一种字母N至Z变形组合机器人玩具的制作方法
一种字母n至z变形组合机器人玩具
技术领域
1.本实用新型涉及玩具领域,具体涉及一种字母n至z变形组合机器人玩具。
背景技术:
2.玩具能发展儿童的运动能力,训练知觉,激发想象,唤起好奇心,为儿童身心发展提供了物质条件,是儿童把想象、思维等心理过程转向行为的支柱。
3.目前的变形机器人,只能在机器人和机器之间切换变形,变形样式单一,且一般只有汽车、战车等形态,教育意义不足,趣味性较差,不易锻炼儿童动手能力及逻辑思维能力,此外现有的变形机器人不易培养儿童的学习兴趣,使用起来较为不便。
技术实现要素:
4.本实用新型的目的在于提供一种字母n至z变形组合机器人玩具,解决了现有技术中变形组合玩具变形样式单一、趣味性差、教育意义不足的问题。
5.本实用新型实施例提供一种字母n至z变形组合机器人玩具,包括头部组件、肩部组件、颈部组件、躯干部组件、前胸组件、后背组件、右手组件、左手组件、第一右腿组件、第二右腿组件、第一左腿组件、第二左腿组件、右脚组件和左脚组件;
6.所述头部组件与所述颈部组件插接安装;所述颈部组件插接安装在所述肩部组件的上方;所述躯干部组件插接安装在所述肩部组件的下方;所述前胸组件插接安装在所述躯干部组件的前方;所述后背组件插接安装在所述躯干部组件的后方;所述右手组件和所述左手组件分别插接安装在所述肩部组件的右侧和左侧;所述第一右腿组件和所述第二右腿组件插接安装在所述右脚组件上,所述第一左腿组件和所述第二左腿组件插接安装在所述左脚组件;所述第一右腿组件和所述第一左腿组件分别插接安装在所述躯干部组件的右侧和左侧;
7.所述肩部组件为字母“x”造型块;所述颈部组件由字母“p”造型块变形得到;所述躯干部组件由字母“n”造型块变形得到;所述前胸组件由字母“r”造型块变形得到;所述后背组件由字母“q”造型块变形得到;所述右手组件由字母“v”造型块变形得到;所述左手组件由字母“u”造型块变形得到;所述第一右腿组件由字母“s”造型块变形得到;所述第二右腿组件由字母“y”造型块变形得到;所述第一左腿组件由字母“o”造型块变形得到;所述第二左腿组件由字母“t”造型块变形得到;所述右脚组件由字母“z”造型块变形得到;所述左脚组件由字母“w”造型块变形得到。
8.在一些实施方式中,所述肩部组件包括颈部安装孔、躯干部安装孔和两个手部安装孔。
9.在一些实施方式中,所述颈部组件包括头部连接杆和颈部连接杆;所述头部组件包括头部安装孔;所述头部连接杆与所述头部安装孔插接安装;所述颈部连接杆与所述颈部安装孔插接安装。
10.在一些实施方式中,所述躯干部组件包括躯干部连接杆、前胸安装孔和后背连接
杆;所述躯干部连接杆与所述躯干部安装孔插接安装。
11.在一些实施方式中,所述前胸组件包括前胸连接杆;所述后背组件包括后背安装孔;所述前胸连接杆与所述前胸安装孔插接安装;所述后背安装孔与所述后背连接杆插接安装。
12.在一些实施方式中,所述右手组件包括右手连接杆;所述左手组件包括左手连接杆;所述右手连接杆和所述左手连接杆分别与所述手部安装孔插接安装。
13.在一些实施方式中,所述躯干部组件包括右腿安装孔和左腿安装孔;
14.所述第一右腿组件包括右腿连接杆;所述第一左腿组件包括左腿连接杆;所述右腿安装孔和所述右腿连接杆插接安装;所述左腿安装孔和所述左腿连接杆插接安装。
15.在一些实施方式中,所述右脚组件包括第一右腿安装孔和第二右腿连接杆;所述左脚组件包括第一左腿连接杆和第二左腿连接杆。
16.在一些实施方式中,所述第一右腿组件包括第一右腿连接杆;所述第一左腿组件包括第一左腿安装孔;
17.所述第一右腿连接杆和所述第一右腿安装孔插接安装;所述第一左腿安装孔与所述第一左腿连接杆插接安装。
18.在一些实施方式中,所述第二右腿组件包括第二右腿安装孔;所述第二左腿组件包括第二左腿安装孔;
19.所述第二右腿安装孔与所述第二右腿连接杆插接安装;所述第二左腿安装孔与所述第二左腿连接杆插接安装。
20.本实用新型通过将玩具组件设计成字母造型块n至z,再通过将变形后的字母造型块连接形成机器人玩具,可以实现孩子对这些字母的识记,能增长知识和提高小孩的智力,同时又可将这些字母造型块组合拼装成机器人玩具进行玩耍,有效提高该玩具的玩耍趣味性,吸引小孩的目光和迎合他们的喜好,还能锻炼小孩的动手能力和创新思维能力。
21.本实用新型通过结构上的改进,具有结构设计新颖,变形样式多样,趣味性强,可锻炼儿童动手能力及逻辑思维,培养儿童学习兴趣,寓教于乐等优点。
22.本实用新型提供一种字母n至z变形组合机器人玩具,解决了现有技术中变形组合玩具变形样式单一、趣味性差、教育意义不足的问题。
附图说明
23.为了更清楚地说明本实用新型的实施例的技术方案,下面将对本实用新型描述中所需要使用的附图作简单介绍,显而易见地,下面描述中的附图仅是实用新型的一些实施例和实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
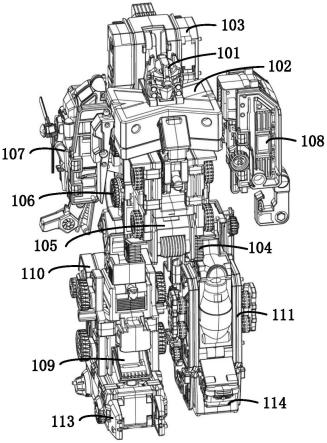
24.图1为本实用新型提供的字母n至z变形组合机器人玩具的第一种状态结构示意图。
25.图2为本实用新型提供的字母n至z变形组合机器人玩具的第二种状态结构示意图。
26.图3为本实用新型提供的字母n至z变形组合机器人玩具的第一种分离状态结构示意图。
27.图4为本实用新型提供的字母n至z变形组合机器人玩具的第二种分离状态结构示意图。
28.图5为字母x造型块变形为肩部组件的第一种状态结构示意图。
29.图6为字母x造型块变形为肩部组件的第二种状态结构示意图。
30.图7为字母p造型块变形为颈部组件的第一种状态结构示意图。
31.图8为字母p造型块变形为颈部组件的第二种状态结构示意图。
32.图9为字母n造型块变形为躯干部组件的第一种状态结构示意图。
33.图10为字母n造型块变形为躯干部组件的第二种状态结构示意图。
34.图11为字母r造型块变形为前胸组件的第一种状态结构示意图。
35.图12为字母r造型块变形为前胸组件的第二种状态结构示意图。
36.图13为字母q造型块变形为后背组件的第一种状态结构示意图。
37.图14为字母q造型块变形为后背组件的第二种状态结构示意图。
38.图15为字母v造型块变形为右手组件的第一种状态结构示意图。
39.图16为字母v造型块变形为右手组件的第二种状态结构示意图。
40.图17为字母u造型块变形为左手组件的第一种状态结构示意图。
41.图18为字母u造型块变形为左手组件的第二种状态结构示意图。
42.图19为字母s造型块变形为第一右腿组件的第一种状态结构示意图。
43.图20为字母s造型块变形为第一右腿组件的第二种状态结构示意图。
44.图21为字母y造型块变形为第二右腿组件的第一种状态结构示意图。
45.图22为字母y造型块变形为第二右腿组件的第二种状态结构示意图。
46.图23为字母o造型块变形为第一左腿组件的第一种状态结构示意图。
47.图24为字母o造型块变形为第一左腿组件的第二种状态结构示意图。
48.图25为字母t造型块变形为第二左腿组件的第一种状态结构示意图。
49.图26为字母t造型块变形为第二左腿组件的第二种状态结构示意图。
50.图27为字母z造型块变形为右脚组件的第一种状态结构示意图。
51.图28为字母z造型块变形为右脚组件的第二种状态结构示意图。
52.图29为字母w造型块变形为左脚组件的第一种状态结构示意图。
53.图30为字母w造型块变形为左脚组件的第二种状态结构示意图。
54.附图中,各标号所代表的部件列表如下:
55.101、头部组件;1011、头部安装孔;102、肩部组件;1021、颈部安装孔;1022、躯干部安装孔;1023、手部安装孔;103、颈部组件;1031、头部连接杆;1032、颈部连接杆;104、躯干部组件;1041、躯干部连接杆;1042、前胸安装孔;1043、后背连接杆;1044、右腿安装孔;1045、左腿安装孔;105、前胸组件;1051、前胸连接杆;106、后背组件;1061、后背安装孔;107、右手组件;1071、右手连接杆;108、左手组件;1081、左手连接杆;109、第一右腿组件;1091、右腿连接杆;1092、第一右腿连接杆;110、第二右腿组件;1101、第二右腿安装孔;111、第一左腿组件;1111、左腿连接杆;1112、第一左腿安装孔;112、第二左腿组件;1121、第二左腿安装孔;113、右脚组件;1131、第一右腿安装孔;1132、第二右腿连接杆;114、左脚组件;1141、第一左腿连接杆;1142、第二左腿连接杆;2、字母“x”造型块;3、字母“p”造型块;4、字母“n”造型块;5、字母“r”造型块;6、字母“q”造型块;7、字母“v”造型块;8、字母“u”造型块;
9、字母“s”造型块;10、字母“y”造型块;11、字母“o”造型块;12、字母“t”造型块;13、字母“z”造型块;14、字母“w”造型块。
具体实施方式
56.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
57.需要说明的是,在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
58.此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
59.同时,在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电性连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
60.如图1-图4所示,一种字母n至z变形组合机器人玩具,包括头部组件101、肩部组件102、颈部组件103、躯干部组件104、前胸组件105、后背组件106、右手组件107、左手组件108、第一右腿组件109、第二右腿组件110、第一左腿组件111、第二左腿组件112、右脚组件113和左脚组件114。
61.头部组件101与颈部组件103插接安装;颈部组件103插接安装在肩部组件102的上方;躯干部组件104插接安装在肩部组件102的下方;前胸组件105插接安装在躯干部组件104的前方;后背组件106插接安装在躯干部组件104的后方;右手组件107和左手组件108分别插接安装在肩部组件102的右侧和左侧;第一右腿组件109和第二右腿组件110插接安装在右脚组件113上,第一左腿组件111和第二左腿组件112插接安装在左脚组件114;第一右腿组件109和第一左腿组件111分别插接安装在躯干部组件104的右侧和左侧。
62.如图5-图6所示,肩部组件102为字母“x”造型块2;如图7-图8所示,颈部组件103由字母“p”造型块3变形得到;颈部组件103的外形呈现为吊机;如图9-图10所示,躯干部组件104由字母“n”造型块4变形得到;如图11-图12所示,前胸组件105由字母“r”造型块5变形得到;前胸组件105的外形呈现为压路机;如图13-图14所示,后背组件106由字母“q”造型块6变形得到;如图15-图16所示,右手组件107由字母“v”造型块7变形得到;右手组件107的外形呈现为直升机;如图17-图18所示,左手组件108由字母“u”造型块8变形得到;左手组件108的外形呈现为挖掘机;如图19-图20所示,第一右腿组件109由字母“s”造型块9变形得到;第一右腿组件109的外形呈现为翻斗车;如图21-图22所示,第二右腿组件110由字母“y”造型块10变形得到;如图23-图24所示,第一左腿组件111由字母“o”造型块11变形得到;第一左腿组件111的外形呈现为搅拌车;如图25-图26所示,第二左腿组件112由字母“t”造型块12变形得到;如图27-图28所示,右脚组件113由字母“z”造型块13变形得到;如图29-图30
所示,左脚组件114由字母“w”造型块14变形得到。
63.本实用新型通过将玩具组件设计成字母造型块n至z,并将字母造型块通过拉伸、转动或折叠其部件等变形操作实现字母造型块由第一状态变为第二状态,再通过将变形后的字母造型块连接形成机器人玩具,可以实现孩子对这些字母的识记,能增长知识和提高小孩的智力,同时又可将这些字母造型块组合拼装成机器人玩具进行玩耍,有效提高该玩具的玩耍趣味性,吸引小孩的目光和迎合他们的喜好,还能锻炼小孩的动手能力和创新思维能力。
64.本实用新型通过结构上的改进,具有结构设计新颖,变形样式多样,趣味性强,可锻炼儿童动手能力及逻辑思维,培养儿童学习兴趣,寓教于乐等优点。
65.如图3-图6所示,肩部组件102包括颈部安装孔1021、躯干部安装孔1022和两个手部安装孔1023。
66.肩部组件102为变形组合机器人玩具承上启下的组件,通过在肩部组件102开设颈部安装孔1021、躯干部安装孔1022和手部安装孔1023,可以实现对颈部组件103、躯干部组件104、右手组件107和左手组件108的插接安装。
67.如图3-图8所示,颈部组件103包括头部连接杆1031和颈部连接杆1032;头部组件101包括头部安装孔1011;头部连接杆1031与头部安装孔1011插接安装;颈部连接杆1032与颈部安装孔1021插接安装。
68.头部连接杆1031的大小和形状与头部安装孔1011适配,通过头部连接杆1031与头部安装孔1011插接安装,实现头部组件101和颈部组件103的连接;颈部连接杆1032的大小和形状与颈部安装孔1021适配,通过颈部连接杆1032与颈部安装孔1021插接安装,实现颈部组件103与肩部组件102的连接。
69.如图3-图10所示,躯干部组件104包括躯干部连接杆1041、前胸安装孔1042和后背连接杆1043;躯干部连接杆1041与躯干部安装孔1022插接安装。
70.躯干部组件104为机器人玩具的核心组件,躯干部连接杆1041的大小和形状与躯干部安装孔1022适配,通过在躯干部组件104上开设躯干部连接杆1041,实现肩部组件102与躯干部组件104的连接。
71.前胸组件105包括前胸连接杆1051;后背组件106包括后背安装孔1061;前胸连接杆1051与前胸安装孔1042插接安装;后背安装孔1061与后背连接杆1043插接安装。
72.前胸连接杆1051的大小和形状与前胸安装孔1042适配,后背安装孔1061的大小和形状与后背连接杆1043适配,通过在躯干部组件104上开设前胸安装孔1042和后背连接杆1043,实现躯干部组件104与前胸组件105和后背组件106的连接。
73.如图3-图12所示,右手组件107包括右手连接杆1071;左手组件108包括左手连接杆1081;右手连接杆1071和左手连接杆1081分别与手部安装孔1023插接安装。
74.右手连接杆1071和左手连接杆1081的大小和形状与手部安装孔1023适配,通过右手连接杆1071和左手连接杆1081分别与手部安装孔1023插接安装,实现右手组件107和左手组件108与肩部组件102的连接。
75.如图3-图24所示,躯干部组件104包括右腿安装孔1044和左腿安装孔1045;
76.第一右腿组件109包括右腿连接杆1091;第一左腿组件111包括左腿连接杆1111;右腿安装孔1044和右腿连接杆1091插接安装;左腿安装孔1045和左腿连接杆1111插接安
装。
77.右腿安装孔1044的大小和形状与右腿连接杆1091适配,左腿安装孔1045的大小和形状与左腿连接杆1111适配,通过右腿安装孔1044和右腿连接杆1091插接安装,左腿安装孔1045和左腿连接杆1111插接安装,实现第一右腿组件109和第一左腿组件111与躯干部组件104的连接。
78.如图3-图30所示,右脚组件113包括第一右腿安装孔1131和第二右腿连接杆1132;左脚组件114包括第一左腿连接杆1141和第二左腿连接杆1142。
79.通过在右脚组件113上开设第一右腿安装孔1131和第二右腿连接杆1132,在左脚组件114上开设第一左腿连接杆1141和第二左腿连接杆1142,实现右脚组件113与第一右腿组件109和第一左腿组件111的连接,实现左脚组件114与第一左腿组件111和第二左腿组件112的连接。
80.如图3-图30所示,第一右腿组件109包括第一右腿连接杆1092;第一左腿组件111包括第一左腿安装孔1112;
81.第一右腿连接杆1092和第一右腿安装孔1131插接安装;第一左腿安装孔1112与第一左腿连接杆1141插接安装。
82.第一右腿连接杆1092的大小和形状与第一右腿安装孔1131适配,通过第一右腿连接杆1092和第一右腿安装孔1131插接安装,实现了右脚组件113与第一右腿组件109的连接;第一左腿安装孔1112的大小和形状与第一左腿连接杆1141适配;第一左腿安装孔1112与第一左腿连接杆1141插接安装,实现了左脚组件114与第一左腿组件111的连接。
83.如图3-图30所示,第二右腿组件110包括第二右腿安装孔1101;第二左腿组件112包括第二左腿安装孔1121;
84.第二右腿安装孔1101与第二右腿连接杆1132插接安装;第二左腿安装孔1121与第二左腿连接杆1142插接安装。
85.第二右腿安装孔1101的大小和形状与第二右腿连接杆1132适配,通过第二右腿安装孔1101与第二右腿连接杆1132插接安装,实现了右脚组件113与第二右腿组件110的连接;第二左腿安装孔1121的大小和形状与第二左腿连接杆1142适配,通过第二左腿安装孔1121与第二左腿连接杆1142插接安装,实现了左脚组件114与第二左腿组件112的连接。
86.字母造型块n至z可通过拉伸、转动或折叠其部件而实现从字母造型的第一形态变形成玩具组件的第二形态,因此字母造型块n至z不仅可以用于字母的识记,还可做为变形玩具玩耍,从而实现该玩具单体具有可玩性,而且该第二形态可为搅拌车造型或翻斗车造型或压路机造型或挖掘机造型等,所以字母造型块n至z变形成第二形态后还可进行协作玩耍,进一步增加该玩具的玩耍趣味性和互动性。
87.综上所述,本实用新型的字母n至z变形组合机器人玩具,其设计巧妙,造型多样,既可用做字母识记,又可做协作玩耍,还可做组合变形玩具,不仅可以学到知识,还能互动玩耍,有效促进智力和动手能力的提升,而且可保持长时间的玩耍趣味性,是一款寓教于乐的变形组合玩具。
88.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1