人机交互式上肢康复训练设备的制作方法
1.本发明涉及肢体康复领域,尤其涉及一种人机交互式上肢康复训练设备。
背景技术:
2.上肢康复机器人可以辅助老年人和运动功能障碍患者进行康复训练,防止肌肉萎缩,恢复患者手臂运动能力。桌面式康复机器人是一种可以通过手托并联在人的上肢上,为人的肢体运动提供额外的动力,辅助患者完成上肢在水平面内的移动、回转等康复训练任务,运动机能恢复的智能机械系统。
3.现有的上肢康复训练设备还存在诸多不足,例如:
4.ep3122305b1公开了一种肢康复,监测和/或评估交互装置,包括第一引导机构、基本上平行于第一引导机构的第二引导机构,基本上垂直于第一和第二引导机构的第三引导机构和端部执行器,其中第三引导机构连接到第一和第二引导机构,并且其中端部执行器连接到第三引导机构。该装置第一引导机构带动第三引导机构沿第一引导机构和第二引导机构移动,此过程中第三引导机构和第二引导机构之间力的作用于第三引导机构和第一引导机构之间力的作用不平衡,设备移动平稳度有待提高,且设备易损坏,此外该装置的上肢支撑机构不能根据人手臂的长度灵活调整,不能自转,使用过程存在不便。
5.cn113058227a公开了一种上肢康复训练仪,包括第一导轨、第二导轨和无动力滑轨,其中第一导轨沿x方向布置,第二导轨沿y方向布置,第一导轨的轨道一端位于第二导轨的滑块上,且第一导轨的轨道另一端位于无动力滑轨上,第一导轨的滑块上设有握把和腕托,握把上设有力量传感器,力量传感器的检测信号输出端与主控制器相连,该技术存在与上述技术类似的不足。
技术实现要素:
6.本发明旨在解决上肢康复设备中导向机构的平稳度、同步度不足等问题。为此,本技术提供了一种人机交互式上肢康复训练设备,其特征在于,包括:
7.第一导向机构,所述第一导向机构至少包括相互平行的二第一导轨,所述第一导轨上设有第一滑块;
8.第一驱动机构,所述第一驱动机构驱动连接于所述第一导向机构中一所述第一导轨上的所述第一滑块;
9.联动机构,所述联动机构连接于所述第一驱动机构和所述第一导向机构中的至少另一所述第一导轨上的所述第一滑块;
10.第一基座,所述第一导向机构、所述第一驱动机构和所述联动机构设于所述第一基座上;
11.第二导向机构,所述第二导向机构至少包括一第二导轨,所述第二导轨上设有第二滑块;
12.上肢支撑机构,所述上肢支撑机构设于所述第二滑块上
13.第二驱动机构,所述第二驱动机构驱动连接于所述上肢支撑机构或所述第二滑块;以及
14.第二基座,所述第二导向机构和所述第二驱动机构设于所述第二基座上,所述第二基座连接于至少相互平行的二所述第一导轨的所述第一滑块。
15.采取以上技术方案的有益效果为:
16.本技术通过联动机构将第一驱动机构一拖二两个第一滑块,使得上肢支撑机构在两个第一导轨方向上的运动绝对同步无误差,并且通过第一基座和第二基座使得导向机构和驱动机构作为整体进行运动,在运动过程中更加的平稳,不易损坏,且第一导向机构只有一个动力输出就是第一驱动机构,使得整体的成本也相对可控一些。
17.较佳的,所述第一驱动机构包括第一驱动电机、第一主动轮、第一主动轮安装架、第一从动轮、第一从动轮安装架和第一传动带;所述第一主动轮安装于所述第一主动轮安装架上,所述第一从动轮安装于所述第一从动轮安装架上,所述第一传动带被张紧设置在第一主动轮和第一从动轮上,所述第一滑块与所述第一传动带连接。
18.较佳的,所述联动机构包括联动轴、二第一联动轮、二第一联动轮安装架和第一联动带;二所述第一联动轮分别安装于二所述第一联动轮安装架上,所述第一联动带被张紧设置在二第一联动轮上,至少另一所述第一导轨上的所述第一滑块与所述第一联动带连接;所述联动轴连接所述第一从动轮和其中一所述第一联动轮,或所述联动轴连接所述第一主动轮和其中一所述第一联动轮。
19.较佳的,所述第二驱动机构包括第二驱动电机、第二主动轮、第二主动轮安装架、第二从动轮、第二从动轮安装架和第二传动带;所述第二主动轮安装于所述第二主动轮安装架上,所述第二从动轮安装于所述第二从动轮安装架上,所述第二传动带被张紧设置在第二主动轮和第二从动轮上,所述第二滑块设于所述第二传动带上。
20.较佳的,所述上肢支撑机构包括手部握持组件和所述手臂支撑组件。
21.较佳的,所述手部握持组件包括安装座、力传感器和握持把手,所述握持把手通过所述力传感器安装于所述安装座。
22.较佳的,所述手臂支撑组件包括手臂支托件和伸缩调节件,所述手臂支托件通过所述伸缩调节件安装于所述安装座。
23.较佳的,所述手部握持组件还包括第一轴承,所述第一轴承设于所述安装座,所述力传感器穿过所述第一轴承的内圈安装于所述安装座底部。
24.较佳的,所述安装座包括轴承底座和轴承盖板,所述第一轴承安装于所述轴承底座内,所述轴承盖板和所述轴承底座分别连接于所述第一轴承的内圈和外圈,所述力传感器安装于所述轴承底座,所述握持把手穿设于所述轴承盖板连接于所述力传感器。
25.较佳的,所述握持把手包括把手套壳、第二轴承、第三轴承和连接杆,所述第二轴承和所述第三轴承分别设于所述连接杆的两端,所述把手套壳套设于连接杆并与所述第二轴承和第三轴承的外圈连接;所述连接杆的底部连接所述力传感器。
26.较佳的,所述把手套壳上设有第一限位穿孔,所述连接杆上设有位置对应的第二限位孔,所述第一限位穿孔和所述第二限位孔通过限位插件固定限位。
27.较佳的,所述伸缩调节件包括安装插槽和延伸安装段;所述延伸安装段沿着延伸方向设有调节凹槽,所述延伸安装段插设于所述安装插槽并于所述安装插槽的相对位置伸
缩可调,所述安装插槽上位置对应所述调节凹槽处设有螺纹孔,所述螺纹孔内设有拧紧螺栓可抵紧于所述调节凹槽。
28.较佳的,还包括控制系统,所述控制系统通信控制于所述第一驱动机构和所述第二驱动机构。
29.较佳的,还包括控制系统,所述控制系统通信控制于所述第一驱动机构、所述第二驱动机构和力传感器。
30.较佳的,还包括底座和升降调节机构,所述升降调节机构设于所述底座上,所述第一基座设于所述升降调节机构上。
附图说明
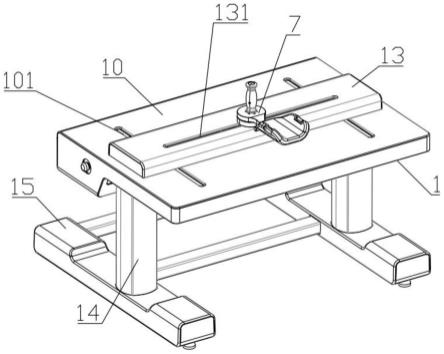
31.图1表达了本发明的总体结构示意图。
32.图2表达了本发明去掉第一罩体和第二罩体后的结构示意图。
33.图3表达了本发明第一导向机构和第一驱动机构连接关系示意图。
34.图4表达了本发明第二导向机构安装在第二基座和第二罩体内的结构示意图。
35.图5表达了本发明第二导向机构和第二驱动机构结构示意图。
36.图6表达了本发明上肢支撑机构与第二连接组件的结构示意图。
37.图7表达了本发明上肢支撑机构的结构爆炸示意图。
38.图8表达了本发明上肢支撑机构的另一角度结构爆炸示意图。
39.其中:1第一基座;10第一罩体;101第一导向槽孔;11第二连接组件;111第二连接板;112第二皮带压块;12压线块;13第二罩体;131第二导向槽孔;14升降调节机构;15底座;2第一导向机构;21第一主动轮安装架;22第一主动轮;23第一从动轮安装架;24第一从动轮;25第一传动带;26第一导轨;27第一滑块;28转轴;29联轴器;291第一联动带;292第一联动轮安装架;293第一联动轮;3第一驱动机构;4第二基座;5第二导向机构;53第二主动轮安装架;54第二主动轮;51第二从动轮安装架;52第二从动轮;55第二传动带;56第二导轨;57第二滑块;6第二驱动电机;7上肢支撑机构;71手臂支撑组件;711手臂支托件;712安装插槽;713条形槽;714拧紧螺栓;715绑带安装柱;72手部握持组件;721轴承底座;722第一轴承;723握持把手;7231把手套壳;7232第二轴承;7233第三轴承;7234连接杆;7235第二限位孔;7236第一限位穿孔;724轴承盖板;725延伸安装段;726限位杆;727弧形限位槽;728出线槽;8力传感器;9第一连接组件;91第一连接板;92中间板;93第一皮带压块。
具体实施方式
40.以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
41.本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
42.请参阅图1~图3,本发明首先提供了一种人机交互式上肢康复训练设备,包括第一导向机构2、第二导向机构5、第一驱动机构3、第二驱动机构、联动机构、上肢支撑机构7、第一基座1和第二基座4;在上肢康复训练设备中主要是二维自由度的组合运动,以x轴向和y轴向为参照继续描述的话,上肢支撑机构7被复合设置在x轴向第二导向机构5和y轴向的第一导向机构2;第一导向机构2和第二导向机构5的运动相复合则能使上肢支撑机构7在x轴向和y轴向的坐标系内作任意轨迹的运动,进而辅助上肢进行康复训练。
43.进一步的,请结合图2、图3和图5,所述第一导向机构2至少包括二第一导轨26和二第一滑块27,二所述第一导轨26相互平行,二所述第一滑块27对应设于所述二所述第一导轨26上;所述第二导向机构5至少包括一第二导轨56和一第二滑块57,所述第二导轨56通过二所述第一滑块27连接于二所述第一导轨26上。具体的,所述第二导向机构5和所述第二驱动机构设于所述第二基座4上,所述第二基座4连接于至少相互平行的二所述第一导轨26的所述第一滑块27,从而实现第二导向机构5和第二驱动机构作为一个整体于所述第一导向机构2上运动。
44.请结合图3和图5,所述第一驱动机构3驱动连接于二所述第一滑块27的其中一个;所述联动机构联动于所述第一驱动机构3和至少另一个所述第一滑块27;所述上肢支撑机构7设于所述第二滑块57上;所述第二驱动机构驱动连接于所述上肢支撑机构7或者所述第二滑块57。具体的,所述第一导向机构2、所述第一驱动机构3和所述联动机构设于所述第一基座1上,作为一个安装基础也方便安装进行安装,大大提升了设于第一导向机构2上的上肢支撑机构7的运动平稳度。
45.请参阅图3,本技术通过联动机构将第一驱动机构3一拖二两个第一滑块27,使得上肢支撑机构7(第二基座4)在两个第一导轨26方向上的运动绝对同步无误差,在运动过程中更加的平稳,不易损坏,且第一导向机构2只有一个动力输出就是第一驱动机构3,使得整体的成本也相对可控一些。
46.第一导向机构2旨在于为第二导向机构5和上肢支撑机构7提供第一方向(y轴向)的引导和支撑,其第一导轨26的数量也可以为一,但是在实际应用中,第一导轨26的数量为二是最佳方案。进一步的,第一导轨26的数量也可以大于二,只是每个第一导轨26上至少应具有一第一滑块27,方便第二基座4的安装连接。第一驱动机构驱动其中一个第一导轨26上的第一滑块27,而联动机构则联动其他第一导轨26上的第一滑块27。
47.请结合图4和图5,第二导向机构5旨在于为上肢支撑机构7提供第二方向(x轴向)的引导和支撑,由于上肢支撑机构7本身只需要在第二导向机构5上运动,所以第二导向机构5的第二导轨56和第二滑块57的数量至少为一即可。进一步的,第二导轨56和第二滑块57的数量也可以大于一,即双轨道、三轨道或多轨道等。
48.请参阅图3,第一驱动机构3旨在于提供第一方向上驱动的动力输出,所述第一驱动机构3包括第一驱动电机、第一主动轮22、第一主动轮安装架21、第一从动轮24、第一从动轮安装架23和第一传动带25;所述第一主动轮22安装于所述第一主动轮安装架21上,所述第一从动轮24安装于所述第一从动轮安装架23上,所述第一传动带25被张紧设置在第一主动轮22和第一从动轮24上,所述第一滑块27或者第一基座1连接于所述第一传动带25。由上所述,第一滑块27的数量为二或者多,则只需其中一个第一滑块27连接于第一传动带25上形成主动滑动,其他的第二滑块57通过联动机构来实现同步滑动。优选的,本实施例中是第
一基座1的底部设有第一连接组件9用来与第一传动带25进行连接。
49.请参阅图1和图3,为了对第一导向机构2、第一驱动机构3和联动机构等进行保护,将第一导向机构2和第一驱动机构3都设于第一基座1上,第一基座1上设置第一罩体10保护第一导向机构2和第一驱动机构3,而第一罩体10上设置第一导向槽孔101方便第二基座4与第一导轨26之间的安装,具体的,第一导向槽孔101的数量对应与第一导轨26的数量,且位置也一一对应。
50.较佳的,请参阅图3,所述联动机构包括联动轴、二第一联动轮293、二第一联动轮安装架292和第一联动带291;二所述第一联动轮293分别安装于二所述第一联动轮安装架292上,所述第第一联动带291被张紧设置在二第一联动轮293上,所述第一滑块27连接于所述第一联动带291,所述联动轴连接所述第一从动轮24和其中一所述第一联动轮293。具体的,因第一滑块27的数量为二或者多,所以当第一传动带25主动带动其中一个第一滑块27时,另外的第一滑块27被联动机构带动。其带动方式是通过第一联动带291完成的。则第一滑块27的数量决定了联动机构的数量,当第一滑块27的数量为n时,则联动机构的数量为n-1;其可以灵活变动的是联动轴可以选用一根通长的轴串联每一联动机构中的其中一第一联动轮即可。优选的,联动轴包括转轴28和联轴器29,联动轴通过联轴器29与第一从动轮24连接。
51.请结合图1、图4和图5,第二驱动机构旨在于提供上肢支撑机构7第二方向的动力输出,所述第二驱动机构包括第二驱动电机6、第二主动轮54、第二主动轮安装架53、第二从动轮52、第二从动轮安装架51和第二传动带55;所述第二主动轮54安装于所述第二主动轮安装架53上,所述第二从动轮52安装于所述第二从动轮安装架51上,所述第二传动带55被张紧设置在第二主动轮54和第二从动轮52上,所述第二滑块57设于所述第二传动带55上。
52.由上所述,上肢支撑机构7由直接连接第二导向机构5提供第二方向上的运动,间接连接第一导向机构2提供第一方向上的运动。从而实现在第一方向和第二方向所形成的坐标系内的任意轨迹运动。
53.请参阅图1和图4,为了对第二导向机构5和第二驱动机构进行保护,将第二导向机构5和第二驱动机构都设于第二基座4上,第二基座4上设置第二罩体13保护第二导向机构5和第二驱动机构,而第二罩体13上设置第二导向槽孔131方便第二引导机构与上肢支撑机构7的安装。
54.如上所述,第二基座4的底部设有第一连接组件9用于与第一导轨26进行连接,第一连接组件9包括第一连接板91、中间板92和第一皮带压块93;具体的第一滑块27连接于中间板92,第一连接板91为二,分别位于中间板92的两端设置用来连接第一传动带25,第一连接板91上设有第一皮带压块93,第一传动带25的两端连接于两个第一连接板91的第一皮带压块93上后被张紧。
55.上肢支撑机构7是辅助操作者残障上肢进行康复运动的,其与操作者上肢的配合程度决定了操作者的使用体验和康复效率。因此,所述上肢支撑机构7包括手部握持组件72和所述手臂支撑组件71。手部握持组件72可以进行自轴灵活转动,配合操作者在康复运动中的腕部活动;手臂支撑组件71具有伸缩调节功能,可以适配不同臂长的适用人群。
56.具体的,请参阅图5、图6、图7和图8,所述手部握持组件72包括安装座、力传感器8和握持把手723,所述握持把手723通过所述力传感器8安装于所述安装座。优选的,力传感
器8为多维力传感器8,可以收集操作者对握持把手723的施力大小和方向。
57.为提高握持把手723的转向灵活度,所述手部握持组件72还包括第一轴承722,所述第一轴承722设于所述安装座,所述力传感器8穿过所述第一轴承722的内圈安装于所述安装座底部。进一步的,所述安装座包括轴承底座721和轴承盖板724,所述第一轴承722安装于所述轴承底座721内,所述轴承盖板724和所述轴承底座721分别连接于所述第一轴承722的内圈和外圈,所述握持把手723穿设于所述轴承盖板724连接于所述力传感器8。优选的,力传感器8安装于所述轴承底座721。
58.第一轴承722和力传感器8都被安装在安装座内保护避免受损。轴承盖板724连接于第一轴承722的内圈,轴承底座721连接于第一轴承722的外圈,二者因第一轴承722的内圈和外圈的结构形式而相互形成安装;或者轴承盖板724连接于第一轴承722的外圈,轴承底座721连接于第一轴承722的内圈也可。较佳的,请结合参阅图7和图8,为了对轴承盖板724和所述轴承底座721的相互转动起到一个限位作用,防止过度转动或扭伤腕部,设置限位杆726和弧形限位槽727的组合结构,其中,将限位杆726设于轴承盖板724上,弧形限位槽727设于轴承底座721上,弧形限位槽727的弧度是限制距离,轴承盖板724和所述轴承底座721的相互转动位移超过这一距离则被限制。
59.请结合图7和图8,为进一步提高握持把手723的转向灵活度,所述握持把手723包括把手套壳7231、第二轴承7232、第三轴承7233和连接杆7234,所述第二轴承7232和所述第三轴承7233分别设于所述连接杆7234的两端,所述把手套壳7231套设于连接杆7234并与所述第二轴承7232和第三轴承7233的外圈连接;所述连接杆7234的底部连接所述力传感器8。
60.请参阅图8,如上所述,第一轴承722与第二轴承7232、第三轴承7233一起起到了握持把手723的二级自转功能,为了将二者适用性调控,所述把手套壳7231上设有第一限位穿孔7236,所述连接杆7234上设有位置对应的第二限位孔7235,所述第一限位穿孔7236和所述第二限位孔7235通过限位插件固定限位。可以通过限位插件来实现把手套壳7231的限制,从而对握持把手723的自转灵活度做一个调节,也方便适应操作者腕部恢复程度的腕部运动阻尼。
61.请参阅图6和图8,安装座的底部通过第二连接组件11与第二滑块57和第二传动带55连接,第二连接组件11包括第二连接板111和第二皮带压块112;第二滑块57安装在第二连接板111上,第二传动带55则连接于第二皮带压块112。进一步的安装座底部还设有对力传感器8整线的出线槽728和压线块12,方便力传感器8排线。
62.请参阅图6,为了适应不同臂长的操作者人群,所述手臂支撑组件71包括手臂支托件711和伸缩调节件,所述手臂支托件711通过所述伸缩调节件安装于所述安装座。手臂支托件711上设有绑带安装柱715方便对操作者的手部进行辅助固定。
63.进一步的,请参阅图6、图7和图8,所述伸缩调节件包括安装插槽712和延伸安装段725;所述延伸安装段725沿着延伸方向设有调节凹槽,所述延伸安装段725插设于所述安装插槽712并于所述安装插槽712的相对位置伸缩可调,所述安装插槽712上位置对应所述调节凹槽处设有螺纹孔,所述螺纹孔内设有拧紧螺栓714可抵紧于所述调节凹槽。通过调节延伸安装段725和安装插槽712的相对位置来实现长度调节,调节完成后通过拧紧螺栓714进行锁止。具体的,安装插槽712具有一条形槽713,延伸安装段725是插设于条形槽713中作相对位置调整。
64.当设备需要继续智能式人机交互时,还包括控制系统,所述控制系统通信控制于所述第一驱动机构3、所述第二驱动机构和力传感器8;或者所述控制系统通信控制于所述第一驱动机构3、所述第二驱动机构,无需对力进行采集。由上可知,控制系统主要控制第一驱动机构3的第一驱动电机,第二驱动机构的第二驱动电机6和力传感器8。具体的,当操作者对握持把手723施力的时候,力传感器8采集到施力的大小,由此判断操作者的上肢受损程度,采集到施力的方向由此判断操作者的上肢运动意图;具体可实现以下几种功能:
65.辅助模式:操作者手臂通过手臂支撑组件进行支撑,手握手部握持组件72,力传感器8采集操作者对握持把手723的作用力大小和方向并将采集到的数据传递给控制系统,控制系统控制根据操作者力量大小和方向来进行第一导向机构2和第二导向机构5轨迹复合确定方向,从而辅助操作者的上肢进行直行或/和旋转动作;其原理是:控制系统与第一驱动电机、第二驱动电机6和力传感器8通信相连,当力传感器8采集到握持把手723受到的手部推力,即操作者想推动握持把手723进行康复而手部力量不足时,但力传感器8已经采集到了手部的推力大小和方向反馈给控制系统,控制系统鉴别其力量大小没有达到康复标准需要进行辅助代偿,则控制第一驱动电机和第二驱动电机6的运转速度,进而控制第一导向机构2和第二导向机构5轨迹运动复合来辅助上肢支撑机构7的方向用力,起到辅助作用;控制系统内部程序算法是实时计算的,基本底层是计算机领域的现有技术,此处不对底层算法作多余赘述。比如操作者想斜向运动施力,则手部握持把手723施加一个斜向的力,力传感器8采集到力的大小和方向之后,控制系统开始计算代偿作用,将斜向的轨迹分散为第一导向机构2和第二导向机构5的单项轨迹,从而实现轨迹运动。
66.引导模式:操作者手臂通过手臂支撑组件进行支撑,手握手部握持组件72,控制系统按照预设程序控制第一驱动机构3或/和第二驱动机构,使得第一引导机构或/和第二引导机构按照预设的轨迹移动,带动操作者动作;此时力传感器8采集到的力的大小没有达到辅助功能标准,或者没有力传感器8采集,则控制系统全面接引康复轨迹运动,在控制系统内进行轨迹程序的预设,包括轨迹和上肢支撑机构7的速度等,操作者手部轻轻握持住握持把手723跟随上肢执行机构进行康复运动。
67.被动模式(也称操作者主动康复模式):此模式适合操作者康复效果较好或者手臂受损不严重,操作者手臂通过手臂支撑组件进行支撑,手握手部握持组件72,仅靠操作者自己施加力产生动作,此时适合操作者手部康复效果较好,或者手部受损较轻的情况;进一步的,还可以在第一驱动电机和第二驱动电机6上设置电学阻尼装置,可以控制操作者推动上肢执行机构时所需力的大小。
68.基于产品的结构,还能够开发出其他使用模式,不仅限于上述的使用模式。
69.进一步的,为了能够适应操作者的人群高度的不同,设置升降调节机构14,将第一导向机构2、第二导向机构5、第一驱动机构3、第二驱动机构等上肢支撑机构7等都设于升降调节上。本设备还包括底座15,升降调节机构14设于底座15上。优选的,第一基座1设于升降调节机构14上,升降调节机构安装于底座15上。
70.本技术的有益效果为:
71.第一驱动机构一拖二驱动两个第一导轨的导向运动,第二导向机构安装在第二基座上,第二基座整体与至少两个第一导向机构连接,使得安装在第二导向机构上的上肢支撑机构在运动过程中移动更平稳,设备不易损坏;而且两个第一导轨的运动通过联动机构
进行同步,其同步度和稳定度更高。
72.本领域的技术人员应理解,上述描述所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1