一种采用双直线电机驱动的跑步机
1.本发明属于跑步机领域,具体涉及一种采用双直线电机驱动的跑步机。
背景技术:
2.随着经济的高速发展,人们对于身体健康越来越重视,跑步机的普及让人们足不出户就可以锻炼身体。但人在传统跑步机上运动时,无论速度快与否,腿部都要承受自身1-2倍的反作用力,而这个反作用力通常由关节和肌肉所吸收,但人体腿部关节如膝盖、脚踝等长时间受到磨损就会造成不可逆的损伤,从而影响人的正常生活。如何缓冲人在跑步机上跑步时受到的反作用力,减小对关节的损伤,达到真正锻炼身体健康的目的得到越来越广泛的应用。
3.目前的跑步机,包括以下几种:
4.传统跑步机:使用旋转电机驱动,履带下直接连接底板,没有任何缓冲装置,脚掌落地时会受到极大的冲击力。
5.减震跑步机:使用旋转电机驱动,履带下多为蜂窝减震材质堆叠,部分加装磁悬浮装置,有一定缓冲功能,但缓冲效果不佳,且缓冲机构随使用时间增加,性能降低,易损坏。
6.由此可知,虽然现有跑步机有相关缓冲结构的设计,但这种缓冲结构主要靠橡胶材料的弹性特性来实现,总体比较刚性,跑步时对于健身者上述关节部位的冲击仍显较大。所以,目前市售跑步机从缓冲角度来说有待改善,且不适合中老年人和比较肥胖的人群,因为他们的关节承受不了强力冲击。
7.为此,我们提出一种采用双直线电机驱动的跑步机。
技术实现要素:
8.针对现有技术的不足,本发明的目的在于公开一种采用双直线电机驱动的跑步机,可以实时追踪人跑步过程中的步态,通过所述运动踏板在人脚掌落地的微动削弱反作用力,从而达到保护腿部关节不受损伤的目的。
9.本发明的目的可以通过以下技术方案实现:一种采用双直线电机驱动的跑步机,包括跑步机机体,所述跑步机机体上设有直线电机和控制器,直线电机上设有可以驱动进行往复直线运动的压力感应跑步板,直线电机上设有直线位置传感器连接所述控制器,控制器电性连接直线电机和压力感应跑步板,通过压力感应跑步板和直线位置传感器反馈信息,控制器可以实时通过跑步者的跑步速度调整所述压力感应跑步板的速度。
10.作为进一步的优选方案,所述直线电机的数量为两台,分别对应跑步者的两只脚掌。
11.作为进一步的优选方案,所述跑步机机体包括跑步机底架,跑步机底架上设有多根横梁,两台直线电机固定在多根横梁上。
12.作为进一步的优选方案,所述直线电机包括直线电机动子和直线电机定子,直线电机定子上设有导轨,直线电机动子上活动连接压力感应跑步板,直线电机动子相对于直
线电机定子做往复直线运动。
13.作为进一步的优选方案,所述压力感应跑步板包括运动踏板,运动踏板上设有压力传感器,当运动踏板上的压力传感器采集到的初始受力角度小于90
°
,则根据受力大小转换成电信号传给控制器确定运动踏板向前方微动的位移量,随着受力角度增大,根据受力不同角度不同,控制器控制运动踏板开始向后进行移动并实时调节速度。
14.作为进一步的优选方案,所述直线电机动子上连接连接板,连接板的下端活动连接导轨,所述连接板的上端连接运动踏板。
15.作为进一步的优选方案,所述连接板的数量为两组,通过螺栓与直线电机动子两侧连接,两个连接板上端通过螺栓连接运动踏板。
16.作为进一步的优选方案,所述直线位置传感器位于直线电机定子的侧端,直线位置传感器可以对直线电机动子位置进行实时测量,转化成电信号反馈到控制器,控制器解耦后确定直线电机动子的运动位置及速度,并对直线电机动子进行反馈跟踪。
17.作为进一步的优选方案,所述控制器的数量为两台,分别对应控制每台直线电机和直线电机上的压力传感器和直线位置传感器。
18.本公开的有益效果:
19.本发明采用的是双直线电机,每台电机独立运动,可以适应人在跑步机上任意速度的运动,且两块独立的运动踏板可以在人脚掌落地瞬间根据受力大小及方向进行向前微动,抵消落地瞬间向前的制动力,可以实时追踪人跑步过程中的步态,通过所述运动踏板在人脚掌落地的微动削弱反作用力,从而达到保护腿部关节不受损伤的目的。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
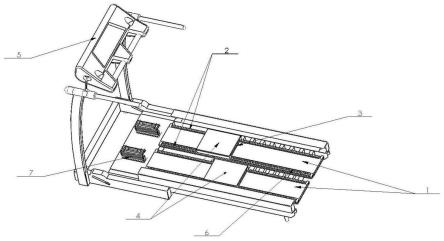
21.图1为本发明跑步机结构示意图;
22.图2为本发明跑步机底架结构示意图;
23.图3为本发明直线电机结构示意图;
24.图4为本发明压力感应跑步板结构示意图;
25.图5为脚掌运动着地受力分析示意图。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
27.本发明的目的是针对现有跑步机中技术存在的上述问题,提出了一种双直线电机驱动的跑步机结构,以缓冲跑步过程中对腿部关节的损伤。
28.为了实现上述目的,本发明采用以下技术方案:一种采用双直线电机的跑步机,包括跑步机机体5,跑步机机体5可采用现有技术中的标准件,其上附带操作面板,所述跑步机机体5一端内部固设有控制器7,控制器7的数量为2组,2组控制器7组装起来时通过保护壳体罩在其内部,为方便理解本图1中为打开保护壳体后的示意;
29.如图1和图2所示,每组控制器7分别连接对应的一台直线电机1,直线电机1的数量为两台,两台直线电机1固定在跑步机机体5的跑步机底架9的多根横梁8上,其中采用双直线电机作为跑步机的驱动,包括带不限于永磁同步直线电机、直线磁阻电机、感应直线电机等其他类型的直线电机;
30.如图3和图4所示,每台直线电机1上的直线电机动子3两侧通过螺栓连接连接板11,连接板11采用钢材材质提升强度,两个连接板11的下端连接至直线电机1上的导轨2,两个连接板11上端通过螺栓连接运动踏板4,运动踏板4表面埋有多个压力传感器12,当运动踏板4上的压力传感器12采集到的初始受力角度小于90
°
(以传感器面为水平方向),则根据受力大小转换成电信号传给控制器7确定运动踏板4向前方微动的位移量;随着受力角度增大,根据受力不同角度不同,控制器7控制运动踏板4开始向后进行移动并实时调节速度。压力传感器12型号使用当前技术的标准件,多个压力传感器12连接对应的控制器7,直线电机定子10侧端设有直线位置传感器6连接所述控制器7,直线位置传感器6可以对直线电机动子3位置进行实时测量,转化成电信号反馈到控制器7,控制器7解耦后确定直线电机动子3的运动位置及速度,并对直线电机动子3进行反馈跟踪,直线位置传感器6包括但不限于光栅位置传感器、磁栅位置传感器型号采用现有技术的标准件;
31.本实施例中采用的控制器7具有步态跟踪功能,直线位置传感器6可以实时将运动踏板4的位置信息传到控制器7中,通过步态跟踪,可以实时通过跑步者的跑步速度调整运动踏板4的速度,通过运动踏板的微动来削弱人在运动时受到的反作用力,具体的,控制器7在同时发表的专利(一种跑步机用双直线电机协同控制器及控制方法)中详细介绍。
32.进一步的,控制器7可以通过实时接收压力传感器12返回的数值来确定运动者是否加速或者减速,从而达到自适应控制速度,通过运动踏板步4态跟踪,在人脚掌落地一瞬间,运动踏板4会给脚掌一个向前的微动从而削弱跑步落地因脚掌制动而产生的反作用力。
33.例如:人启动跑步机电源,控制器7驱动两个直线电机1带动运动踏板4归位到中心位置,此时跑者可以双脚分别站到两个运动踏板4上,通过跑步机机体5上的操作面板开启跑步模式,如图5所示,首先是一只脚掌向后蹬运动踏板4,运动踏板4中的直线位置传感器6及压力传感器12将数据返回到步态跟踪控制器7中计算跑者速度,以及落地时间位置,在跑者脚掌即将落地时,运动踏板4及时返回并通过向前微动卸掉脚掌落地向前的制动力(冲力),如此反复运动,即可达成跑步机的效果,且本发明功能不只适用于跑步,还适用于走步和快走。
34.本发明采用的是双直线电机,每台电机独立运动,可以适应人在跑步机上任意速度的运动,且两块独立的运动踏板4可以在人脚掌落地瞬间根据受力大小及方向进行向前微动,抵消落地瞬间向前的制动力,可以实时追踪人跑步过程中的步态,通过所述运动踏板在人脚掌落地的微动削弱反作用力,从而达到保护腿部关节不受损伤的目的。
35.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1