具有多杆联动机构机械道具翅膀
1.本实用新型属于舞台道具技术领域,具体涉及具有多杆联动机构机械道具翅膀。
背景技术:
2.目前国内外在舞台道具中使用的均是静态“翅膀”,在演员表演或展示中“翅膀”道具表现生硬毫无灵气可言。即便是在国际时装展中的走秀模特们所展示的高端道具“翅膀”也仅仅是在材质上有所突破,死气沉沉的“翅膀”让光鲜亮丽的模特们减分不少。
3.当然也有舞台道具师在做出改变,例如让“翅膀”通过牵引线与手臂连接,通过演员的手臂动作来控制“翅膀”的摆动。但是这种控制方式非常的原始,并不能让让“翅膀”看起来更灵动,反而会干扰演员的正常肢体动作展示。因此很多时候在排练舞蹈时不得不作出妥协。
技术实现要素:
4.本实用新型为了解决现有技术中的不足之处,提供一种设计新颖、重量轻、灵活性强的具有多杆联动机构机械道具翅膀。
5.为解决上述技术问题,本实用新型采用如下技术方案:具有多杆联动机构机械道具翅膀,包括背板,背板通过肩带和腰腹带固定在人体背部,背板后侧面固定设有电气控制盒、左电控驱动平台和右电控驱动平台,左电控驱动平台的动力输出端传动连接有左多杆摆动机构,右电控驱动平台的动力输出端传动连接有右多杆摆动机构;电气控制盒的信号输出端分别与左电控驱动平台和右电控驱动平台的信号输入端连接。
6.左电控驱动平台和右电控驱动平台的结构相同且左右对称布置;右电控驱动平台包括固定设置在背板上的第一安装架,第一安装架上设有挥翅伺服电机,挥翅伺服电机的主轴垂直朝上,挥翅伺服电机的主轴上设有第二安装架,第二安装架上设有第一展翅伺服电机,第一展翅伺服电机的主轴垂直于挥翅伺服电机的主轴,第一展翅伺服电机的主轴上安装有第三安装架,第三安装架上设有第二展翅伺服电机,第二展翅伺服电机的主轴与第一展翅伺服电机的主轴平行。
7.左多杆摆动机构和右多杆摆动机构的结构相同且左右对称布置;右多杆摆动机构包括第一杆座、第二杆座、展翅摆杆、推拉杆、第一翅杆和第二翅杆,第一杆座固定设在第三安装架顶部,第一翅杆左端固定设在第一杆座上,第一翅杆右端通过中铰链与第二杆座转动连接,第二翅杆左端固定设在第二杆座上,展翅摆杆一端铰接在第二展翅伺服电机的主轴上,展翅摆杆另一端与推拉杆左端铰接,推拉杆右端铰接在第二杆座下部,其中第一翅杆和第二翅杆上间隔设有若干铰支座,每个铰支座下部均铰接有一根羽杆,与第一翅杆连接的任意相邻两根羽杆之间均铰接设有一根第一羽动连杆,与第二翅杆连接的任意相邻两根羽杆之间均铰接设有一根第二羽动连杆。
8.第一翅杆连接的最右侧的一根羽杆与第二杆座之间铰接有一根第一斜拉杆,第二翅杆连接的最右左侧的一根羽杆与第一翅杆右端邻近中铰链的位置之间铰接有一根第二
斜拉杆。
9.第二翅杆右端固定设有第三杆座,第三杆座固定连接有两根端部羽杆。
10.左多杆摆动机构和右多杆摆动机构的所有杆件上均粘接有仿羽毛装饰件构成仿生翅膀。
11.采用上述技术方案,本实用新型的主要特点为:
12.1)、左多杆摆动机构和右多杆摆动机构(翅膀骨架)均采用三自由度设计,分别由三个伺服电机(挥翅伺服电机、第一展翅伺服电机和第二展翅伺服电机)进行驱动,可以做出展翅,竖翅和挥翅动作。每三个伺服电机安装在一起成为一组电控驱动平台。每组电控驱动平台驱动一套多杆摆动机构。
13.另外,人体的两个上臂上分别绑扎有一个手臂绑带,手臂绑带上设有用于监测手臂动作的三轴电子陀螺仪,手臂绑带内设有纽扣电池和第一通讯模块,纽扣电池盒为三轴电子陀螺仪和第一通讯模块供电。在背板后侧面固定设有电气控制盒,电气控制盒内设有蓄电池、电机驱动器、第二通讯模块和变压模块,蓄电池采用24v锂电池,变压模块为24v转5v电压模块,蓄电池分别与电机驱动器和变压模块连接,电机驱动器通过控制线分别与挥翅伺服电机、第一展翅伺服电机和第二展翅伺服电机连接,变压模块与第二通讯模块连接,第二通讯模块的信号输出端与电机驱动器的信号输入端连接,第二通讯模块的信号输入端与第一通讯模块的信号输出端无线通讯传输信号。
14.2)、左右上臂上的三轴电子陀螺仪分别通过第一无线通讯模块控制对应一边的伺服电机驱动平台,可分别控制左多杆摆动机构和右多杆摆动机构进行不同的动作。多杆摆动机构(单翅)上的羽杆采用多杆机构控制,可以跟随翅杆运动。多杆摆动机构设计合理,动作灵活。
15.3)、以碳纤维材料为主,高分子复合材料为辅制作翅膀骨架,整个翅膀骨架自重不超过2公斤,十分轻便。
16.本实用新型中的右电控驱动平台驱动右多杆摆动机构进行展翅的动作由第二展翅伺服电机完成,第二展翅伺服电机驱动展翅摆杆转动,展翅摆杆驱动推拉杆,推拉杆驱动第二翅杆以中铰链为支点转动,第二杆座也随之转动,与第二杆座连接的第一斜拉杆带动第一翅杆连接的所有羽杆展开,同时通过第二斜拉杆带动与第二翅杆连接的端部羽杆和所有羽杆均展开,从而实现展翅动作。第一斜拉杆、第二斜拉杆起到联动第一翅杆和第二翅杆上的羽杆同步伸展或缩回的作用。羽动连杆在展翅过程中起到联动所有羽杆的作用。
17.右电控驱动平台驱动右多杆摆动机构进行竖翅的动作由第一展翅伺服电机完成,第一展翅伺服电机带动第三安装架向上转动,由于第一杆座和第二展翅伺服电机均设置在第三安装架上,因此,第一展翅伺服电机可带动整个右多杆摆动机构向上转动实现竖翅动作。
18.右电控驱动平台驱动右多杆摆动机构进行挥翅的动作由挥翅伺服电机完成,挥翅伺服电机带动第二安装架前后摆动,即挥翅伺服电机带动整个右多杆摆动机构前后摆动,从而实现挥翅动作。
19.综上所述,本实用新型原理科学、结构简单、传动合理可靠,提供一种可穿戴的舞台道具,采用三轴电子陀螺仪通过无线通讯的方式控制三个伺服电机动作,驱动多杆摆动机构模拟道具“翅膀”的各种动作。让原本生硬的舞台道具瞬间变得灵动起来。本实用新型
非常适合t台走秀的模特,舞台演员和cosplay爱好者使用。拥有广阔的市场应用前景。
附图说明
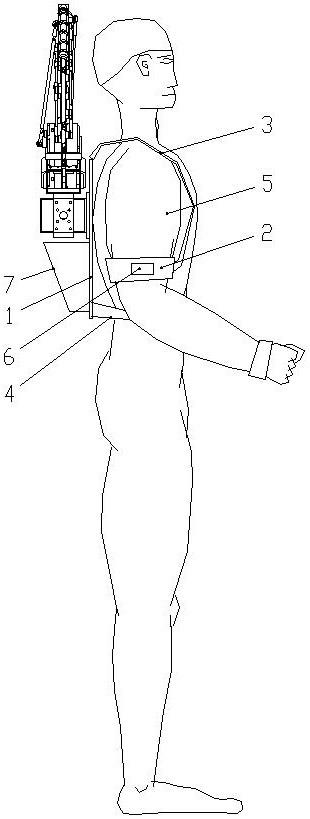
20.图1是本实用新型穿戴在背部时的侧视图;
21.图2是本实用新型的翅膀在展开时的立体的结构示意图;
22.图3是本实用新型的翅膀在展开时的平面的结构示意图;
23.图4是本实用新型的翅膀在回缩时的立体结构示意图;
24.图5是本实用新型的翅膀在回缩时的平面结构示意图。
具体实施方式
25.如图1-图5所示,本实用新型的具有多杆联动机构机械道具翅膀,包括背板1,背板1通过肩带3和腰腹带4固定在人体背部,背板1后侧面固定设有左电控驱动平台和右电控驱动平台,左电控驱动平台的动力输出端传动连接有左多杆摆动机构,右电控驱动平台的动力输出端传动连接有右多杆摆动机构,左多杆摆动机构和右多杆摆动机构上分别设置有防羽毛装饰件构成仿生翅膀。
26.左电控驱动平台和右电控驱动平台的结构相同且左右对称布置;右电控驱动平台包括固定设置在背板1上的第一安装架8,第一安装架8上设有挥翅伺服电机9,挥翅伺服电机9的主轴垂直朝上,挥翅伺服电机9的主轴上设有第二安装架10,第二安装架10上设有第一展翅伺服电机11,第一展翅伺服电机11的主轴垂直于挥翅伺服电机9的主轴,第一展翅伺服电机11的主轴上安装有第三安装架12,第三安装架12上设有第二展翅伺服电机13,第二展翅伺服电机13的主轴与第一展翅伺服电机11的主轴平行。
27.左多杆摆动机构和右多杆摆动机构的结构相同且左右对称布置;右多杆摆动机构包括第一杆座14、第二杆座15、展翅摆杆16、推拉杆17、第一翅杆18和第二翅杆19,第一杆座14固定设在第三安装架12顶部,第一翅杆18左端固定设在第一杆座14上,第一翅杆18右端通过中铰链20与第二杆座15转动连接,第二翅杆19左端固定设在第二杆座15上,展翅摆杆16一端铰接在第二展翅伺服电机13的主轴上,展翅摆杆16另一端与推拉杆17左端铰接,推拉杆17右端铰接在第二杆座15下部,其中第一翅杆18和第二翅杆19上间隔设有若干铰支座21,每个铰支座21下部均铰接有一根羽杆22,与第一翅杆18连接的任意相邻两根羽杆22之间均铰接设有一根第一羽动连杆23,与第二翅杆19连接的任意相邻两根羽杆22之间均铰接设有一根第二羽动连杆24。
28.第一翅杆18连接的最右侧的一根羽杆22与第二杆座15之间铰接有一根第一斜拉杆25,第二翅杆19连接的最右左侧的一根羽杆22与第一翅杆18右端邻近中铰链20的位置之间铰接有一根第二斜拉杆26。
29.第二翅杆19右端固定设有第三杆座27,第三杆座27固定连接有两根端部羽杆28。
30.另外,人体的两个上臂5上分别绑扎有一个手臂绑带2,手臂绑带2上设有用于监测手臂动作的三轴电子陀螺仪6,手臂绑带2内设有纽扣电池和第一通讯模块,纽扣电池盒为三轴电子陀螺仪6和第一通讯模块供电。在背板1后侧面固定设有电气控制盒7,电气控制盒7内设有蓄电池、电机驱动器、第二通讯模块和变压模块,蓄电池采用24v锂电池,变压模块为24v转5v电压模块,蓄电池分别与电机驱动器和变压模块连接,电机驱动器通过控制线分
别与挥翅伺服电机、第一展翅伺服电机和第二展翅伺服电机连接,变压模块与第二通讯模块连接,第二通讯模块的信号输出端与电机驱动器的信号输入端连接,第二通讯模块的信号输入端与第一通讯模块的信号输出端无线通讯传输信号。三轴电子陀螺仪6、第一通讯模块和电气控制盒7内的的各个器件均为现有技术,市场上可购置,因此具体结构不再赘述。另外,通过三轴电子陀螺仪6实时监测的动作信号传输及通过电机驱动器控制伺服电机动作的过程也不涉及新的计算机程序。
31.本实用新型中的翅杆、羽杆22、羽动连杆均采用碳纤维管制作,铰接零件均采用高分子复合材料制作,铰接零件通过粘合剂与对应连接件粘接到一起。
32.本实用新型的技术方案具有以下主要特点:
33.1)、左多杆摆动机构和右多杆摆动机构(翅膀骨架)均采用三自由度设计,分别由三个伺服电机(挥翅伺服电机9、第一展翅伺服电机11和第二展翅伺服电机13)进行驱动,可以做出展翅,竖翅和挥翅动作。每三个伺服电机安装在一起成为一组电控驱动平台。每组电控驱动平台驱动一套多杆摆动机构。左、右手臂上各设置有一个三轴电子陀螺仪6,每一边三轴电子陀螺仪6分别通过第一无线通讯模块控制对应一边的伺服电机驱动平台,可分别控制左多杆摆动机构和右多杆摆动机构进行不同的动作。
34.2)、多杆摆动机构(单翅)上的羽杆22采用多杆机构控制,可以跟随翅杆运动。多杆摆动机构设计合理,动作灵活。
35.3)、以碳纤维材料为主,高分子复合材料为辅制作翅膀骨架,整个翅膀骨架自重不超过2公斤,十分轻便,在翅杆和羽杆22上粘贴由珍珠棉做成的防羽毛装饰件完成可穿戴电控仿生翅膀的制作。
36.本实用新型中的右电控驱动平台驱动右多杆摆动机构进行展翅的动作由第二展翅伺服电机13完成,第二展翅伺服电机13驱动展翅摆杆16转动,展翅摆杆16驱动推拉杆17,推拉杆17驱动第二翅杆19以中铰链20为支点转动,第二杆座15也随之转动,与第二杆座15连接的第一斜拉杆25带动第一翅杆18连接的所有羽杆22展开,同时通过第二斜拉杆26带动与第二翅杆19连接的端部羽杆28和所有羽杆22均展开,从而实现展翅动作。第一斜拉杆25、第二斜拉杆26起到联动第一翅杆18和第二翅杆19上的羽杆22同步伸展或缩回的作用。羽动连杆在展翅过程中起到联动所有羽杆22的作用。
37.右电控驱动平台驱动右多杆摆动机构进行竖翅的动作由第一展翅伺服电机11完成,第一展翅伺服电机11带动第三安装架12向上转动,由于第一杆座14和第二展翅伺服电机13均设置在第三安装架12上,因此,第一展翅伺服电机11可带动整个右多杆摆动机构向上转动实现竖翅动作。
38.右电控驱动平台驱动右多杆摆动机构进行挥翅的动作由挥翅伺服电机9完成,挥翅伺服电机9带动第二安装架10前后摆动,即挥翅伺服电机9带动整个右多杆摆动机构前后摆动,从而实现挥翅动作。
39.本实施例并非对本实用新型的形状、材料、结构等作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均属于本实用新型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1