一种全自由度运动虚拟现实装置
1.本发明属于虚拟现实技术领域,具体涉及一种全自由度运动虚拟现实装置。
背景技术:
2.虚拟现实技术是一种可以创建和体验虚拟世界的计算机仿真系统,它利用计算机生成一种模拟环境,是一种多源信息融合的、交互式的三维动态视景和实体行为的系统仿真使用户沉浸到该环境中。虚拟现实技术vr主要包括模拟环境、感知、自然技能、传感设备、运动光学检测等方面。模拟环境是由计算机生成的、实时动态的三维立体逼真图像。自然技能是指人的头部转动,眼睛、手势、或其他人体行为动作,由计算机来处理与参与者的动作相适应的数据,并对用户的输入作出实时响应,并分别反馈到用户的五官。传感设备是指三维交互设备。运动光学检测是在运动过程中对运动目标的光学数据检测,通常是划定一个合适的空间范围,在空间的角落处或其他合适地方旋转传感器,以此实现运动者在空间范围内的运动检测。
3.目前,在虚拟现实技术领域中,通常采用硬平台与刚性束腰组件作为运动者的运动空间。如公开号为cn206560684u的文献就公开了一种基于虚拟现实的万向行走器装置,其包括运动光学检测装置和配套的行走模块,运动光学检测装置包括底架、支架、吊杆、用户固定部件、光学发射接收装置、运动底盘,运动底盘通过地脚螺栓或吸盘固定在地面上,运动底盘后侧面连接底架,底架顶部套接支架,支架上部顶端弯曲通过吊杆连接部件连接吊杆连接头,吊杆连接头下部铰接吊杆,吊杆末端通过刚性连接部连接用户固定部件;所述运动底盘包括弧形的运动底盘边缘部分和平面的运动底盘中心部分;该技术通过吊杆和用户固定部件可对运动者起到约束作用,使运动者可以在运动底盘上安全地进行走、跑运动。但该技术在应用时仍然存在如下技术问题:首先,由于运动底盘为刚性的静平台,吊杆也为刚性结构,因此在腰部被刚性结构束缚和有限面积限制的情况下,该装置仅适合原地摆腿模拟走、跑动作,且其运动姿态同自然走、跑也有很大差异,长时间运动将会出现较为强度的不适感。又由于刚性结构限制了运动者躯体活动的范围或幅度,因此运动者也不能或不能大幅度做z向运动(竖直方向)。
4.其次,受限于刚性结构的束缚,运动者只能平稳旋转,但不能突然朝某前、后、左、右的任意方向跳跃,这也抑制了运动者躯体活动的突然性。
5.另外,现有技术中还公开有蹦极跳床式的运动装置,即运动者可通过弹性拉绳在跳床上进行跳跃,以体验蹦极的感觉。但由于弹性拉绳是固定不动的,在实际体验中运动者也只能在上下方向进行跳跃动作,其不能实现360度的转体运动,因而其活动范围较窄,对运动者的限制也较大。
6.为此,有必要研发便于运动者在平台上进行全自由度运动的新技术以解决上述技术问题。
技术实现要素:
7.本发明的目的在于克服现有技术中存在的上述技术问题,提供了一种全自由度运动虚拟现实装置,该装置减小了运动者的束缚,为运动者提供了更大的活动范围和幅度,能够让运动者以更轻松的姿态进行全自由度运动,进而将其应用于虚拟现实领域时,能够让运动者获得更好的虚拟现实体验。
8.为实现上述目的,本发明采用的技术方案如下:一种全自由度运动虚拟现实装置,其特征在于:包括防护架、弹性运动平台、支撑导向架、转盘、弹性皮筋和柔性束腰件,防护架包括多根立柱,弹性运动平台包括弹床、拉力簧和框架,弹床通过多根拉力簧固定在框架内,框架通过立柱固定在防护架的下部;支撑导向架均匀固定在防护架的上部,支撑导向架上固定有滑动组件,转盘通过滑动组件安装在支撑导向架上,且转盘可通过滑动组件在支撑导向架上转动;弹性皮筋对称固定在转盘上,柔性束腰件通过弹性皮筋设置在弹性运动平台的上方;运动者通过柔性束腰件、弹性皮筋和转盘可在弹性运动平台上进行全自由度运动。
9.所述全自由度运动包括但不限于任意方向的跳跃运动和360度的转体运动。
10.所述转盘的外环侧垂直固定有限位挡环。
11.所述支撑导向架具有用于固定滑动组件的凹槽。
12.所述滑动组件包括通过销轴固定在凹槽上部的球面限位轴承和通过销轴固定在凹槽下部的球面支撑轴承,转盘安装在球面支撑轴承与球面限位轴承之间,限位挡环位于球面支撑轴承与球面限位轴承之间的外侧。
13.所述球面限位轴承位于球面支撑轴承的侧上方,且球面支撑轴承相较于球面限位轴承更靠近转盘中心。
14.所述支撑导向架采用槽钢制成,转盘采用铝合金制成。
15.所述立柱的数量为4-12根,滑动组件的数量为8-16组。
16.所述转盘上固定有对称的拉力调节器,弹性皮筋分别连接在拉力调节器上。
17.采用上述技术方案,本发明的有益技术效果是:1、本发明通过弹性皮筋将柔性束腰件安装在可在支撑导向架上转动的转盘上,在运动者使用时有效地减小了运动者的束缚。同时,弹床的面积有多大,运动者的活动范围就有多大,这也为运动者提供了更大的活动范围和幅度,能够让运动者以更轻松的姿态进行全自由度运动,进而将其应用于虚拟现实领域时,能够让运动者获得更好的虚拟现实体验。
18.进一步的,本发明不仅使得运动者除了在x、y两个方向自由运动外,还可进行随意跳跃、旋转运动,即运动者可朝前、后、左、右、上、下的任意方向跳跃以及可以实现旋转角度不受限制的或顺时针或逆时针360度的转体运动。再通过与弹性运动平台相结合,还能够减少运动者对地面的正压力并降低行走、跑动、跳跃时的地面摩擦力,进而获得比自然状态下更加轻松运动姿态,且运动者也可以随意向各个方向突然跳跃和下蹲,使得运动的幅度和即时性可以更大更快。
19.2、本发明通过限位挡环能够防止转盘运行时与支撑导向架脱离,有效地提升了转盘在支撑导向架上的稳定性及使用安全性。
20.3、本发明通过支撑导向架的凹槽固定滑动组件,一是有利于装置的重心更加稳定,二是能够隐藏滑动组件,避免滑动组件暴露在外而碰撞损坏。
21.4、本发明主要通过球面支撑轴承和球面限位轴承作为滑动组件,一是具有结构简单、便于生产、成本较低的优点,二是有利于提高转盘在支撑导向架上灵活的转动性能。
22.5、本发明将球面限位轴承设置在球面支撑轴承外侧的侧上方,这使得球面限位轴承更加接近限位挡环,作用是抑制转盘运行时有可能产生的水平漂移,发挥其限位功能,使其旋转时始终保持在圆心上。
23.6、本发明采用槽钢制备支撑导向架,其优点在于能够保证装置的稳固性;采用铝合金制备转盘,其优点在于追求装置具有更轻的重量,有利于轻便运行。
24.7、本发明中立柱的数量可为4-12根,滑动组件的数量可为8-16组,其优点在于便于制备出不同规格型号的装置,进而满足不同的市场需求。
25.8、本发明通过拉力调节器能够对运动者运动时弹性皮筋的长度进行调节,若弹性皮筋过长则易牵绊运动者,此时拉力调节器适时将过长的弹性皮筋收入“囊中”;反之,若弹性皮筋过短则张力过大,影响运动者动作发挥,此时拉力调节器适时释放长度,以达到弹性皮筋始终处于合理的最佳长度和适度的弹性力度,进而让运动者获得最佳的运动体感。
26.9、本发明不仅可用于运动类虚拟现实游戏,还可以用于运动康复训练,让运动康复不再枯燥无味。
附图说明
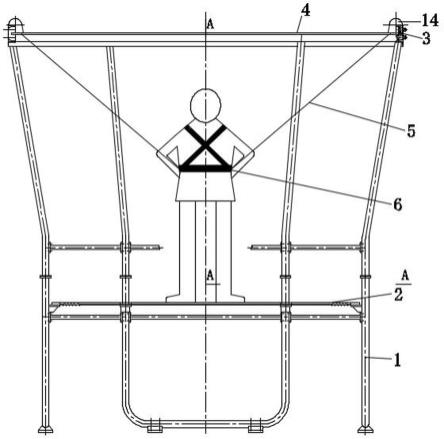
27.图1为本发明的整体结构示意图。
28.图2为图1中的a-a剖视结构示意图。
29.图3为本发明的全景立体结构示意图。
30.图4为转盘通过滑动组件安装在支撑导向架上的结构示意图。
31.图5为图4的俯视结构示意图。
32.图6为图4中i处的放大结构示意图。
33.图中标记为:1、防护架,2、弹性运动平台,3、支撑导向架,4、转盘,5、弹性皮筋,6、柔性束腰件,7、弹床,8、拉力簧,9、框架,10、滑动组件,11、限位挡环,12、球面限位轴承,13、球面支撑轴承,14、拉力调节器。
具体实施方式
34.实施例1作为本发明的一基本实施方式,本实施例提供了一种全自由度运动虚拟现实装置,该虚拟现实装置主体结构类似现有常规的蹦极跳床结构,如图1-5所示,其包括防护架1、弹性运动平台2、支撑导向架3、转盘4、弹性皮筋5和柔性束腰件6,其中,防护架1包括多根立柱,并优选多根立柱呈圆形均匀固定。立柱的数量可设置为4-12根,但也可根据需要相应增加或减少,以满足不同的市场需求。
35.弹性运动平台2可采用现有常规的跳床结构,其结构可包括弹床7、拉力簧8和框架9,拉力簧8的数量为多根,弹床7通过多根均匀布置的拉力簧8固定在框架9内,框架9通过立柱固定在防护架1的中部或下部或中下部。需要说明的是,框架9和弹床7的形状基本相同,两者可同时为圆形或椭圆形。
36.支撑导向架3的数量为多段,多段支撑导向架3均匀固定在防护架1的上部并呈圆
形布置,每段支撑导向架3上固定有滑动组件10。其中,支撑导向架3优选采用槽钢制成,槽钢的槽体可作为凹槽用于安装滑动组件10。滑动组件10的总体数量可设置为8-16组,但也可根据需要相应增加或减少,以满足不同的市场需求。
37.转盘4通过多组滑动组件10分别安装在多段支撑导向架3上,安装后的转盘4可通过滑动组件10在支撑导向架3上灵活转动。其中,转盘4采用铝合金制成,要求质轻、规矩平整,可按设置的圆心水平稳定旋转,保证良好的随动性,并有足够的强度,确保安全。转盘4通过滑动组件10安装在支撑导向架3上后,滑动组件10对转盘4具有限位作用,不允许转盘4偏离中心和不允许转盘4水平跳动。
38.弹性皮筋5的数量至少为两根,根据需要也可为三根、四根或多根,弹性皮筋5对称固定在转盘4上。弹性皮筋5的作用是约束运动者在弹性运动平台2上运动,保证安全,同时扩展运动者在运动时的体验感。
39.柔性束腰件6通过弹性皮筋5设置在弹性运动平台2的上方,采用柔性材质制成,使用时系在运动者的上体腰肩部,作用一是收纳运动者随身衣带,避免其干扰运动;作用二是提气拔神,有助于运动者处于良好的运动状态;作用三是与弹性皮筋5有机组合,形成一个有效的安全防护屏障,并使运动者始终处于合适位置。
40.另外,为了提高装置的使用安全性,本实施例在转盘4的外环侧还垂直固定有限位挡环11,该限位挡环11的高度大于在转盘4的厚度,其主要与滑动组件10配合,用以抑制转盘4水平漂移,使其旋转时始终保持在圆心上。
41.本实施例在实际使用时,运动者通过柔性束腰件6、弹性皮筋5和转盘4可实现包括朝前、后、左、右、上、下的任意方向跳跃和顺时针/逆时针360度转体运动的全自由度运动。同时还提高了运动者的活动范围和运动幅度,运动者也可以随意向各个方向突然跳跃和下蹲,使得运动的幅度和即时性可以更大更快,因而技术效果更佳。
42.实施例2作为本发明的一较佳实施方式,本实施例在实施例1的基础上对滑动组件10的结构作了进一步限定。如图6所示,所述滑动组件10包括通过销轴固定在凹槽上部的球面限位轴承12和通过销轴固定在凹槽下部的球面支撑轴承13,球面支撑轴承13与球面限位轴承12之间的间隙略大于转盘4的厚度,转盘4安装在球面支撑轴承13与球面限位轴承12之间,球面支撑轴承13用于支撑转盘4,球面限位轴承12用以抑制转盘4跳动,轴承的外球面与转盘4近似于点接触,以减小转盘4转动时的摩擦系数,实现转盘4按设置的运动轨迹灵活转动。限位挡环11位于球面支撑轴承13与球面限位轴承12之间的外侧,且限位挡环11的高度大于球面支撑轴承13与球面限位轴承12之间间隙的高度,更靠近球面限位轴承12,以便于对转盘4更好的限位。
43.优选的,球面限位轴承12位于球面支撑轴承13的侧上方,且球面支撑轴承13相较于球面限位轴承12更靠近转盘4中心,以便于得到更佳的限位效果和抑制跳动效果。
44.实施例3作为本发明的最较佳实施方式,本实施例在实施例2的基础上增加了拉力调节器14。具体的,转盘4上固定有对称的拉力调节器14,拉力调节器14的数量与弹性皮筋5的数量相同,各弹性皮筋5分别连接在拉力调节器14上。拉力调节器14既可采用拉力在70-200kg的微型卷扬机,也可将弹性皮筋5与卷尺主体相结合设计为可拉伸或收缩的结构,以此实现弹
性皮筋5长度的调节。
45.本实施例通过拉力调节器14能够收纳过长的弹性皮筋5,从而使弹性皮筋5的长度能够根据不同力度进行调节,以达到弹性皮筋5始终处于合理的最佳长度和适度的弹性力度。并且,还可使转盘4按照轨迹水平滑动,保持弹性皮筋5处于运动者体位的理想位置,进而便于运动者的全自由度运动。
46.最后需要说明的是,本发明所述装置申请人共设计了两种不同的结构,且经众多体验者试用,反馈效果较好。目前,该两种结构申请人已接受委托并准备实际生产,为了能够在后期防止侵权以及有效占领市场,因而申请人对该两种结构分别申请了专利予以保护。
47.以上所述,仅为本发明的具体实施方式,本说明书中所公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的替代特征加以替换;所公开的所有特征、或所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以任何方式组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1