用于动力行走设备的下肢连接装置的制作方法
1.本实用新型涉及虚拟现实(vr)原地行走装置技术领域,尤其涉及一种用于动力行走设备的下肢连接装置。
背景技术:
2.随着科技的不断发展,产生了虚拟现实(virtual reality),简称vr技术,是利用计算机模拟产生一个三维空间的虚拟世界,为使用者提供视觉、听觉、触觉等多种感官的模拟,从而创造出身临其境的感觉。使用者借助虚拟现实技术可以在计算机产生的各种虚拟场景中任意漫游,对于各个产业来说,将虚拟现实与实际应用场景结合起来已经成为非常有前景的发展方向。
3.但是在实际应用中,不可能为vr使用者提供无限制的大面积场地进行活动,因此诞生了万向行动平台技术,万向跑步机是其中的主要技术类型。万向跑步机能够实现使用者全方向行走和跑步并自由转身,其中以omni为代表的无动力滑动型,在使用过程中需将使用者的腰部固定,以腰部承受阻力,双脚穿特制鞋在光滑的凹面台上滑动模拟行走,虽然占地面积较小,但是只适合定向滑动,侧向滑动困难,双腿很难直线行走,极大地降低了虚拟的沉浸体验。以“无限甲板”为代表的主动式万向跑步机使用数量很多、尺寸较小的由电动机驱动的复位装置组成,能实现使用者自然步态行走和自由转身,但是结构复杂、成本高,大量运动部件产生很大的运动惯量,在使用者急动、急停和快速改变运动方向时响应速度较慢,影响体验感。综上所述,万向行动平台需要占用一定的空间,体积较大不便于移动,往往需要专门的房间安置,不利于推广普及与使用。
4.以ekto one为代表的双脚穿戴式鞋形原地行走设备,有电动机和电池,电池为电动机供电,电动机驱动设备向双脚行走动作的相反方向运动,实现原地行走,其缺点是重量是普通靴子的几倍,使用者容易产生疲劳感。
5.专利cn106267792b提出的动力鞋方案,驱动装置具有使用者足部踩踏状态与不踩踏状态,实现驱动力切换功能。即使用者足部踩踏时,专利cn106267792b的动力鞋的驱动轮与承载动力鞋的物体上表面接触,带动使用者足部移动,使用者足部不踩踏时,动力鞋不对使用者足部施加力。此专利没有解决使用者足部不踩踏在动力鞋时,动力鞋与使用者下肢动作与位置协同问题,无法跟随使用者足部完成原地行走动作。
6.以专利cn2552567y为例,此类专利只具有带动踩踏在其上的使用者足部移动功能,等同于电动旱冰鞋,无法实现驱动力切换和原地行走功能。
技术实现要素:
7.为解决上述问题,本实用新型提出一种用于动力行走设备的下肢连接装置。本实用新型用于连接具有原地行走功能的动力行走设备和只具备动力驱动功能的足部承载设备(如电动轮滑鞋)。
8.本实用新型设置的具有活动机械结构的活动连接机构将动力行走设备与使用者
下肢的膝关节以下部位连接,实现使用者足部不踩踏在动力行走设备上时,下肢通过机械结构连接并带动动力行走设备在承载所述动力行走设备的物体上表面(如地面)移动,动力行走设备始终被动保持在使用者双足下方,使用者双足落下时踩踏在动力行走设备上,由动力行走设备带动使用者足部向使用者行走动作的相反方向移动,使用者双足不承受动力行走设备的重量而实现原地行走。通过本实用新型设置的抬升组件,可使无驱动力切换功能的动力行走设备(如电动轮滑鞋)实现原地行走功能。
9.本实用新型动力行走设备的下肢连接装置包括:活动连接机构(1)、下肢连接部件(21),所述活动连接机构设置下肢连接部件,下肢连接部件用于连接动力行走设备(3)的使用者的膝关节以下部位,活动连接机构与动力行走设备连接,活动连接机构具有活动机械结构或活动部件(13),所述下肢连接部件随所述使用者的膝关节以下部位运动,并带动所述活动连接机构的所述活动机械结构或所述活动部件运动,所述活动连接机构带动所述动力行走设备在承载所述动力行走设备的物体(51)上表面移动,所述下肢连接部件可相对于所述活动连接机构连接的所述动力行走设备在至少一个方向改变距离。
10.本实用新型的下肢连接部件(21)与使用者足部或鞋(5)连接,下肢连接部件也可以与使用者小腿部(6)连接。所述下肢连接部件包括:绑带,所述绑带的材质包括:具有弹性的材质。
11.本实用新型的活动连接机构(1)的活动机械结构包括:滑动结构、伸缩结构、折叠结构中的至少一种,所述折叠结构包括剪式折叠结构(14)。
12.本实用新型的其中一个实施例中,活动连接机构(1)的所述活动部件(13)包括:滑动部件,所述滑动部件设置在所述滑动结构。
13.本实用新型的其中一个实施例中设置传感装置和控制装置,所述传感装置检测的对象包括:所述活动连接机构(1)、所述活动部件(13)、所述使用者的膝关节以下部位中的一种或两种或全部,所述传感装置信息发送的对象包括:所述控制装置,所述控制装置控制的对象包括:所述动力行走设备(3)。
14.本实用新型的活动连接机构(1)与所述动力行走设备(3)连接的方式可包括:螺丝(41)、绑带(46)、卡扣(45)中的至少一种。
15.本实用新型的其中一个实施例中,活动连接机构(1)设置抬升组件(7),所述抬升组件用于将所述动力行走设备(3)整体抬升,使所述动力行走设备不接触承载所述动力行走设备的物体(51)上表面,所述抬升组件包括:抬升部件(70)、支撑部件(71),所述抬升部件与所述支撑部件之间设置具备一定弹性变形能力的弹性体(91),所述支撑部件包括:轮子,所述弹性体包括:弹簧,所述轮子包括:万向脚轮。
16.进一步地,活动连接机构(1)与抬升部件(70)活动连接,所述活动连接方式包括:滑动连接。
17.进一步地,本实用新型的抬升部件(70)可设置动力装置(301),所述动力装置连接并驱动轮子(35)转动。可设置多个动力装置(301),多个所述动力装置驱动多个所述轮子(35)转动,对所述抬升部件施加多方向作用力。
18.进一步地,本实用新型的传感装置检测的对象可包括:所述抬升组件(7),所述控制装置控制的对象包括:所述动力装置(301)。
附图说明
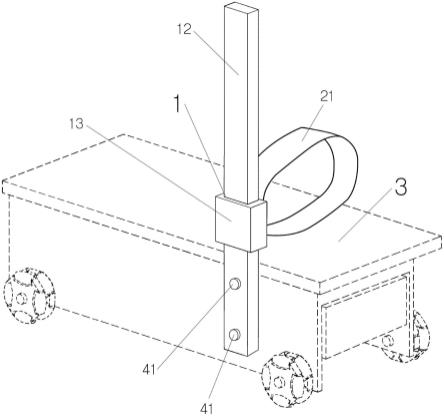
19.图1是本实用新型与动力行走设备连接状态示意图。
20.图2是本实用新型的下肢连接部件与动力行走设备使用者足部或鞋连接示意图。
21.图3是本实用新型的下肢连接部件与动力行走设备使用者小腿部连接示意图。
22.图4a、图4b、图4c是本实用新型的活动连接机构的三种活动机械结构实施例。
23.图5a、图5b是本实用新型的活动连接机构与使用者下肢协同动作示意图。
24.图6是本实用新型的活动连接机构与动力行走设备以卡扣连接示意图。
25.图7是本实用新型的活动连接机构与动力行走设备以螺丝和绑带连接示意图。
26.图8是本实用新型的活动连接机构设置抬升组件结构示意图。
27.图9a、图9b是本实用新型的活动连接机构设置的抬升组件与使用者下肢协同动作示意图。
28.图10是本实用新型的活动连接机构与抬升组件活动连接的实施例示意图。
29.图11是本实用新型的活动连接机构的抬升组件设置动力装置示意图。
30.图12是本实用新型的活动连接机构的抬升组件设置多个动力装置示意图。
具体实施方式
31.下面结合附图和实施例对本实用新型进行说明,实施例的内容不作为对本实用新型保护范围的限制。
32.附图1是本实用新型与动力行走设备连接状态示意图。如附图1所示,本实用新型的活动连接机构1具有固定部件12、活动部件13,活动部件13与下肢连接部件21连接,下肢连接部件21用于连接使用者膝关节以下部位。固定部件12与动力行走设备3连接,进一步地,固定部件12与动力行走设备3以2个螺丝41连接。活动部件13与固定部件12滑动连接,活动部件13沿固定部件12滑动,活动部件13与下肢连接部件21同步运动。
33.附图2是本实用新型的下肢连接部件21与使用者膝关节以下部位连接的实施例。如附图2所示,活动连接机构1的固定部件12与动力行走设备3连接,固定部件12设置活动部件13,活动部件13与下肢连接部件21连接。进一步地,下肢连接部件21是绑带,下肢连接部件21束缚在使用者足部或鞋5上,将使用者足部或鞋5固定在活动部件13上,实现活动部件13随使用者足部或鞋5运动,活动部件13与使用者足部或鞋5在固定部件12上同步运动。
34.附图3是本实用新型的下肢连接部件21与使用者膝关节以下部位连接的另一种实施例。如附图3所示,活动连接机构1的固定部件12与动力行走设备3连接,固定部件12设置活动部件13,活动部件13与下肢连接部件21连接。进一步地,下肢连接部件21是绑带,下肢连接部件21束缚在使用者小腿部6上,将使用者小腿部6固定在活动部件13上,实现活动部件13随使用者小腿部6活动,活动部件13与使用者小腿部6在固定部件12上同步运动。
35.附图4a、附图4b、附图4c是本实用新型的活动连接机构的三种活动机械结构的实施例。如附图4a所示,活动连接机构1是滑动结构,活动连接机构1具有固定部件12和活动部件13,进一步地,活动部件13是滑动部件。活动部件13与下肢连接部件21连接,活动部件13与下肢连接部件21在固定部件12上同步滑动。固定部件12用于连接动力行走设备,下肢连接部件21用于连接使用者膝关节以下部位。
36.如附图4b所示,活动连接机构1是伸缩结构,活动连接机构1具有固定部件12和活
动部件13,活动部件13与下肢连接部件21连接。活动部件13可伸出固定部件12外部或缩进固定部件12内部,活动部件13与下肢连接部件21在固定部件12上伸缩运动。固定部件12用于连接动力行走设备,下肢连接部件21用于连接使用者膝关节以下部位。
37.如附图4c所示,活动连接机构1是折叠结构,活动连接机构1具有固定部件12和活动机械结构14,进一步地,活动机械结构14是剪式折叠结构。活动机械结构14与下肢连接部件21连接,活动机械结构14的剪式折叠结构可在图中的上下方向折叠或展开,下肢连接部件21可随活动机械结构14运动。固定部件12用于连接动力行走设备,下肢连接部件21用于连接使用者膝关节以下部位。
38.本说明书以附图4a的滑动结构作为实施例说明。
39.附图5a、附图5b是本实用新型的活动连接机构与使用者下肢协同动作示意图。如附图5a所示,活动连接机构1的固定部件12与动力行走设备3连接。固定部件12设置的活动部件13与下肢连接部件21连接,下肢连接部件21与使用者足部或鞋5连接(见附图2所示)。活动部件13与使用者足部或鞋5同步动作,使用者足部或鞋5相对于动力行走设备3可在图中上下方向运动,使用者足部或鞋5对活动部件13施加的力通过固定部件12传递给动力行走设备3,使用者足部或鞋5可带动动力行走设备3在承载动力行走设备3的物体表面(如地面)移动。
40.如附图5b所示,活动连接机构1的固定部件12设置的活动部件13与下肢连接部件21连接,下肢连接部件21与使用者足部或鞋5连接(见附图2所示)。使用者足部或鞋5踩踏在动力行走设备3上,动力行走设备3带动使用者足部或鞋5在承载动力行走设备3的物体表面(如地面)移动。
41.实际实施中,使用者足部或鞋5抬起,使用者向前迈步,使用者足部或鞋5通过活动连接机构1带动动力行走设备3移动,动力行走设备3在移动过程中保持在使用者足部或鞋5下方,使用者足部或鞋5落下时踩踏在动力行走设备3上,动力行走设备3带动使用者足部或鞋5向使用者迈步动作方向的相反方向移动,使用者双足交替上述动作,与使用者双腿的膝关节以下部位连接的活动连接机构1带动两个动力行走设备3实现原地行走。
42.进一步地,本实用新型可设置传感装置和控制装置。传感装置检测的对象可包括:使用者足部或鞋5、活动部件13、动力行走设备3中的至少一个。控制装置控制的对象包括:动力行走设备3,进一步地,控制装置控制动力行走设备3的动力装置。传感装置检测活动部件13的运动方向,因为活动部件13与使用者足部或鞋5连接且同步运动,通过检测活动部件13可获得使用者足部或鞋5的动作信息,进一步地,检测的信息包括:使用者足部或鞋5是否踩踏在动力行走设备3上和使用者足部或鞋5的水平运动方向。实际实施中,使用者足部或鞋5抬起,未踩踏动力行走设备3上,传感装置通过检测活动部件13的运动,将检测信息发送到控制装置,控制装置控制动力行走设备3的动力装置带动驱动装置,使与使用者抬起的足部或鞋5连接的动力行走设备3向使用者迈步方向同步移动,进一步地,传感装置检测动力行走设备3与使用者足部或鞋5两者的速度,将检测信息发送到控制装置,控制装置控制动力行走设备3的动力装置驱动动力行走设备3的移动速度与使用者足部或鞋5在水平方向的移动速度相同。使用者足部或鞋5落下,踩踏在动力行走设备3上,传感装置通过检测活动部件13的运动,将检测信息发送到控制装置,控制装置控制动力行走设备3的动力装置带动驱动装置,驱动使用者足部或鞋5踩踏的动力行走设备3向使用者迈步方向的相反方向移动。
使用者双腿的膝关节以下部位分别连接的两个动力行走设备3配合使用者左右下肢交替进行上述动作,实现使用者原地行走。
43.附图6是本实用新型的活动连接机构与动力行走设备以卡扣连接的实施例。如附图6所示,活动连接机构1的固定部件12设置2个卡扣45,卡扣45卡在动力行走设备3上,将活动连接机构1与动力行走设备3连接。进一步地,卡扣45的材质是高弹性钢。
44.附图7是本实用新型的活动连接机构与动力行走设备以螺丝和绑带连接实施例。如附图7所示,活动连接机构1的固定部件12设置绑带46和2个螺丝41,绑带46束缚在动力行走设备3上,将活动连接机构1与动力行走设备3固定,螺丝41将固定部件12与动力行走设备3固定。进一步地,绑带46的材质具有弹性。
45.附图8是本实用新型的活动连接机构设置抬升组件实施例。如附图8所示,活动连接机构1的固定部件12与动力行走设备3连接,活动连接机构1设置抬升组件7。活动连接机构1的固定部件12与抬升组件7的抬升部件70连接,抬升部件70与动力行走设备3接触。抬升组件7设置3个支撑部件71,进一步地,3个支撑部件71是万向脚轮。支撑部件71与抬升部件70之间设置3个弹性体91,弹性体91对3个支撑部件71与抬升部件70施加方向相反的力,进一步地,3个弹性体91是弹簧。
46.附图9a和附图9b是本实用新型的活动连接机构设置的抬升组件与使用者下肢协同动作示意图。如附图9a所示,活动连接机构1的固定部件12与抬升组件7的抬升部件70连接,活动连接机构1的活动部件13与下肢连接部件21连接,下肢连接部件21将使用者足部或鞋5固定在活动部件13上,活动部件13随用者足部或鞋5运动。抬升组件7的支撑部件71与承载动力行走设备3的物体51接触,支撑部件71与抬升部件70之间设置弹性体91,进一步地,弹性体91是弹簧。如附图9a所示,使用者足部或鞋5未踩踏在动力行走设备3上,抬升部件70与动力行走设备3接触,弹性体91的弹力将抬升部件70和动力行走设备3抬升,使动力行走设备3的轮子31、32不接触承载动力行走设备3的物体51。
47.如附图9b所示,活动连接机构1的固定部件12与抬升组件7的抬升部件70连接,活动连接机构1的活动部件13与下肢连接部件21连接,下肢连接部件21将使用者足部或鞋5固定在活动部件13上,活动部件13随使用者足部或鞋5运动。抬升组件7的支撑部件71与承载动力行走设备3的物体51接触,支撑部件71与抬升部件70之间设置弹性体91,进一步地,弹性体91是弹簧。如附图9b所示,使用者足部5踩踏在动力行走设备3上,抬升部件70与动力行走设备3接触,动力行走设备3带动抬升部件70向承载动力行走设备3的物体51运动,弹性体91的弹力将支撑部件71推向承载动力行走设备3的物体51,动力行走设备3的轮子31、32接触承载动力行走设备3的物体51。
48.在实际实施中,附图9a和附图9b所示实施例可实现只具备简单的动力驱动功能的动力行走设备(如电动轮滑鞋)实现原地行走,不需要如附图5a和附图5b所示的实施例中,需根据使用者足部或鞋5的动作方向控制动力行走设备3的移动方向才能实现使用者原地行走。
49.如附图9a所示,使用者足部5抬起,未踩踏在动力行走设备3上,动力行走设备3接触的抬升部件70受到弹性体91的弹力,抬升组件7的支撑部件71支撑抬升组件7和动力行走设备3,抬升部件70推动动力行走设备3抬升,动力行走设备3的轮子31、32不接触承载动力行走设备3的物体51,进一步地,不需要对动力行走设备3的驱动装置进行控制,使用者足部
5抬起时,所连接的动力行走设备3和抬升组件7,随使用者足部5的动作移动,轮子31、32的转动不会影响使用者做出迈步等动作。
50.如附图9b所示,使用者足部5落下,踩踏在动力行走设备3,与动力行走设备3接触的抬升部件70向图中下方运动,推动动力行走设备3同步向图中下方运动,动力行走设备3的轮子31、32接触到承载动力行走设备3的物体51,动力行走设备3驱动轮子31、32转动,带动动力行走设备3和抬升组件7带动使用者足部5向使用者行走动作的相反方向移动。
51.进一步地,传感装置检测动力行走设备3或抬升组件7的运动距离和运动速度,将检测信息发送到控制装置,控制装置控制动力行走设备3的驱动装置,使动力行走设备3在使用者足部或鞋5踩踏时的移动速度,与连接使用者抬起的足部或鞋5的动力行走设备3的移动速度相同,实现动力行走设备3带动使用者足部向使用者行走动作方向的相反方向的移动速度,与使用者迈步的速度相同,将使用者的位置维持在一定范围内。
52.附图10是本实用新型的活动连接机构与抬升组件活动连接的实施例。如附图10所示,活动连接机构1的固定部件12与动力行走设备3连接,活动连接机构1设置抬升组件7。活动连接机构1的固定部件12与滑动部件75、76活动连接,进一步地,固定部件12与滑动部件75、76滑动连接,滑动部件75、76与抬升组件7的抬升部件70连接,抬升部件70与动力行走设备3接触。抬升组件7设置3个支撑部件71,进一步地,3个支撑部件71是万向脚轮。动力行走设备3与抬升部件70之间设置3个弹性体91,3个弹性体91对动力行走设备3与抬升部件70施加方向相反的力,进一步地,弹性体91是弹簧。当使用者足部或鞋5未踩踏在动力行走设备3上,弹性体91的弹力将动力行走设备3向图中上方推动。
53.附图11是本实用新型的活动连接机构的抬升组件设置动力装置实施例。如附图11所示,抬升组件7的抬升部件70设置动力装置301,动力装置301连接轮子35,轮子35支撑抬升部件70。进一步地,轮子35是连续切换轮。进一步地,控制装置控制动力装置301的转动方向和速度。进一步地,传感装置检测动力行走设备3和使用者足部或鞋5的运动方向和速度,将检测信息发送至控制装置,控制装置控制动力装置301驱动轮子35的转动方向与抬起的使用者足部或鞋5的动作方向相同,减小动力行走设备3和抬升组件7对使用者下肢动作造成的阻力。
54.附图12是本实用新型的活动连接机构的抬升组件设置多个动力装置实施例。如附图12所示,抬升组件7的抬升部件70设置2个动力装置301,2个动力装置301分别连接轮子35并驱动轮子35转动。进一步地,轮子35是连续切换轮。进一步地,轮子35支撑抬升部件70。进一步地,控制装置控制动力装置301的转动方向和速度。进一步地,控制装置控制动力装置301驱动轮子35的转动方向与抬起的使用者足部或鞋5的动作方向相同,减小动力行走设备3和抬升组件7对使用者下肢动作造成的阻力。
55.本说明书所描述的实施例仅是本实用新型的一部分实施例,而不是全部实施例。基于本实用新型中的实施例,本领域技术人员在未作出创造性劳动前提下获得的所有其他实施例都属于本实用新型保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1