一种非接触式婴儿学步智能引导玩具
1.本发明涉及婴儿学步技术领域,具体为一种非接触式婴儿学步智能引导玩具。
背景技术:
2.爬行是每个婴儿的必经阶段,是人一生中手脚等各个身体器官的最先综合协调使用,它对整个人生都会有影响。宝宝爬行可显著地帮助其大脑发育,使大脑对手、足、眼的神经运动调控得以加强,便于开发孩子的智力潜能。爬行产生的经验一方面使婴儿对空间位置的定位与记忆更为精确,促进婴儿对目标物的高度敏感性;另一方面也增强了个体对行为手段与行为目的的区分,帮助婴儿排除外界干扰。运动经验产生的功能性结果恰恰促进了婴儿搜寻任务中所需要的心理能力的发展,可见,爬行经验对较高发展水平的空间认知能力可能具有重要影响作用。婴儿学走路的时期一般为10个月到1岁8个月期间。婴儿学走路的时候活动量非常大,父母拉着孩子的胳膊防止婴儿摔倒,以至于父母身心疲惫。玩具对于婴儿的发展有着重要的作用。给婴儿提供形式多样的、适应其身心发展的玩具,就是给其提供了一个具有丰富刺激的环境,对于促进其大脑和心理发展的作用不可忽视。
3.早在上世纪80年代,就有心理学家对婴儿的模仿行为进行了研究。研究表明,在出生后最初的4个小时中,婴儿就已经具有模仿能力了。那时的婴儿模仿的是张开嘴、撅起嘴,或者是在嘴里动舌头。婴幼儿学习从模仿开始,大一点儿的婴儿能够通过模仿学习三种类型的行为。
4.现有的市场上多采用一些接触性的玩具和辅助装置例如学步车和推推乐,仅可以通过婴儿的接触使用来辅助学步,而不能陪伴孩子使得婴儿在学习和模仿的过程中进行学步,大人长时间趴在地上引导婴儿学步也不够便捷,接触式的玩具表面容易滋生细菌,长时间与婴儿接触误入口鼻会引发疾病等危害,影响婴儿的健康成长;另外,此类接触式学步方式,因为有外力的辅助,婴儿在适应了有外力辅助的情况下走路,在撤去外力辅助后,婴儿需要重新适应没有外力辅助的情形,其安全感也会缺失,为此,我们提出一种非接触式婴儿学步智能引导玩具。
技术实现要素:
5.本发明的目的在于提供一种便于锻炼婴儿学习能力减少细菌接触的非接触式婴儿学步智能引导玩具,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种非接触式婴儿学步智能引导玩具,包括机体、移动装置、路径识别装置、吸引装置、监测装置和骑行装置,所述移动装置安装于所述机体上,用于带动所述机体进行爬行和行走移动,所述路径识别装置安装于所述机体上,用于对前方移动方向的路线进行识别和规划,所述吸引装置安装于所述机体上,用于吸引婴儿跟随所述机体进行学步,所述监测装置安装于所述吸引装置上,用于监测婴儿与所述机体之间的距离以及对婴儿的状态进行监测判断,所述骑行装置安装于所述机体上,用于在学步引导完成后使得婴儿进行骑行娱乐,便于通过吸引装置吸引婴儿的注意,并
带动机体模仿婴儿进行爬行,爬行过程中会使得婴儿受到吸引而进行模仿和追逐,移动过程中会时刻检测前方的路径障碍物和对婴儿的状态进行监测,当婴儿爬行到距离机体较近位置时,会使得机体逐渐站立行走,从而逐步引导婴儿从爬行逐渐站立,充分利用了婴儿早期的学习模仿能力,同时减少与婴儿身体的接触,减少病毒的传播;而且在学步过程中没有外力辅助,其学会步行后无需再次适应,其安全感在学步过程中逐步建立,对婴儿学步更加健康有效;同时可以对婴儿进行陪伴玩耍,该装置自动化程度高,使用便捷,同时可以在非学步状态供婴儿进行骑行娱乐,增加趣味性。
7.优选的,所述移动装置包括两组机械臂和两组机械腿,两组所述机械臂对称安装于所述机体的两侧,两组所述机械腿对称安装于所述机体的两侧,便于带动机体进行爬行和行走移动。
8.优选的,所述路径识别装置包括与所述机体转动连接的转动块,所述转动块上固定连接有球体,所述球体的侧面固定连接有用于识别前方路径和障碍物的识别探头,便于对前方移动方向的路线进行识别和规划。
9.优选的,所述吸引装置包括用于播放图像的显示屏,所述显示屏的侧面固定连接有转动板,所述机体上开设有转动槽,所述转动板与所述转动槽转动连接,所述机体上固定连接有用于带动所述转动板转动的驱动电机,便于吸引婴儿跟随机体进行学步。
10.优选的,所述监测装置包括固定安装于所述转动板上的距离传感器,所述显示屏的上方固定连接有用于监测婴儿活动状态的摄像头,便于监测婴儿与机体之间的距离以及对婴儿的状态进行监测判断。
11.优选的,所述骑行装置包括升降板,所述机体的上侧开设有与所述升降板滑动连接的升降槽,所述机体上设有用于在所述显示屏收入所述转动槽内时对所述显示屏进行保护的防护件,所述升降板上设有用于在所述显示屏翻转抬起时将所述升降板升起供婴儿骑行的升降件,所述转动板上设有用于在所述显示屏翻转抬起时联动将所述防护件展开使得对婴儿的两侧进行防护的展开件,便于在学步引导完成后使得婴儿进行骑行娱乐。
12.优选的,所述防护件包括两组防护板,两组所述防护板的一侧均固定连接有与所述机体转动连接的转动杆,两组所述防护板远离所述转动杆的一侧均固定连接有扶手垫,所述机体上固定连接有用于防止婴儿腿部被所述机械臂夹伤的弧形板,所述球体的两侧均开设有用于对婴儿腿部进行固定防护的防护槽,所述球体上固定连接有扶手,所述展开件用于控制所述转动杆的转动状态,便于对婴儿骑行时的两侧和使用完成后的显示屏进行防护。
13.优选的,所述升降件包括与所述机体转动连接的第一转轴,所述第一转轴上同轴固定连接有第一齿轮,所述转动板的侧面固定连接有与所述第一齿轮相啮合的齿环,所述机体上转动连接有第二转轴,所述第二转轴上同轴固定连接有第二齿轮,所述第二转轴上传动连接有与所述第一转轴传动连接的同步带,所述升降槽内转动连接有第三转轴,所述第三转轴上同轴固定连接有与所述第二齿轮相啮合的第三齿轮,所述第三转轴的两侧均同轴固定连接有与所述升降槽转动连接的螺纹杆,所述第二齿轮的分度圆半径大于所述第三齿轮的分度圆半径,所述螺纹杆上设有用于在所述螺纹杆转动时联动所述升降板进行升降移动的驱动件,便于带动升降板进行升降收纳。
14.优选的,所述驱动件包括与所述螺纹杆螺纹连接的第一推动板,所述第一推动板
与所述升降槽的内壁沿水平方向滑动连接,所述第一推动板上开设有第一滑槽,所述第一滑槽内滑动连接有第二推动板,所述第二推动板的顶面固定连接有与所述升降板底面沿水平方向滑动连接的滑动块,两组所述第一推动板之间用于存放液压油,便于在螺纹杆转动时联动升降板进行升降移动。
15.优选的,所述展开件包括拉绳,所述螺纹杆的一端固定连接有第一收卷轴,所述转动杆的侧面转动连接有第二收卷轴,所述拉绳的两端分别与所述第一收卷轴和所述第二收卷轴的侧面固定连接,所述拉绳的两端分别缠绕于所述第一收卷轴和所述第二收卷轴的侧面,所述第二收卷轴的内壁固定连接有发条弹簧,所述发条弹簧内侧与所述转动杆的外壁固定连接,便于带动防护板进行翻转。
16.与现有技术相比,本发明的有益效果是:本发明解决了现有的婴儿学步玩具使用时难以锻炼婴儿模仿学习能力的问题,通过设置移动装置、路径识别装置、吸引装置、监测装置和骑行装置,便于通过吸引装置吸引婴儿的注意,并带动机体模仿婴儿进行爬行,爬行过程中会使得婴儿受到吸引而进行模仿和追逐,移动过程中会时刻检测前方的路径障碍物和对婴儿的状态进行监测,当婴儿爬行到距离机体较近位置时,会使得机体逐渐站立行走,从而逐步引导婴儿从爬行逐渐站立,充分利用了婴儿早期的学习模仿能力,同时减少与婴儿身体的接触,减少病毒的传播;而且在学步过程中没有外力辅助,其学会步行后无需再次适应,其安全感在学步过程中逐步建立,对婴儿学步更加健康有效;同时可以对婴儿进行陪伴玩耍,该装置自动化程度高,使用便捷,同时可以在非学步状态供婴儿进行骑行娱乐,增加趣味性。
附图说明
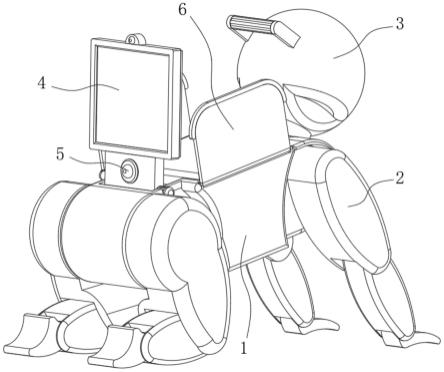
17.图1为本发明整体结构示意图;图2为本发明移动装置结构示意图;图3为本发明吸引装置结构示意图;图4为图3中a区域放大图;图5为本发明路径识别装置结构示意图;图6为本发明内部结构示意图;图7为图6中b区域放大图;图8为本发明骑行装置结构示意图;图9为图8中c区域放大图。
18.图中:1-机体;2-移动装置;3-路径识别装置;4-吸引装置;5-监测装置;6-骑行装置;7-机械臂;8-机械腿;9-转动块;10-球体;11-识别探头;12-显示屏;13-转动板;14-转动槽;15-驱动电机;16-距离传感器;17-摄像头;18-升降板;19-升降槽;20-防护件;21-升降件;22-展开件;23-防护板;24-转动杆;25-扶手垫;26-弧形板;27-防护槽;28-扶手;29-第一转轴;30-第一齿轮;31-齿环;32-第二转轴;33-第二齿轮;34-同步带;35-第三转轴;36-第三齿轮;37-螺纹杆;38-驱动件;39-第一推动板;40-第一滑槽;41-第二推动板;42-滑动块;43-拉绳;44-第一收卷轴;45-第二收卷轴;46-发条弹簧。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.实施例1请参阅图1,图示中的一种非接触式婴儿学步智能引导玩具,包括机体1、移动装置2、路径识别装置3、吸引装置4、监测装置5和骑行装置6,移动装置2安装于机体1上,用于带动机体1进行爬行和行走移动,路径识别装置3安装于机体1上,用于对前方移动方向的路线进行识别和规划,吸引装置4安装于机体1上,用于吸引婴儿跟随机体1进行学步,监测装置5安装于吸引装置4上,用于监测婴儿与机体1之间的距离以及对婴儿的状态进行监测判断,骑行装置6安装于机体1上,用于在学步引导完成后使得婴儿进行骑行娱乐。
21.请参阅图1-图2,图示中的移动装置2包括两组机械臂7和两组机械腿8,两组机械臂7对称安装于机体1的两侧,两组机械腿8对称安装于机体1的两侧。
22.请参阅图1-图5,图示中的路径识别装置3包括与机体1转动连接的转动块9,转动块9上固定连接有球体10,球体10的侧面固定连接有用于识别前方路径和障碍物的识别探头11。
23.请参阅图1-图9,图示中的吸引装置4包括用于播放图像的显示屏12,显示屏12的侧面固定连接有转动板13,机体1上开设有转动槽14,转动板13与转动槽14转动连接,机体1上固定连接有用于带动转动板13转动的驱动电机15。
24.请参阅图1-图7,图示中的监测装置5包括固定安装于转动板13上的距离传感器16,显示屏12的上方固定连接有用于监测婴儿活动状态的摄像头17。
25.本实施方案中,驱动电机15型号优选ld60微型电机,通过机体1控制机械臂7和机械腿8的移动即可使得机体1进行爬行,此时驱动电机15带动转动板13转动从而使得显示屏12变为竖直状态,屏幕向后播放婴儿喜欢的图像,吸引婴儿跟随爬行,通过距离传感器16可以检测婴儿与机体1之间的距离,当距离过远时降低机体1的移动速度,当距离过近时提升机体1的移动速度,逐渐操作机械腿8进行站立并使得机械臂7下摆,引导婴儿从爬行逐渐开始行走,通过机体1带动转动块9的转动可以控制识别探头11不断对前方的路线进行规划,避开障碍物,防止对婴儿造成磕碰,通过摄像头17可以持续对婴儿的活动状态进行监测,并将图像传递到大人的手机等接收设备内,供大人进行观察,当学步完成后,可以将婴儿放置在骑行装置6上进行骑行,通过机械臂7和机械腿8带动机体1和婴儿一起爬行移动,提升婴儿玩耍时的趣味性,在学步时减少与婴儿身体的接触,减少病毒的传播,同时可以对婴儿进行陪伴玩耍,该装置自动化程度高,使用便捷。
26.实施例2请参阅图1-图9说明实施例2,本实施例对实施例1作进一步说明,图示中的骑行装置6包括升降板18,机体1的上侧开设有与升降板18滑动连接的升降槽19,机体1上设有用于在显示屏12收入转动槽14内时对显示屏12进行保护的防护件20,升降板18上设有用于在显示屏12翻转抬起时将升降板18升起供婴儿骑行的升降件21,转动板13上设有用于在显示屏12翻转抬起时联动将防护件20展开使得对婴儿的两侧进行防护的展开件22。
27.请参阅图2-图9,图示中的防护件20包括两组防护板23,两组防护板23的一侧均固定连接有与机体1转动连接的转动杆24,两组防护板23远离转动杆24的一侧均固定连接有扶手垫25,机体1上固定连接有用于防止婴儿腿部被机械臂7夹伤的弧形板26,球体10的两侧均开设有用于对婴儿腿部进行固定防护的防护槽27,球体10上固定连接有扶手28,展开件22用于控制转动杆24的转动状态。
28.本实施方案中,当显示屏12翻转展开时,会通过展开件22联动转动杆24进行转动,从而带动两侧的防护板23向外翻转展开,与显示屏12的背面形成三面防护,同时显示屏12的背面、升降板18的顶面以及防护板23的侧面均设有棉垫(未示出)提升对婴儿的保护,随着显示屏12的外翻会带动升降件21使得升降板18上移顶出便于婴儿进行骑行,婴儿坐在升降板18上,两侧的扶手垫25也会对婴儿的手臂进行防护,同时可以手握扶手28,双腿放置在弧形板26上受到防护槽27的夹紧防护,全面提升了对婴儿的保护,此时即可通过机体1的移动带动婴儿进行娱乐,当骑行结束时,抱走婴儿,此时带动显示屏12转动收回转动槽14内,联动升降件21和展开件22使得升降板18下移的同时带动防护板23翻转将显示屏12盖住,防止屏幕受损。
29.实施例3请参阅图6-图7说明实施例3,本实施例对实施例1作进一步说明,图示中的升降件21包括与机体1转动连接的第一转轴29,第一转轴29上同轴固定连接有第一齿轮30,转动板13的侧面固定连接有与第一齿轮30相啮合的齿环31,机体1上转动连接有第二转轴32,第二转轴32上同轴固定连接有第二齿轮33,第二转轴32上传动连接有与第一转轴29传动连接的同步带34,升降槽19内转动连接有第三转轴35,第三转轴35上同轴固定连接有与第二齿轮33相啮合的第三齿轮36,第三转轴35的两侧均同轴固定连接有与升降槽19转动连接的螺纹杆37,第二齿轮33的分度圆半径大于第三齿轮36的分度圆半径,螺纹杆37上设有用于在螺纹杆37转动时联动升降板18进行升降移动的驱动件38。
30.请参阅图6-图9,图示中的驱动件38包括与螺纹杆37螺纹连接的第一推动板39,第一推动板39与升降槽19的内壁沿水平方向滑动连接,第一推动板39上开设有第一滑槽40,第一滑槽40内滑动连接有第二推动板41,第二推动板41的顶面固定连接有与升降板18底面沿水平方向滑动连接的滑动块42,两组第一推动板39之间用于存放液压油。
31.请参阅图1-图3,图示中的展开件22包括拉绳43,螺纹杆37的一端固定连接有第一收卷轴44,转动杆24的侧面转动连接有第二收卷轴45,拉绳43的两端分别与第一收卷轴44和第二收卷轴45的侧面固定连接,拉绳43的两端分别缠绕于第一收卷轴44和第二收卷轴45的侧面,第二收卷轴45的内壁固定连接有发条弹簧46,发条弹簧46内侧与转动杆24的外壁固定连接。
32.本实施方案中,显示屏12和转动板13转动时会带动齿环31转动,从而带动第一齿轮30转动,第一齿轮30带动第一转轴29使得同步带34带动第二转轴32转动,第二转轴32带动第二齿轮33转动使得第三齿轮36转动,由于第二齿轮33的分度圆半径大于第三齿轮36的分度圆半径,使得在第二齿轮33小幅度转动时会带动第三齿轮36转动较多圈数,从而使得第三转轴35和两侧的螺纹杆37同时转动多圈,螺纹杆37带动第一收卷轴44拉动拉绳43,从而带动第二收卷轴45转动,发条弹簧46压缩后带动转动杆24转动,即可使得防护板23转动,螺纹杆37带动第一推动板39相向滑动即可使得第二推动板41在升降板18的底面滑动,液压
油被压缩推动升降板18上移,同时第二推动板41在第一滑槽40内上移,即可带动升降板18滑出升降槽19,方便婴儿进行坐下,当显示屏12反向转动收回时,带动第一齿轮30反向转动,即可使得第二齿轮33、第三齿轮36以及螺纹杆37同时反向转动,第一收卷轴44降低对拉绳43的拉力,从而使得防护板23反向转动收回将显示屏12盖住,第一推动板39向两侧滑动的同时会使得液压油受到的推力降低,从而减小对升降板18底部的推力,升降板18即可下移进行收纳。
33.值得注意的是:通过发条弹簧46的设置使得拉绳43在拉动时可以直接将防护板23打开,防护板23打开到最大程度后拉绳43继续拉动可以带动第二收卷轴45转动,此时显示屏12逐渐翻转不会受到防护板23的影响,在关闭时防护板23会在发条弹簧46复位后再翻转,防止其提前翻转阻挡显示屏12的转动。
34.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
35.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1