和钓场信息提供给用户选择,用户选择钓场和钓鱼机器人终端并支付费用,管理系统将连接信息发送给用户,用户远程连接对应钓鱼机器人终端。
48.作为优选,所述管理系统提供饵料、窝料的在线选择,用户下单后,由钓场管理人员将饵料配送至与用户端成功连接的钓鱼机器人终端的回转饵料箱和打窝船,并将窝料放置在打窝船上,由用户远程控制打窝船进行打窝,打窝完成后,打窝船自动返航到钓场管理人员处。
49.作为优选,所述支付费用包括用户后付费模块,在用户与平台及第三方支付系统签订后付费服务协议后,管理系统根据用户的垂钓时间、钓场环境、鱼获归属资料计算费用,并发送付费信息至用户确认。
50.作为优选,所述物联网平台还包括钓鱼竞技榜模块和双视频同屏分享模块,用户自由选择是否参与竞技,或用户上传自己在用户端的垂钓过程视频,平台同步上传钓鱼机器人终端的钓鱼过程视频,并在管理系统中合成同屏分窗展示。
51.本发明有效解决用户空闲时间、空间和垂钓之间的矛盾冲突,让用户足不出户即可进行真实的钓鱼运动。本发明所公开的实施例,不能作为对本发明方法的限定,而是对本发明方法的解释说明,在本发明基础上的简单变形或修改,依然是对本发明保护方法的侵权。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1