一种捞鱼机的制作方法
1.本实用新型涉及游戏设备技术领域,具体涉及一种捞鱼机。
背景技术:
2.礼品抓取游戏设备深受广大消费者的喜爱,目前,市面上的礼品抓取游戏设备的种类繁多,抓娃娃的机器、抓零食的机器、抓龙虾的机器等都比较常见,但是抓鱼的机器却非常少见。
3.中国发明专利cn112056266a公开了在一种抓鱼机,该抓鱼机可通过天车控制机械爪抓鱼,该专利的机械爪的卡爪夹持臂设计为瓣状渔网,在机械爪抓取时,所有瓣状渔网聚合在一起形成一个完整的网兜,从而实现抓鱼。其存在的问题是:游戏的趣味性不足,并且瓣状渔网合拢时,容易将鱼缸内的鱼夹伤,造成鱼缸内的鱼死亡。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型提供了一种捞鱼机,以增加游戏的趣味性,避免抓鱼的时候将鱼缸内的鱼弄伤。
5.本实用新型提供了一种捞鱼机,包括机体、鱼缸、下鱼口、抓鱼机构和移动机构,所述机体内设有抓鱼室,所述鱼缸和下鱼口均置于所述抓鱼室内,下鱼口靠近鱼缸设置,机体的前侧设有与所述下鱼口的下部连通的取鱼口,所述抓鱼机构设于所述鱼缸和下鱼口的上方,所述移动机构用于带动所述抓鱼机构在抓鱼室纵横移动,所述抓鱼机构包括升降机构、捞鱼杆、捞鱼网和翻转机构,所述升降机构与连接于所述移动机构下,所述升降机构与所述捞鱼杆相连,用于驱动捞鱼杆升降,所述捞鱼网一侧的边缘设有连接座,所述连接座铰接于所述捞鱼杆的下端,所述翻转机构用于驱动捞鱼网相对于捞鱼杆翻转。
6.进一步地,所述升降机构包括竖向导轨、安装在所述竖向导轨两端的第一传动轮、套设于两所述第一传动轮之间的第一传送带、用于驱动任一所述第一传动轮转动的第一电机以及滑动安装于所述竖向导轨上并固定于所述第一传送带的第一滑座,所述捞鱼杆固定于所述第一滑座。
7.进一步地,所述翻转机构包括第二电机、驱动柄、第一连杆、滑动杆和第二连杆;
8.所述第二电机固定安装于所述捞鱼杆的上端,所述驱动柄的一端固定于所述第二电机的输出轴上,所述第一连杆的上端铰接于驱动柄另一端,所述滑动杆的上端铰接于第一连杆的下端,所述第二连杆的上端铰接于滑动杆的下端,第二连杆的下端铰接于所述连接座;
9.所述捞鱼杆的一侧设有导向支架,所述导向支架与所述滑动杆滑动导向配合。
10.进一步地,所述移动机构包括纵移机构和横移机构,所述纵移机构包括固定于所述抓鱼室顶部的纵向导轨、安装在所述纵向导轨两端的第二传动轮、套设于两所述第二传动轮之间的第二传送带、用于驱动任一所述第二传动轮转动的第三电机以及滑动安装于所述纵向导轨上并固定于所述第二传送带的第二滑座;
驱动柄;443-第一连杆;444-滑动杆;445-第二连杆;500-移动机构;510-纵移机构;511-纵向导轨;512-第二传动轮;513-第二传送带;514-第三电机;515-第二滑座;520-横移机构;521-横向导轨;522-第三传动轮;523-第三传送带;524-第四电机;525-第三滑座;530-纵向导杆;531-滑轮安装架;532-滑轮;600-循环过滤系统;610-抽水室;620-一级过滤室;630-水泵;640-物理过滤滤材;650-二级过滤室;660-生化过滤滤材;670-三级过滤室;680-净水过滤滤材;700-充氧管。
具体实施方式
27.下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
28.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本实用新型所属领域技术人员所理解的通常意义。
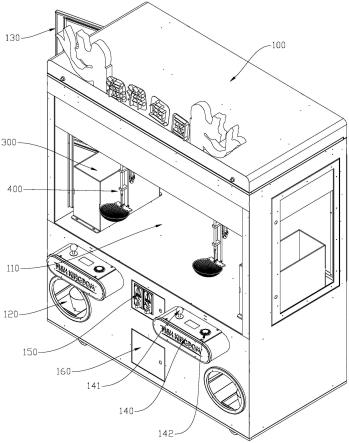
29.本实用新型提供了一种捞鱼机,包括机体100、鱼缸200、下鱼口300、抓鱼机构400和移动机构500。
30.机体100内设有抓鱼室110,鱼缸200和下鱼口300均置于抓鱼室110内,下鱼口300靠近鱼缸200设置,机体100的前侧设有与下鱼口300的下部连通的取鱼口120。
31.为了确保鱼缸200内的鱼能够存活,本实施例还设有循环过滤系统600和充氧管700,循环过滤系统600用于对鱼缸200内的水进行循环过滤,充氧管700用于向鱼缸200内充氧。
32.具体来说,参照图5,循环过滤系统600包括抽水室610、一级过滤室620、用于将抽水室610内的水抽入一级过滤室620的水泵630、设于一级过滤室620内的物理过滤滤材640、接一级过滤室620的二级过滤室650、设于二级过滤室650内的生化过滤滤材660、接二级过滤室650的三级过滤室670、以及设于三级过滤室670内的净水过滤滤材680,抽水室610和三级过滤室670分别与鱼缸200的两侧连通。
33.本实施例中,物理过滤滤材640优选为白棉、生化棉、毛毯或魔毯,生化过滤滤材660优选为陶瓷环、细菌屋、石岩球、生化球或活性炭,净水过滤滤材680优选为珊瑚石或火岩石。
34.采用上述循环过滤系统600,鱼缸200一侧的水进入抽水室610,抽水室610内的水通过水泵630抽入一级过滤室620,经一级过滤室620内的物理过滤滤材640过滤后进入二级过滤室650,再经二级过滤室650内的生化过滤滤材660过滤后进入三级过滤室670,最后通过三级过滤室670内的净水过滤滤材680过滤后进入鱼缸200的另一侧,从而实现鱼缸200内的水的循环过滤,确保鱼缸200内的水质良好。
35.为了方便对鱼缸200进行清洁以及向鱼缸200内人工投放鱼儿,机体100位于抓鱼室110的侧面还设有侧门130。
36.抓鱼机构400设于鱼缸200和下鱼口300的上方,移动机构500用于带动抓鱼机构400在抓鱼室110纵横移动。
37.参照图2、图3和图4,抓鱼机构400包括升降机构410、捞鱼杆420、捞鱼网430和翻转机构440,升降机构410与连接于移动机构500下,升降机构410与捞鱼杆420相连,用于驱动
捞鱼杆420升降,捞鱼网430一侧的边缘设有连接座431,连接座431铰接于捞鱼杆420的下端,翻转机构440用于驱动捞鱼网430相对于捞鱼杆420翻转。
38.本实施例中,捞鱼网430具体可采用不锈钢网,不锈钢网泡在水里,不会生锈,不易滋生细菌,保障鱼缸200内鱼的健康。
39.在一具体的实施例中,升降机构410包括竖向导轨411、安装在竖向导轨411两端的第一传动轮412、套设于两第一传动轮412之间的第一传送带413、用于驱动任一第一传动轮412转动的第一电机414以及滑动安装于竖向导轨411上并固定于第一传送带413的第一滑座415,捞鱼杆420固定于第一滑座415。第一电机414转动时,可通过第一传动轮412带动第一传送带413转动,从而驱动捞鱼杆420升降。当然,在其它实施例中,升降机构410也可以采用丝杠电机、电动或气动伸缩杆等驱动结构。
40.优选地,翻转机构440包括第二电机441、驱动柄442、第一连杆443、滑动杆444和第二连杆445。第二电机441固定安装于捞鱼杆420的上端,驱动柄442的一端固定于第二电机441的输出轴上,第一连杆443的上端铰接于驱动柄442另一端,滑动杆444的上端铰接于第一连杆443的下端,第二连杆445的上端铰接于滑动杆444的下端,第二连杆445的下端铰接于连接座431。捞鱼杆420的一侧设有导向支架421,导向支架421与滑动杆444滑动导向配合。当第二电机441带动驱动柄442向下转动时,驱动柄442通过第一连杆443带动滑动杆444向下滑动,滑动杆444再通过第二连杆445带动捞鱼网430向下转动,当第二电机441带动驱动柄442向上转动时,驱动柄442通过第一连杆443带动滑动杆444向上滑动,滑动杆444再通过第二连杆445带动捞鱼网430向上转动,因此,本技术可通过第二电机441驱动捞鱼网430翻转,其结构简单,运行可靠,第二电机441远离捞鱼杆420的下端,不易被水打湿。
41.在一具体的实施例中,移动机构500包括纵移机构510和横移机构520,纵移机构510包括固定于抓鱼室110顶部的纵向导轨511、安装在纵向导轨511两端的第二传动轮512、套设于两第二传动轮512之间的第二传送带513、用于驱动任一第二传动轮512转动的第三电机514以及滑动安装于纵向导轨511上并固定于第二传送带513的第二滑座515。横移机构520包括横向导轨521、安装在横向导轨521两端的第三传动轮522、套设于两第三传动轮522之间的第三传送带523、用于驱动任一第三传动轮522转动的第四电机524以及滑动安装于横向导轨521上并固定于第三传送带523的第三滑座525。横向导轨521固定于第二滑座515上,升降机构410固定于第三滑座525上。
42.采用上述结构,第三电机514转动时,可通过第二传动轮512带动第二传送带513转动,从而驱动横移机构520纵向移动,第四电机524转动时,可通过第三传动轮522带动第三传送带523转动,从而驱动抓鱼机构400横向移动,因此,本技术可通过控制第三电机514来驱动抓鱼机构400纵向移动,同时通过控制第四电机524来驱动抓鱼机构400横向移动,实现抓鱼机构400在纵向上和横向上的移动。当然,在其它实施例中,纵移机构510和横移机构520也可以采用丝杠电机、电动或气动伸缩杆等驱动结构。
43.更优地,抓鱼室110的顶部设有两条分别位于纵向导轨511两侧的纵向导杆530,横向导轨521两端的上部均设有滑轮安装架531,每个滑轮安装架531上均安装有一滑轮532,各滑轮532分别滚动安装在对应的一纵向导杆530上。横向导轨521的两端分别通过滑轮532支撑在两侧的纵向导杆530上,能够起到平衡和稳定横向导轨521的作用。
44.本技术的抓鱼机构400捞鱼时,捞鱼网430没入鱼缸200内的水下,捞鱼网430的口
子朝上,玩家可通过操纵移动机构500来控制捞鱼网430在水下移动,发现鱼儿在捞鱼网430的上方时,操控升降机构410迅速向上提升捞鱼网430,从而实现捞鱼,捞鱼过程中鱼儿随时可能逃跑,存在更多的不确定性,更加惊险刺激,游戏的趣味性更强,并且抓鱼的时候也基本不会将鱼缸200内的鱼弄伤。
45.本实施例中,机体100的前侧还设有操控台140、投币口150和取币门160,操控台140上设有操纵摇杆141和捞鱼按钮142。
46.在初始状态下,捞鱼网430没入鱼缸200内的水下,捞鱼网430的口子朝上。玩家捞鱼时,需要先投币或者扫码支付,投币或者扫码支付成功后,玩家可以通过操纵摇杆141来控制移动机构500驱动抓鱼机构400前后左右移动,发现鱼儿在捞鱼网430的上方时,迅速按下捞鱼按钮142,升降机构410驱动捞鱼网430迅速上升,捞鱼网430提出鱼缸200后,系统程序自动控制移动机构500将捞鱼网430移动到下鱼口300的上方,再控制翻转机构440驱动捞鱼网430转动,若捞鱼网430内捞到鱼儿,此时捞鱼网430内的鱼儿被倒入下鱼口300,玩家从取鱼口120取走鱼儿即可,捞鱼网430翻转后,系统程序再自动控制翻转机构440驱动捞鱼网430转动复位至口子朝上,同时控制移动机构500将捞鱼网430移回至鱼缸200中间,最后再控制升降机构410驱动捞鱼网430伸入鱼缸200内,以等待下一次捞鱼操作。
47.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1