自动捡发球的网球服务机器人、控制方法及网球发球机
1.本发明属于机械工程技术领域,尤其涉及一种自动捡发球的网球服务机器人、控制方法及网球发球机。
背景技术:
2.当前国内外对解决网球训练的该类机器有某市某体育用品科技有限公司的s4015尊贵型时尚智能网球发球机。其采用全功能智能遥控,lcd界面,人性化合计,能够进行多种球的发射,满足不同的训练要求,使用电源包含交流100v、交流220v、直流12v。具有伸缩拉杆、移动方便。发球方式采用两个高速旋转的轮子(简称为对转双轮),设置合适的间距,当球进入到对转双轮之后受到挤压,然后从另一侧弹出。通过改变对转双轮的转速、转速差,从而发射不同角度的球。该发球机携带方便、功能齐全、操作简单、能够满足不同的训练强度。已处于高水平机器。同样其在价格上偏高,其消费领域不适用于普通家庭购买及学校大量购入。且其没有回收球的功能,在高强度的运动之后,球的回收问题无法解决。
3.网球发球机还有压气式发球机。其采用压缩空气的方式进行发球,压缩空气使用一个空气压缩机产生。球依次进入长桶的底部由一个窄口固定住。这个窄口的直径比球的直径略小一些。当压缩空气推挤网球穿过窄口的时候,球就被发射出去了。现有技术发球机消耗功率过大,很难采用电池供电,同时压缩空气的同时,会产生很大的噪音。相比转轮式发球机竞争优势不大。
4.通过上述分析,现有技术存在的问题及缺陷为:
5.(1)现有技术价格偏高,不适于普通家庭以及学校的大量入购,且没有回收球的功能,在高强度的运动之后,球的回收问题无法解决。
6.(2)功率消耗大,难以用电池供电,灵活性差。
7.(3)现有技术采用压缩空气发球,会产生很大的噪音。
技术实现要素:
8.为克服相关技术中存在的问题,本发明公开实施例提供了一种自动捡发球的网球服务机器人、控制方法及网球发球机。
9.所述技术方案如下:一种自动捡发球的网球服务机器人控制方法包括:将发球训练与网球回收集于一体,在满足训练要求的同时,能够进行场地回收网球;网球训练服务机器人具有两种操作模式,自动模式与蓝牙手柄控制的手动模式;储球装置左轮转盘,储球量大,满足高强度训练,发球稳定,具有单一通过性;角度调控的齿轮减速箱与车身底座的麦轮进行配合,实现发射的不同角度。
10.在一个实施例中,自动捡发球的网球服务机器人控制方法具体包括以下步骤:控制系统通过spi串口接收到蓝牙手柄的指令后向机械结构发送操作指令,并控制机械结构中上球装置的编码电机、角度调控装置的直流电机、网球发射装置的无刷电机、行走底盘的电机、收球装置的收球直流电机以及储球装置的储球直流电机转动,进行网球的上球、发
球、收球、行走。
11.在一个实施例中,所述网球发射装通过对发球角度的调控进行网球的定点球、水平球、垂直球、随机球的发射。
12.在一个实施例中,所述收球装置采用手动模式或自动模式进行网球收集;所述手动模式使用手柄进行操作收集;所述自动模式采用扫场模式,从一边角起,以s形方式,走完整个场地,收集整个场地的球;或采用摄像识别网球,对网球进行收集。
13.在一个实施例中,所述储球装置采用左轮式,进行网球单一通过。
14.本发明的另一目的在于提供一种自动捡发球的网球服务机器人包括:控制系统,通过spi串口接收到蓝牙手柄的指令后向机械结构发送操作指令所述操作指令包括自动模式和蓝牙手柄控制的手动模式,向机械结构中的上球装置的编码电机、角度调控装置的直流电机、网球发射装置的无刷电机、行走底盘的电机、收球装置的收球直流电机以及储球装置的储球直流电机发送指令,控制上述所有电机转动,实现机械结构的上球、发球、收球、行走;
15.机械结构,用于进行网球的上球、发球、收球、行走。
16.在一个实施例中,所述机械结构包括:上球装置,用于通过两个编码电机各自分别驱动两个滚筒刷,实现四个滚筒刷同方向转动,带动网球从底部向上运动,进行网球的上球;
17.角度调控装置,用于通过不同的圆柱齿轮进行相互啮合,形成三级减速,减速器内部齿轮通过光轴与发球装置连接,通过直流电机带动减速箱中齿轮转动带动光轴转动,通过光轴的转动从而使发球装置处于不同的角度,进行角度调控;
18.网球发射装置,用于通过两个高速转动的无刷电机挤压网球,进行发球;
19.行走底盘,用于通过电机驱动能够进行横移的麦克纳姆轮,进行行走;
20.收球装置,用于通过收球滚筒刷与收球直流电机的转动进行网球收球。
21.储球装置,用于将滚筒刷将网球由底部把带到储球装置顶部进入左轮转盘内部,使网球依次排队从左轮转盘圆孔进入弯道导管,进行储球。
22.在一个实施例中,网球经储球装置的弯道导管,进入网球发射装置,对转双轮采用摩擦轮,通过无刷电机高速旋转,挤压网球,获得动力;且另一侧通过网球发射圆柱齿轮、右侧网球发射光轴与第一圆柱齿轮进行啮合使网球发射装置与角度调控装置形成的减速箱进行连接;另一侧通过的左侧网球发射光轴通过u型连接板与机械结构的梁柱连接,使得网球发射装置能够进行发球角度调控,进行发球。
23.在一个实施例中,收球滚筒刷采用星型轮,胶棒插入收球滚筒刷侧壁中,收球直流电机电机转动经收球倾斜挡板将网球拨入底座,进行收球。
24.在一个实施例中,所述左轮转盘中部凸起,用于将网球滑落左轮转盘侧壁,左轮转盘上层开有多个左轮转盘圆孔。
25.本发明的另一目的在于提供一种智能网球发球机,所述智能网球发球机实施权所述的自动捡发球的网球服务机器人控制方法。
26.结合上述的所有技术方案,本发明所具备的优点及积极效果为:
27.第一、针对上述现有技术存在的技术问题以及解决该问题的难度,紧密结合本发明的所要保护的技术方案以及研发过程中结果和数据等,详细、深刻地分析本发明技术方
案如何解决的技术问题,解决问题之后带来的一些具备创造性的技术效果。具体描述如下:
28.本发明提供的自动捡发球机器人,采用自动模式与手动模式,将发球与收球结合到一起,提高了设备整体的灵活性与多功能性。通过对发球角度的调控能够进行网球的定点球、水平球、垂直球、随机球的发射,解决无人陪练的问题,同时实现网球发射的真实性。储球采用装置满足一次性容纳50个网球满足高强度训练,同时采用左轮式,通过底部电机带动,实现单一通过性,容错率高。收球采用“扫场”模式与摄像头设别模式,可根据网球数量,采用对应的方案,节约时间。因此该装置能够很好的适应各种训练场地,且适用于个人、家庭,具有多种训练模式,用于不同水平的训练者。
29.本发明网球训练服务机器人将发球训练与网球回收集于一体,在满足训练要求的同时,能够进行场地回收网球,减少劳动量,解放劳动力。
30.本发明对主控板进行编程使网球训练服务机器人有两种操作模式,自动模式与蓝牙手柄控制的手动模式。
31.本发明储球装置采用左轮手枪原理,制作左轮转盘,储球量大且具有单一通过性,不卡球,且能够与收球部分进行连接。
32.本发明角度调控的齿轮减速箱与车身底座的麦轮进行配合,实现发射的不同角度。降低了成本。
33.本发明采用摄像头模块,实现对网球的精准识别。
34.第二,把技术方案看作一个整体或者从产品的角度,本发明所要保护的技术方案具备的技术效果和优点,具体描述如下:
35.网球训练服务机器人是集网球训练与网球收集一体,兼顾自动模式与手动模式自由切换的一种多功能机器人。能够满足各种训练场地,且能适用于个人、家庭。具有多种训练模式,能够适用于不同水平的使用者。网球收集功能设有手动模式与自动模式两种,手动模式使用手柄进行操作收集,自动模式适用于场地规则情况下进行,收集模式分为两种模式:一是采用“扫场”,即从一边角起,以s形方式,走完整个场地,收集整个场地的球。二是采用摄像识别网球,实现对网球的收集。
附图说明
36.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
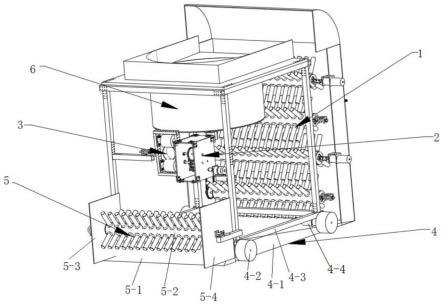
37.图1是本发明实施例提供的自动捡发球的网球服务机器人示意图。
38.图2是本发明实施例提供的上球装置的结构示意图。
39.图3是本发明实施例提供的角度调控装置示意图。
40.图4是本发明实施例提供的网球发射装置示意图。
41.图5是本发明实施例提供的麦克纳姆轮示意图。
42.图6是本发明实施例提供的滚筒刷示意图。
43.图7是本发明实施例提供的储球装置示意图。
44.图8是本发明实施例提供的左轮转盘圆孔示意图。
45.图9是本发明实施例提供的左轮转盘示意图。
46.图中:1、上球装置;1-1、挡板;1-2、链条;1-3、链轮;1-4、编码电机;1-5、胶棒;1-6、
滚筒刷侧壁;1-7、滚筒刷;2、角度调控装置;2-1、第一圆柱齿轮;2-2开槽光轴;2-3、第二圆柱齿轮2-3;啮合;2-4、减速箱左板;2-5、减速箱右板;2-6、第三圆柱齿轮;2-7、直流电机支架;2-8、直流电机;2-9、盘头螺钉;2-10、第四圆柱齿轮;2-11、第五圆柱齿轮;2-12、直角连接片;3、网球发球装置;3-1、铝板;3-2、摩擦轮;3-3、网球发射圆柱齿轮;3-4、m4
×
20螺栓;3-5、右侧网球发射光轴;3-6、连接片;3-7、尼龙垫圈;3-8、左侧网球发射光轴;3-9、u型连接板;3-10、夹轴器;3-11、m4
×
25螺栓;3-12、螺母;3-13、无刷电机;4、行走底盘;4-1、底座;4-2、麦克纳姆轮;4-3、梁;4-4、电机;5、收球装置;5-1、收球倾斜挡板;5-2、收球滚筒刷;5-3、收球左挡板;5-4、收球右挡板;6、储球装置;6-1、左轮转盘;6-2、左轮转盘圆孔;6-3、储球装置顶部;6-4、左轮转盘侧壁;6-5、限位环;6-6、储球直流电机支架;6-7、储球直流电机;6-8、储球联轴器;6-9、弯道导管。
具体实施方式
47.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
48.本发明提供一种自动捡发球的网球服务机器人控制方法包括:控制系统通过spi串口接收到蓝牙手柄的指令后向机械结构发送操作指令所述操作指令,并控制机械结构中的上球装置1的编码电机1-4、角度调控装置2的直流电机2-8、网球发射装置3的无刷电机3-13、行走底盘4的电机4-4、收球装置5的收球直流电机以及储球装置6的储球直流电机6-7发送指令,控制上述所有电机转动,进行自动捡发球的网球服务机器人的上球、发球、收球、行走。
49.在本发明一优选实施例中,所述网球发射装3通过对发球角度的调控进行网球的定点球、水平球、垂直球、随机球的发射。
50.在本发明一优选实施例中,所述收球装置5采用手动模式或自动模式进行网球收集;所述手动模式使用手柄进行操作收集;所述自动模式采用扫场模式,从一边角起,以s形方式,走完整个场地,收集整个场地的球;或采用摄像识别网球,对网球进行收集。
51.在本发明一优选实施例中,所述储球装置6采用左轮式,进行网球单一通过。
52.本发明提供的自动捡发球的网球服务机器人包括控制系统与机械结构。
53.在本发明中,机械结构:整体装置如图1所示,包括:
54.上球装置1:图2所示,20mm胶棒1-5插入滚筒刷侧壁1-6中,保证上球的效率和稳定性,四个滚筒刷1-7通过链轮1-3与链条1-2实现两两连接,编码电机1-4通过联轴器与滚筒刷1-7连接,每个编码电机1-4分别驱动两个滚筒刷1-7,实现四个滚筒刷1-7同方向转动,带动网球从底部向上运动,编码电机1-4安装在挡板1-1上,挡板1-1防止上球过程中网球弹出,实现网球的上球。
55.发球装置,发球装置由角度调控装置2和网球发射装置3组成。
56.其中,角度调控装置2,如图3所示,第一圆柱齿轮2-1与第二圆柱齿轮2-3啮合、第四圆柱齿轮2-10与第五圆柱齿轮2-11啮合,第四圆柱齿轮2-10与第三圆柱齿轮2-6啮合,形成三级减速箱,直流电机2-8通过联轴器与8mm开槽光轴2-2连接,带动第二圆柱齿轮2-6转
动,从而带动其他齿轮转动,形成一个减速箱。
57.减速箱左右分别安装有减速箱左板2-4和减速箱右板2-5;减速箱左板2-4和减速箱右板2-5上部均通过直角连接片2-12与减速箱顶板连接。8mm开槽光轴2-2通过m3
×
4盘头螺钉2-9分别固定在减速箱左板2-4和减速箱右板2-5上;直流电机2-8安装在直流电机支架2-7上。
58.网球发射装置3:如图4所示,网球经储球装置(如图7)的弯道导管6-9,进入网球发射装置3,对转双轮采用摩擦轮3-2,通过无刷电机3-13高速旋转,挤压网球,获得动力。且另一侧可通过网球发射圆柱齿轮3-3、右侧网球发射光轴(8mm开槽)3-5与图3中第一圆柱齿轮2-1进行啮合使网球发射装置3与角度调控装置2形成的减速箱进行连接,另一侧通过的左侧网球发射光轴(8mm开槽)3-8通过、u型连接板3-9与机械结构的梁柱连接,使得网球发射装置3能够进行发球角度调控,实现精准发球。
59.网球发射装置3还包括网球发射壳体;网球发射壳体顶部为6061铝板(11排孔)3-1;m4
×
20螺栓3-4将夹轴器3-10夹持在网球发射光轴(8mm)3-8上。
60.无刷电机3-13通过连接片3-6、尼龙垫圈3-7、m4
×
25螺栓3-11、螺母3-12固定在网球发射壳体内部。
61.行走底盘4,如图1所示,包括:底座4-1、麦克纳姆轮4-2(如图5所示)、方梁4-3、电机4-4。
62.底座4-1结构形状的设计选择为四边形通过铝材质的方梁4-3与螺丝的固定,采用倾斜式。相邻的方梁4-3均选用双支点固定的方式固定,底部轮子选用能够进行横移的麦克纳姆轮4-2,四个麦克纳姆轮4-2与分别由电机4-4驱动。
63.收球装置5,如图1所示,包括:收球倾斜挡板5-1、收球滚筒刷5-2、收球左挡板5-3、收球右挡板5-4。
64.如图6所示,收球滚筒刷5-2采用星型轮设计,20mm胶棒5-2-6插入收球滚筒刷侧壁5-2-7中,收球直流电机5-2-3通过6x8的收球联轴器5-2-5和m4x20的收球螺栓5-2-1与收球滚筒刷5-2连结。
65.收球直流电机5-2-3电机转动经收球倾斜挡板5-1将网球拨入底座4-1,收球左挡板5-3、收球右挡板5-4防止网球从两侧漏出,实现收球。
66.其中,收球联轴器5-2-5通过m3x4的盘头螺丝5-2-2将收球直流电机5-2-3与8mm的收球光轴5-2-9连接。收球光轴5-2-9通过收球u型连接板5-2-8连接在外部纵梁上。所述纵梁焊接在机械结构的框架上。
67.储球装置6,如图7、图8、图9所示,由图2的滚筒刷1-7将网球由底部4-1(图1)把带到储球装置顶部6-3进入左轮转盘6-1(如图8)内部,为保障网球无误滚落到左轮转盘6-1边缘,即左轮转盘侧壁6-4;左轮转盘侧壁6-4下部安装有限位环6-5;左轮转盘6-1中部凸起,为满足网球“排队”,如图9所示,左轮转盘6-1上层开有12个左轮转盘圆孔6-2,通过图8所示的储球直流电机6-7通过6
×
8的储球联轴器6-8带动左轮转盘6-1转动,使得网球依次“排队”从图8的左轮转盘圆孔6-2进入弯道导管6-9。储球直流电机6-7安装在储球直流电机支架6-6。
68.控制系统:通过spi串口接收到蓝牙手柄的指令后向机械结构发送操作指令所述操作指令包括自动模式和蓝牙手柄控制的手动模式。通过按键设置机器人为自动模式与蓝
牙模式。蓝牙模式:通过按键设置蓝牙模式之后,控制系统(cpu)通过spi串口接收到蓝牙手柄数据,控制系统(cpu)处理完数据之后向上球装置1的编码电机1-4、角度调控装置2的直流电机2-8、网球发射装置3的无刷电机3-13、行走底盘4的电机4-4、收球装置5的收球直流电机以及储球装置6的储球直流电机6-7发送指令,控制上述所有电机进行相应的转动,实现上球、发球、收球、行走。
69.本发明提供的网球训练服务机器人是集网球训练与网球收集一体,兼顾自动模式与手动模式自由切换的一种多功能机器人。能够满足各种训练场地,且能适用于个人、家庭。具有多种训练模式,能够适用于不同水平的使用者。网球收集功能设有手动模式与自动模式两种,手动模式使用手柄进行操作收集,自动模式适用于场地规则情况下进行,收集模式分为两种模式:一是采用“扫场”,即从一边角起,以s形方式,走完整个场地,收集整个场地的球。二是采用摄像识别网球,实现对网球的收集。
70.目前市场上现有的机器人存在以下问题,价格偏高,不适于普通家庭以及学校的大量入购,且没有回收球的功能,在高强度的运动之后,球的回收问题无法解决;消耗功率过大,很难采用电池供电,同时压缩空气的同时,会产生很大的噪音;无法收球。而本装置兼顾发球与收球,价格低适用于各种场合的使用,采用高速旋转的电机压缩网球的发球方式,噪音小,且功率消耗低。
71.以上所述,仅为本发明较优的具体的实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1