一种积木机器人交互控制组合体的制作方法
1.本实用新型涉及积木机器人技术领域,具体涉及一种积木机器人交互控制组合体。
背景技术:
2.积木式编程在青少年教育领域得到越来越多的使用,该技术可以让青少年通过类似拼接积木的方式实现软件逻辑的设计,寓教于乐;有的还内嵌了传感器组件,可以直接调用设备的功能,从而降低软件开发难度和要求。
3.拼接积木使用时学习更直观,通过积木块拼装的电子变成装置可应用于现实生活中,可用做中小学生的课外活动教材,也可作为电子技术的实验指导。积木块拼接由浅入深,可快速拼装出各种趣味电路与实用电路,每拼装一种电路,都能马上听到或看到通过电子积木组装而成的积木电路产生的声、光和电的效果。
4.现有技术中积木模块在注塑、组装等加工过程中容易产生误差,从而容易导致积木模块之间的连接不稳定甚至连接过程中脱落,也仍然不能克服体积大、且需要使用连接线等问题,也无法避免电极反接(造成短路),存在一定的安全隐患。除此之外,编程积木块输入结构在对应的逻辑条件越多是,修改和维护都相当困难。
技术实现要素:
5.因此,本实用新型要解决的技术问题在于克服现有技术中搭建和控制局限性的缺陷,从而提供一种积木机器人交互控制组合体。
6.本实用新型的上述技术目的是通过以下技术方案得以实现的:
7.一种积木机器人交互控制组合体,包括若干个呈中空设置可拆装的积木组件,所述积木组件包括:
8.连接积木块,所述连接积木块包括卡接积木块、铰接积木块和磁性积木块,所述连接积木块上均设有金属弹性触点,所述连接积木块与移动积木块连接;
9.移动积木块,所述移动积木块包括滑移积木块和转动积木块,所述移动积木块与控制积木块通信连接且与连接积木块活动连接;
10.控制积木块,所述控制积木块内包括主控制器、存储单元、输入输出单元、传感器接口和通信接口,所述主控制器与输入输出单元、传感器接口和通信接口连接。
11.通过采用上述技术方案,使用不同类型的积木块进行搭建组装,降低搭建的局限性,可以由不同积木块拓展出不同结构,同时可以直接操作的控制积木块进行预定程序的设置或者根据主控制器和传感器进行周围状态信息分析,实时实现控制,将程序控制与智能控制相结合,增大控制范围。
12.进一步的,所述卡接积木块在相对端面上分别设有凸出圆台和凹孔,所述凸出圆台与凹孔配合设置,所述凸出圆台和凹孔中心内均设有金属弹性触点,所述金属弹性触点间相互配合通过电连接。
13.通过采用上述技术方案,凸出圆台和凹孔的配合从而实现卡接,在凸出圆台和凹孔中心内设有金属弹性触点,通过金属弹性触点之间的接触实现电路畅通。
14.进一步的,所述铰接积木块包括第一连接体和球连接体,所述第一连接体内设有卡槽,所述卡槽与凸出圆台相对应,所述卡槽内也设有金属弹性触点,所述球连接体上还设有贯穿球心的通孔。
15.通过采用上述技术方案,第一连接体和球连接体分别连接不同积木块,从而实现积木块运动的转变,通孔便于不同的输出轴进行穿设。
16.进一步的,所述磁性积木块上一个面设有磁性块,所述磁性积木块上还设有至少一个金属弹性触点,所述磁性积木块还包括有显示屏。
17.通过采用上述技术方案,设置磁性积木块与控制积木块连接,从而用于显示内部电路连通情况,同时也便于进行故障分析。
18.进一步的,所述滑移积木块内设有滑移电机,所述转动积木块内设有舵机,所述滑移积木块和转动积木块外表面均设有供输出轴伸出的输出缺口,所述移动积木块内均单独设有电源装置。
19.通过采用上述技术方案,滑移积木块和转动积木块之间的配合,能够实现大部分运动,从而降低了机器人运动的局限性,积木块外表面的输出缺口不影响物体的运动,单独设置的电源装置便于单独控制运动组件。
20.进一步的,所述传感器接口设置有多个,所述主控制器还连接有力觉传感器、触觉传感器和视觉传感器,所述力觉传感器、触觉传感器和视觉传感器设在移动积木块上。
21.通过采用上述技术方案,使用力觉传感器、触觉传感器和视觉传感器在运动过程中获得周围状态信息,能够实时确定控制,降低控制的局限性。
22.进一步的,所述力觉传感器、触觉传感器和视觉传感器通过通信接口与主控制器连接,所述通信接口为无线模块且包括串行接口和并行接口。
23.通过采用上述技术方案,使用通信接口连接减少有限连接的麻烦,避免线路缠绕影响运动,串行接口和并行接口的存在便于机器人与其他设备进行数据交换。
24.进一步的,所述力觉传感器、触觉传感器和视觉传感器的数据经过通信接口传递至输入输出单元,所述输入输出单元进行数据转换并将数据存储至存储单元,所述存储单元内还设有示教模块。
25.通过采用上述技术方案,在存储单元内设置示教模块,有利于机器人在遇到相同条件情况下进行同样操作,减少人工控制的麻烦,提升机器人的智能性。
26.综上所述,本实用新型技术方案,具有如下优点:
27.1.本实用新型提供的积木机器人交互控制组合体,使用不同类型的积木块进行搭建组装,降低搭建的局限性,可以由不同积木块拓展出不同结构,同时可以直接操作的控制积木块进行预定程序的设置或者根据主控制器和传感器进行周围状态信息分析,实时实现控制,将程序控制与智能控制相结合,增大控制范围。
28.2.本实用新型提供的积木机器人交互控制组合体,使用力觉传感器、触觉传感器和视觉传感器在运动过程中获得周围状态信息,能够实时确定控制,降低控制的局限性。
29.3.本实用新型提供的积木机器人交互控制组合体,在存储单元内设置示教模块,有利于示教机器人的工作轨迹和参数设定,减少人工控制的麻烦,便于人机交互操作。
附图说明
30.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
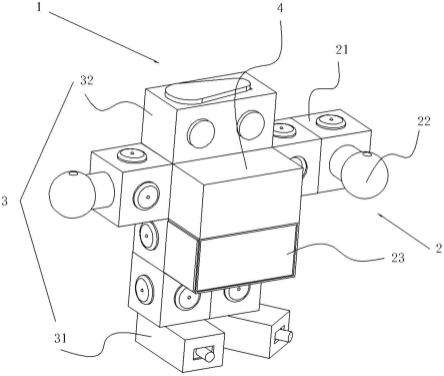
31.图1为本实用新型的一种实施方式中提供的一种积木机器人交互控制组合体的整体结构示意图;
32.图2为本实用新型的一种实施方式中提供的一种积木机器人交互控制组合体的爆炸结构示意图;
33.图3为本实用新型一种实施方式中提供的移动积木块的剖视结构示意图;
34.图4为本实用新型一种实施方式中提供的控制积木块的结构框图。
35.附图标记说明:
36.1、积木组件;2、连接积木块;21、卡接积木块;211、凸出圆台;212、凹孔;22、铰接积木块;221、第一连接体;2211、卡槽;222、球连接体;2221、通孔;23、磁性积木块;231、磁性块;232、显示屏;24、金属弹性触点;3、移动积木块;31、滑移积木块;311、滑移电机;32、转动积木块;321、舵机;33、输出缺口;34、电源装置;4、控制积木块;41、主控制器;411、力觉传感器;412、触觉传感器;413、视觉传感器;42、存储单元;421、示教模块;43、输入输出单元;44、传感器接口;45、通信接口;451、串行接口;452、并行接口。
具体实施方式
37.以下结合附图和实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
38.一种积木机器人交互控制组合体,如图1所示,包括若干个呈中空设置可拆装的积木组件1,积木组件1包括连接积木块2、移动积木块3和控制积木块4,连接积木块2包括卡接积木块21、铰接积木块22和磁性积木块23,移动积木块3包括滑移积木块31和转动积木块32,使用不同类型的积木块进行搭建组装,降低搭建的局限性,可以由不同积木块拓展出不同结构。
39.如图1和图2所示,连接积木块2上均设有金属弹性触点24,连接积木块2与移动积木块3连接,卡接积木块21在相对端面上分别设有凸出圆台211和凹孔212,凸出圆台211与凹孔212配合设置从而实现卡接,凸出圆台211和凹孔212中心内均设有金属弹性触点24,通过金属弹性触点24之间的接触实现电路畅通;铰接积木块22包括第一连接体221和球连接体222,第一连接体221内设有卡槽2211,卡槽2211与凸出圆台211相对应,卡槽2211内也设有金属弹性触点24,球连接体222上还设有贯穿球心的通孔2221,第一连接体221和球连接体222分别连接不同积木块,从而实现积木块运动的转变,通孔2221便于不同的输出轴进行穿设;磁性积木块23上一个面设有磁性块231,磁性积木块23上还设有至少一个金属弹性触点24,磁性积木块23还包括有显示屏232,设置磁性积木块23与控制积木块4连接,通过显示屏232用于显示内部电路连通情况,同时也便于进行故障分析。
40.如图2和图3所示,滑移积木块31内设有滑移电机311,转动积木块32内设有舵机321,滑移积木块31和转动积木块32外表面均设有供输出轴伸出的输出缺口33,移动积木块
3内均单独设有电源装置34,滑移积木块31和转动积木块32之间的配合,能够实现大部分运动,从而降低了机器人运动的局限性,积木块外表面的输出缺口33不影响物体的运动,单独设置的电源装置34便于单独控制运动组件。
41.如图4所示,主控制器41还连接有力觉传感器411、触觉传感器412和视觉传感器413,力觉传感器411、触觉传感器412和视觉传感器413设在移动积木块3上,力觉传感器411、触觉传感器412和视觉传感器413通过通信接口45与主控制器41连接,通信接口45为无线模块且包括串行接口451和并行接口452,使用力觉传感器411、触觉传感器412和视觉传感器413在运动过程中获得周围状态信息,从而能够实时确定控制,降低控制的局限性。力觉传感器411、触觉传感器412和视觉传感器413的数据经过通信接口45传递至输入输出单元43,输入输出单元43进行数据转换并将数据存储至存储单元42,存储单元42内还设有示教模块421,在存储单元42内设置示教模块421,有利于机器人在遇到相同条件情况下进行同样操作,减少人工控制的麻烦,提升机器人的智能性。控制积木块4既可以进行预定程序的设置,又可以根据主控制器41和传感器进行周围状态信息分析,实时实现控制。
42.本积木机器人交互控制组合体的工作原理和使用方法:根据需要或者个人喜好搭建积木组件1,将连接积木块2、移动积木块3和控制积木块4通过不同连接方式进行搭建,通过输入输出单元43在主控制器41内进行既定程序设置,又或者根据力觉传感器411、触觉传感器412和视觉传感器413进行反馈进行实时控制。
43.上述说明示出并描述了本实用新型的优选实施例,如前所述,应当理解本实用新型并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述实用新型构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本实用新型的精神和范围,则都应在本实用新型所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1