一种基于人工智能的跳绳训练系统及方法与流程
1.本发明属于体育器材技术领域,特别涉及一种基于人工智能的跳绳训练系统及方法。
背景技术:
2.跳绳是一项老少皆宜的全身性有氧运动,目前,跳绳已被纳入中小学生体育测试的必考项目。因此,在日常体育课上对学生跳绳进行训练变得十分重要。
3.随着目标识别技术、人体姿态估计技术、深度学习技术的发展,智慧操场及配套体育设备已在城镇的中小学予以建设和使用。cn112396001a公开了一种基于人体姿态估计和tpa注意力机制的跳绳个数统计方法,可以使用yolo-v5模型对跳绳动作视频进行检测,根据跳绳图像提取人体关键点向量集合中所有腰部的关键点向量、左脚踝部位的关键点向量、右脚踝部位的关键点向量,从而构建关于跳绳者的腰部、左、右脚踝部位的散点图,并拟合成腰部、左、右脚踝部位的波形图,进一步构建srnn模型。判断跳绳动作以达到最终计数的目的。
4.cn202111527726.7公开了一种基于人工智能的跳绳计数系统,通过使用上述人工智能技术openpose算法及yolov5目标检测算法,获取人体姿态关键点数据,可以有效判断跳绳训练者是否存在违规行为,包括是否存在左右脚跳绳、侧身跳绳等,并且不受天气、光照条件、背景等因素的影响,实现了对跳绳训练者的违规检测和智能计数。但是该系统只能针对会跳绳的学生,对学生跳绳的姿态的判断和智能计数,并没有提供姿势调整功能,且对于一些不会跳绳的学生,没有教学和训练功能。关于跳绳的学习和训练仍然停留在人工教学阶段,而且在传统体育教学上,不可能实现一对一教学,因此,跳绳训练学习的效率存在一定的问题。
技术实现要素:
5.为了解决背景技术中提到的问题,提供一种基于人工智能的跳绳训练系统及方法。
6.通过以下技术方案来实现上述目的:
7.本发明提供一种基于人工智能的跳绳训练系统,包括跳绳计数系统,所述跳绳计数系统包括违规检测模块,所述训练系统还包括移动训练装置,其中,所述违规检测模块用于检测用户在所述训练系统中的跳绳状态,当检测到所述跳绳状态为违规动作时,向所述移动训练装置发送数据校正消息,所述移动训练装置基于所述数据校正消息对用户当前跳绳状态进行违规调整;当未检测到违规状态时,所述移动训练装置将当前用户跳绳状态调整进入训练模式以实现跳绳训练。
8.作为上述技术方案的进一步改进,所述移动训练装置包括:
9.脚部训练组件,包括两个左右调节板和后调节板;
10.主控模块,用于接收所述数据校正消息并启动脚部训练组件对用户当前跳绳状态
进行违规调整,具体为:当出现违规状态单脚跳绳时,控制相应脚的左右调节板和后调节板抬起以促使用户跳起下落后跳起脚先发力从而训练双脚跳绳的目的,当出现违规状态侧身跳绳时,控制相应脚的左右调节板单侧抬起以促使用户跳起下落时摆正;
11.其中,所述左右调节板的底部设有对称的四个电动伸缩柱,所述后调节板靠近左右调节板的一端铰接在扇板上,另一端的底部设有两个对称的电动伸缩柱,所述电动伸缩柱由主控模块控制。
12.作为上述技术方案的进一步改进,所述脚部训练组件还包括两个对称的扇板和前调节板,所述前调节板用于训练前脚掌用力,所述前调节板靠近左右调节板的一端铰接在扇板上,另一端的底部设有两个对称的电动弹簧柱;
13.当未检测到违规状态时,所述移动训练装置将当前用户跳绳状态调整进入训练模式以实现跳绳训练,主控模块控制左右调节板为非抬起状态,同时控制前调节板的一侧抬起,用于训练前脚掌用力。
14.作为上述技术方案的进一步改进,两个所述扇板的相对端的顶部均设有转轴,所述扇板的下方底面设有弧轨和在弧轨上滑动的固定块;当出现违规动作侧身跳绳时,主控模块控制所述转轴带动扇板沿侧身方向反向转动,以辅助左右调节板矫正训练者的姿势。
15.作为上述技术方案的进一步改进,所述移动训练装置还包括固定台以及位于固定台中间的护台、位于固定台两侧端的立杆以及在立杆上端滑动的手部训练组件,所述脚部训练组件位于护台中间,所述脚部训练组件上方的设有弹性台。
16.作为上述技术方案的进一步改进,所述训练模式还包括手部训练,通过所述手部训练组件实现,所述手部训练组件用于训练跳绳时用手腕甩绳、自动甩绳起跳以及训练跳绳起跳高度;
17.所述手部训练组件包括一侧开口的箱体以及位于箱体内侧端的竖轨、在竖轨上自由滑动的移动座、位于移动座内部的伺服电机和位于伺服电机输出轴端的转盘,所述转盘的内部设有自动卷绳器,所述自动卷绳器内设有跳绳,且所述跳绳的一端自转盘的中心延伸至外侧,所述跳绳的一端设有活动件,且所述活动件包裹在手持件内部,所述转盘外壁设有自转盘的中心为起点的滑道,所述滑道的末端连接与转盘的中心同圆心的弧道,所述转盘的中心和弧道的末端均设有连接头,所述手持件活动安装在转盘外壁的连接头上。
18.作为上述技术方案的进一步改进,所述手持件包括供跳绳穿过的柱体、位于柱体外表面的硅胶垫以及位于柱体的尾部上端与连接头相匹配的弹簧扣。
19.作为上述技术方案的进一步改进,所述转盘上设有供跳绳穿过的绳孔,绳孔的上下方设有用于对跳绳进行固定的锁绳结构,锁绳结构包括位于绳孔上下方的若干个斜槽、位于斜槽上方的压板、位于压板下方且与压板铰接的若干个锁刺板以及位于压板上方用于升降的升降螺柱组,所述锁刺板沿着斜槽倾斜向下对跳绳进行固定。
20.作为上述技术方案的进一步改进,所述立杆包括固定杆、活动杆和竖杆,两两之间通过阻尼轴连接,通过调节活动杆的倾斜角度来调节手部训练组件的水平距离。
21.作为上述技术方案的进一步改进,所述固定台的底端设有四个对称的滚轮,四个滚轮设置在h状的连接杆上,所述固定台的底端设有供连接杆移动的呈直角c状的活动槽,所述活动槽的上下端设有若干个辅力辊,所述连接杆的其中一端延伸至固定台外,且所述连接杆的一端设有与活动槽开口端螺纹连接的螺纹套。
22.作为上述技术方案的进一步改进,所述固定台的上端设有收纳四个对称滚轮的限位槽。
23.本发明还提供了一种基于上述人工智能的跳绳训练系统的训练方法,所述方法包括:
24.实时检测所述训练系统下当前用户的跳绳状态数据;
25.若所述跳绳状态数据为违规状态数据,则所述移动训练装置根据所述违规状态数据将用户当前跳绳状态进行违规调整,若未检测到违规状态数据时,所述移动训练装置将当前用户跳绳状态调整进入训练模式以实现跳绳训练。
26.作为上述技术方案的进一步改进,所述训练模式包括甩绳训练模式、起跳训练模式、甩绳+起跳训练模式、自动甩绳模式和甩绳脚部调整模式。
27.本发明的有益效果在于:
28.(1)该基于人工智能的跳绳训练系统,利用本公司现有的跳绳计数系统,判断学生在跳绳训练时,是否发生单脚跳绳和侧身跳绳的情况,将信号传输至移动训练装置,使移动训练装置做出辅助性调整,有益于跳绳训练。
29.(2)通过移动训练装置,针对不会跳绳的学生,可以从零基础开始训练,包括训练手脚协调、手腕甩绳、起跳高度和起跳姿势,相比较人工教学,跳绳训练循序渐进,效率高且学习效果明显。
附图说明
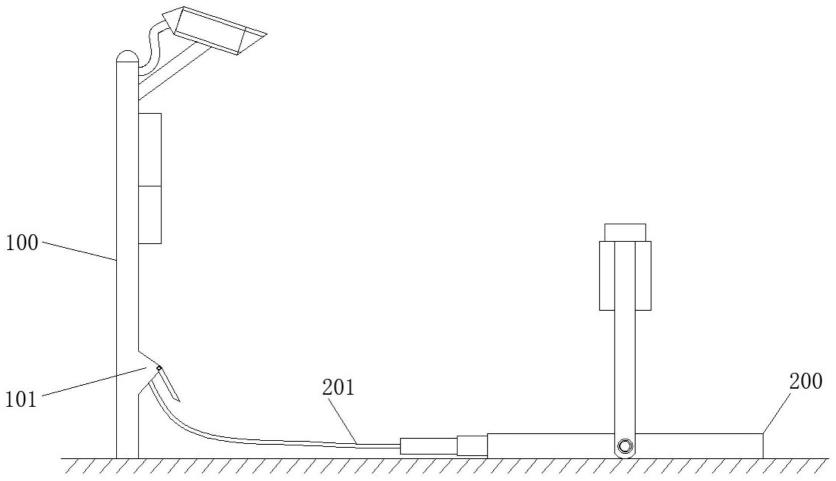
30.图1是本发明基于人工智能的跳绳训练系统的组成示意图;
31.图2是本发明的移动训练装置的正面结构示意图;
32.图3是本发明的移动训练装置的俯视图;
33.图4是本发明的脚部训练组件的俯视和仰视图;
34.图5是本发明的手部训练组件的结构示意图;
35.图6是本发明的手部训练组件中手持件的结构示意图;
36.图7是本发明的手部训练组件中转盘的正面结构示意图;
37.图8是本发明的图5的a处结构放大示意图;
38.图9是本发明的滚轮及其附属结构示意图;
39.图10是本发明中四组滚轮的连接杆示意图;
40.图11是本发明中连接杆活动槽截面示意图;
41.图12是本发明基于人工智能的跳绳训练系统简易框图。
42.图示:100、跳绳计数系统;101、数据接口;200、移动训练装置;201、数据插头;
43.1、固定台;2、护台;3、脚部训练组件;301、扇板;302、转轴;3021、驱动电机;303、弧轨;304、固定块;305、左右调节板;306、前调节板;307、后调节板;308、电动弹簧柱;309、电动伸缩柱;4、弹性台;5、立杆;501、固定杆;502、阻尼轴;503、活动杆;504、竖杆;6、手部训练组件;7、滚轮;701、连接杆;702、活动槽;703、辅力辊;704、螺纹套;8、限位槽;9、竖轨;10、移动座;11、伺服电机;12、转盘;13、手持件;1301、柱体;1302、硅胶垫;1303、弹簧扣;14、自动卷绳器;15、跳绳;16、连接头;17、活动件;18、滑道;19、弧道;20、斜槽;21、压板;22、锁刺板;23、升降螺柱组。
具体实施方式
44.下面结合附图对本技术作进一步详细描述,有必要在此指出的是,以下具体实施方式只用于对本技术进行进一步的说明,不能理解为对本技术保护范围的限制,该领域的技术人员可以根据上述申请内容对本技术做出一些非本质的改进和调整。
45.实施例1
46.如图1所示,本实施例的基于人工智能的跳绳训练系统,包括跳绳计数系统100和移动训练装置200,在训练时,从器材库中将移动训练装置移动至跳绳计数系统100摄像头的正前方指定区域,并且将移动训练装置200的固定台1前端的数据接口101连接的数据插头201与跳绳计数系统100设备杆上的数据接口101连接,建立数据连接,移动训练装置200的主控模块,用于接收跳绳计数系统100的数据并控制移动训练装置200,训练者站立到移动训练装置200上。
47.在本技术中采用的跳绳计数系统100为现有技术,具体的,跳绳计数系统100包括工控机、摄像头、喇叭和显示屏,并用于对指定区域内的跳绳训练者进行计数;在指定区域的正前方布置有摄像头用于对跳绳训练者进行正向拍摄,工控机上设置有:数据采集模块、指令模块、运动员检测模块、预处理模块、违规检测模块、计数模块、报警模块和数据输出模块。
48.如图2-3所示,移动训练装置200包括固定台1以及位于固定台1中间的护台2、位于护台2中间的脚部训练组件3、位于脚部训练组件3上方的弹性台4、位于固定台1两侧端的立杆5以及在立杆5上端滑动的手部训练组件6;脚部训练组件3包括两个对称的扇板301以及位于每个扇板301上的前调节板306、左右调节板305和后调节板307,左右调节板305的底部铰接有对称的四个电动伸缩柱309,后调节板307靠近左右调节板305的一端铰接在扇板301上,另一端的底部铰接设有两个对称的电动伸缩柱309,电动伸缩柱309由主控模块控制启动。训练开始后,训练者站立到弹性台4上,连接跳绳计数系统100和移动训练装置200;
49.指令模块通过喇叭和显示屏发出预备信号后,训练者开始站到弹性台4上跳绳训练,数据采集模块利用摄像头采集指定区域内跳绳训练者的入场视频,并给运动员检测模块;运动员检测模块使用openpose算法检测跳绳训练者的双肩关键点间的距离并作为初始距离d0j,运动员检测模块发送检测完成信号给指令模块;指令模块接收到检测完成信号后通过喇叭和显示屏发出起跳信号后,通过显示屏和喇叭播放,训练者开始跳绳,并将起跳信号发送给数据采集模块;数据采集模块根据起跳信号,利用摄像头采集弹性台4上内跳绳训练者的跳绳视频,并给预处理模块;预处理模块提取跳绳视频中的若干个关键帧并发送给违规检测模块;
50.违规检测模块对每个关键帧中跳绳训练者的双脚关键点位置进行检测,以判断其是否在指定站立区域内,若是,则继续检测,否则判定出线违规并通过喇叭播报,使得训练者调整自己的位置至图3中指定区域内;
51.如图4和图12所示,跳绳动作开始后,违规检测模块根据跳绳训练者的双脚关键点位置判断是否存在左右脚跳绳,若不存在,则继续检测,若存在,则判定违规并通过喇叭播报,同时,违规检测模块将分析的左脚或右脚单脚跳绳的数据校正消息利用数据输出模块传送至移动训练装置200的主控模块,由移动训练装置200的主控模块控制对应脚下的扇板301上的左右调节板305四组电动伸缩柱309(a1-a4)启动,使得该左右调节板305升高,起跳
下落时,两个脚落到实处时会存在高度差,使得膝盖曲度不同,使得训练者在抬起的脚上重点发力,从而起到矫正单脚跳绳的作用。
52.违规检测模块根据跳绳训练者的双肩关键点间的距离判断是否存在侧身跳绳,若存在,则判定侧身违规并通过喇叭播报,同时,违规检测模块将分析的左脚或右脚单脚跳绳的数据校正消息发送给数据输出模块传送至移动训练装置200的主控模块,由移动训练装置200的主控模块控制两个扇板301上的左右调节板305其中一侧电动伸缩柱309(a1-a2或a3-a4)启动,使得对正在起跳的学生脚掌落地时有一个力的推动,促使身子摆正;进一步地,两个扇板301的相对端的顶部均设有转轴302,转轴302带动扇板301转动,扇板301的下方底面设有弧轨303,护台2的上设有两个在弧轨303上滑动的固定块304,跳绳计数系统100检测到学生存在侧身动作时,驱动电机3021带动两个转轴302向侧身方向相反的方向转动,与左右调节板305协同,形成一个微小的推力,在起跳落下时对学生的脚掌有一个推动的作用,使其身子摆正。
53.前调节板306用于训练前脚掌用力,前调节板306靠近左右调节板305的一端铰接在扇板301上,另一端的底部铰接设有两个对称的电动弹簧柱308,电动弹簧柱308在违规动作出现时,由主控模块控制处于回缩状态,当没有违规动作出现时,主控模块控制电动弹簧柱308抬起,在训练者脚落下时回缩,跳起时又自动抬起,电动弹簧柱308的倾斜高度大于后调节板307的倾斜高度,如此,学生在起跳后落地的一瞬间,前脚掌先落到实处,下意识发力,可以针对零基础学生或全脚掌发力的学生,在跳绳练习时使用前脚掌发力,且后调节板307(b1-b2)用于训练后脚掌抬起,与前调节板306协同,在学生在起跳后落地的一瞬间,前脚掌先落到实处,首先用力,随后,后脚掌落到倾斜的后调节板307上,促使学生的后脚掌抬起,在下一个起跳过程中,后脚掌习惯性抬起,增强肌肉记忆,有利于跳绳训练。
54.实施例2
55.如图5-7所示,手部训练组件6包括一侧开口的箱体以及位于箱体内侧端的竖轨9、在竖轨9上自由滑动的移动座10、位于移动座10内部的伺服电机11和位于伺服电机11输出轴端的转盘12,转盘12的内部设有自动卷绳器14,自动卷绳器14内设有跳绳15,且跳绳15的一端自转盘12的中心延伸至外侧,跳绳15的一端设有活动件17,且活动件17包裹在手持件13内部,转盘12外壁设有自转盘12的中心为起点的滑道18,滑道18的末端连接与转盘12的中心同圆心的弧道19,转盘12的中心和弧道19的末端均设有连接头16,手持件13活动安装在转盘12外壁的连接头16上,手持件13包括供跳绳15穿过的柱体1301、位于柱体1301外表面的硅胶垫1302以及位于柱体1301的尾部上端与连接头16相匹配的弹簧扣1303。
56.如图8所示,转盘12上设有供跳绳15穿过的绳孔,绳孔的上下方设有用于对跳绳15进行固定的锁绳结构,锁绳结构包括位于绳孔上下方的若干个斜槽20、位于斜槽20上方的压板21、位于压板21下方且与压板21铰接的若干个锁刺板22以及位于压板21上方用于升降的升降螺柱组23,升降螺柱组23由两组垂直分布的螺柱组成,转动横向的螺柱,带动竖向的螺柱升降,竖向的螺柱与压板21转动连接,从而带动压板21升降,锁刺板22沿着斜槽20倾斜向下对跳绳15进行固定。
57.在训练甩绳时,将手持件13从转盘12中心的连接头16取出,并将跳绳15拽出一定长度,然后利用锁绳结构将跳绳15固定,学生站在弹性台4上的跳绳区域,两手掌心向上平握手持件13,开始训练手腕甩绳,由于跳绳15的末端还连接有转盘12、移动座10、伺服电机
11具有一定的重量,使得手腕发力,增强肌肉记忆;
58.在训练手甩绳的同时训练平地起跳,由于移动座10在竖轨9上自由滑动,无阻尼,起跳时,会带动转盘12和移动座10上升,由于箱体具有一定的高度,移动座10在竖轨9上升降的高度有限,以此可以训练跳绳的起跳高度,避免起跳过高,手持件13在起跳的同时还需要带动一定的重量一起,可以更好的训练手腕发力;
59.在训练自动甩绳起跳时,打开锁绳结构,从手持件13中将活动件17连带跳绳15抽出,与另一侧手持件13的活动件17相连接,活动件17优选塑料材质,形成一个完整的跳绳,然后将手持件13自转盘12的中心沿滑道18滑至弧道19的末端,固定在弧道19末端的连接头16上,然后用锁绳结构将跳绳15固定,启动伺服电机11带动转盘12转动,以此将组成的跳绳甩起,可以在不用甩绳的情况下训练起跳。
60.立杆5包括固定杆501、活动杆503和竖杆504,两两之间通过阻尼轴502连接,通过调节活动杆503的倾斜角度来调节手部训练组件6的水平距离。
61.本实施例基于上述人工智能的跳绳训练系统的训练方法,包括:
62.利用跳绳计数系统100实时检测所述训练系统下当前用户的跳绳状态数据;
63.若所述跳绳状态数据为违规状态数据,则所述移动训练装置根据所述违规状态数据将用户当前跳绳状态进行违规调整,若未检测到违规状态数据时,所述移动训练装置将当前用户跳绳状态调整进入训练模式以实现跳绳训练。
64.训练模式包括以下几种,在跳绳零基础的学生,可以按照(1)-(5)顺序训练,有基础的学生,可以从(3)开始训练,具体为:
65.(1)甩绳训练模式:将手持件13从转盘12中心的连接头16取出,并将跳绳15拽出一定长度,然后利用锁绳结构将跳绳15固定,学生站在弹性台4上的跳绳区域,两手掌心向上平握手持件13,开始训练手腕甩绳;
66.(2)起跳训练模式:不握绳单纯在弹性台4上起跳,利用跳绳计数系统100检测学生是否存在左右脚跳绳或侧身跳绳,是则启动左右调节板305、后调节板307进行调整,否则利用前调节板306训练前脚掌用力;
67.(3)甩绳+起跳训练模式:在(1)和(2)的基础上,起跳时,会带动转盘12和移动座10上升,由于箱体具有一定的高度,移动座10在竖轨9上升降的高度有限,以此可以训练跳绳的起跳高度,避免起跳过高;
68.(4)自动甩绳模式:从手持件13中将活动件17连带跳绳15抽出,与另一侧手持件13的活动件17相连接,形成一个完整的跳绳,然后将手持件13自转盘12的中心沿滑道18滑至弧道19的末端,固定在弧道19末端的连接头16上,然后用锁绳结构将跳绳15固定,启动伺服电机11带动转盘12转动,以此将组成的跳绳甩起,可以在不用甩绳的情况下训练起跳;
69.(5)脚部调整模式:当训练到一定程度后,通过自己甩绳,通过跳绳计数系统100检测,在(2)的基础上单纯训练脚部动作,同时也可以利用计数模块,对跳绳训练者的跳绳总个数qj进行计数,使得学生了解自己的训练情况。
70.实施例3
71.如图9-11所示,在实施例1或2的基础上,固定台1的底端设有四个对称的滚轮7,四个滚轮7设置在h状的连接杆701上,固定台1的底端设有供连接杆701移动的呈直角c状的活动槽702,活动槽702的上下端设有若干个辅力辊703,使得仅通过握住h状连接杆701的其中
一端就能带动整个结构移动,连接杆701的其中一端延伸至固定台1外,且连接杆701的一端设有与活动槽702开口端螺纹连接的螺纹套704。器材库中的移动训练装置200为堆叠状态,将其卸下后,利用滚轮7推动至跳绳计数系统100处,然后将螺纹套704旋出活动槽702,顺着活动槽702的轨迹移动到上方,再使用螺纹套704固定即可,此时滚轮7被收起,固定台1平铺在地面上,使得跳绳更稳定。
72.固定台1的上端设有收纳四个对称滚轮7的限位槽8,在不使用移动训练装置200的时候,将其进行堆叠,将滚轮7放下伸入限位槽8中,可以防止其移动,使得堆叠稳定。
73.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1