一种基于节肢动物附肢的攀岩机械爪
1.本实用新型涉及一种攀岩机械爪,具体为一种基于节肢动物附肢的攀岩机械爪,属于户外攀爬机械技术领域。
背景技术:
2.随着科学技术的发展及人类对世界环境探测的深入,适用于野外山崖岩壁甚至月球及火星表面的爬行装置受到了越来越广泛的关注。而自然界许多动物本身便具有在恶劣环境下自由行走的能力,比如在山崖上如履平地的岩羊,在墙壁玻璃上爬行的壁虎,以及甲虫,蜥蜴,一些猫科动物等,分析这些生物的结构特征并应用于机械设备及机器人领域对该领域的发展有很大意义。目前国内外有许多以仿生为基础的科研成果,如南京航空航天大学的研究人员受壁虎启发,用“毒液”充当机器人的“壁虎的脚”,来粘附和适应各种表面,以实现高效运动。卡内基梅隆大学学生研发的仿生新型六足机器人t-rhex有微小的“锥形脚趾”。这种脚趾可以帮助t-rhex抓住粗糙的表面,比如砖、木头或混凝土。这也让t-rhex可以爬上非常陡峭的斜坡,并且悬挂在上面。同时也有许多团队研制出了带有钩刺的机器人或机械手,用以抓紧比较粗糙的表面。
3.但由于攀爬的平面比较粗糙,许多钩刺阵列呈一体化装置,很难做到受力均衡,个别爪刺的损坏将影响整个结构的工作。同时,对于需要负担机器人本体重量甚至一些其他负载的机器人来说,机械爪将会受到较大的压力,全部为硬质的机械装置将会产生受力不均和应力集中,容易疲劳和损坏。对于全为硬质材料的机械爪抓紧后,不容易轻易松开,容易造成爪刺的磨损和弯折。许多主动式手爪可以较好地脱离所抓物体,但一般需要电机驱动,不满足轻量化和小型化要求。
技术实现要素:
4.本实用新型的目的就在于为了解决上述至少一个技术问题而提供一种基于节肢动物附肢的攀岩机械爪。
5.本实用新型通过以下技术方案来实现上述目的:一种基于节肢动物附肢的攀岩机械爪,包括壳体、拉杆、拉杆固定盘、手爪安装盘、弹簧以及手爪,拉杆固定盘安装于壳体内部,手爪安装盘安装于壳体底部,拉杆贯穿于壳体、拉杆固定盘、手爪安装盘中心,壳体的底端外侧周边连接有手爪,手爪呈环形状均匀分布设置有六个;
6.每个手爪由延长箱和抓片箱两部分构成,两部分之间通过第二弹簧连接,抓片箱外壳中设置有若干个抓片紧密平行排列,其中延长箱上部与壳体下部通过第一弹簧连接,延长箱下部与拉杆末端及延长箱内部与拉杆固定盘底部分别通过尼龙线连接。
7.作为本实用新型再进一步的方案:拉杆开有通槽,与拉杆固定盘中开设的孔对应设置,并用销贯穿,当拉杆固定盘位于拉杆通槽底部,继续向上提拉拉杆,拉杆固定盘与拉杆一同运动。
8.作为本实用新型再进一步的方案:手爪安装盘与壳体通过螺栓连接,手爪与手爪
安装盘通过铰链连接,拉杆固定盘与壳体间通过槽配合。
9.作为本实用新型再进一步的方案:延长箱上表面与壳体下部设有拉环,且两拉环分别挂扣在第一弹簧的两端。
10.作为本实用新型再进一步的方案:延长箱的内部以及下表面均设有拉环,拉杆末端开设有一通孔,延长箱下表面设置的拉环与通孔通过尼龙线穿插连接,延长箱内部设置的拉环与拉杆固定盘底部通过尼龙线穿插连接。
11.作为本实用新型再进一步的方案:抓片为倒钩型结构,下部开有多个安装孔,抓片具有多处网状结构。
12.作为本实用新型再进一步的方案:抓片所开设的安装孔内安装由钢针制成的弧形结构钢钩。
13.本实用新型的有益效果是:
14.1.本实用新型爪刺阵列密集,且均可独立拆卸,在满足抓地强度的同时具有维护性好,拆卸方便的优点,最易损坏和消化的爪钩具有很强的独立性;
15.2.爪刺所在的抓片使用弹性材料,且有网状结构,且手爪为多个薄抓片组合而成,每一项设计都很好地分散了受力,减少了应力集中,且可以适当地微调抓勾位置,以达到最理想的勾抓状态;
16.3.每个手爪均具有很高的再创造性,通过改变抓片的形状结构与材料,手爪的个数及位置,手爪的安装方式,可适应不同的工作环境;
17.4.本机械爪无需电机,通过机械结构的连接便可实现手爪的打开与闭合,减少了对电力的依赖,具有轻量化和小型化的优点;
18.5.本机械爪操作简单,维护方便,且具有良好的性能,不仅可以独立作业,还可以同其他机械装置自由结合,具有很高的普适性。
附图说明
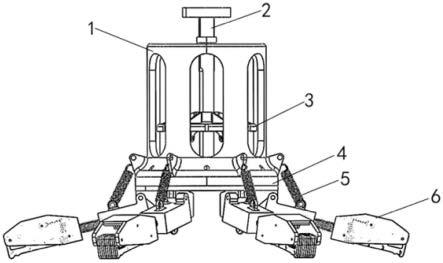
19.图1为本实用新型整体结构示意图;
20.图2为本实用新型壳体与手爪安装盘结构示意图;
21.图3为本实用新型拉杆与拉杆固定盘的结构示意图;
22.图4为本实用新型手爪俯视结构示意图;
23.图5为本实用新型延长箱侧视结构示意图;
24.图6为本实用新型延长箱右视结构示意图;
25.图7为本实用新型抓片箱的抓片结构示意图。
26.图中:1、壳体,2、拉杆,3、拉杆固定盘,4、手爪安装盘,5、第一弹簧,6、手爪,61、延长箱,62、抓片箱,63、抓片,64、第二弹簧。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.实施例一
29.如图1至图7所示,一种基于节肢动物附肢的攀岩机械爪,包括壳体1、拉杆2、拉杆固定盘3、手爪安装盘4、弹簧5以及手爪6,拉杆固定盘3安装于壳体1内部,手爪安装盘4安装于壳体1底部,拉杆2贯穿于壳体1、拉杆固定盘3、手爪安装盘4中心,壳体1的底端外侧周边连接有手爪6,手爪6呈环形状均匀分布设置有六个;
30.每个手爪6由延长箱61和抓片箱62两部分构成,两部分之间通过第二弹簧64连接,抓片箱62外壳中设置有若干个抓片63紧密平行排列,其中延长箱61上部与壳体1下部通过第一弹簧5连接,延长箱61下部与拉杆2末端及延长箱61内部与拉杆固定盘3底部分别通过尼龙线连接。
31.实施例二
32.如图1至图7所示,本实施例中除包括实施例一中的所有技术特征之外,还包括:
33.拉杆2开有通槽,与拉杆固定盘3中开设的孔对应设置,并用销贯穿,当拉杆固定盘3位于拉杆2通槽底部,继续向上提拉拉杆2,拉杆固定盘与拉杆2一同运动。
34.手爪安装盘4与壳体1通过螺栓连接,手爪6与手爪安装盘4通过铰链连接,拉杆固定盘3与壳体1间通过槽配合。
35.实施例三
36.如图1至图7所示,本实施例中除包括实施例一中的所有技术特征之外,还包括:
37.延长箱61上表面与壳体1下部设有拉环,且两拉环分别挂扣在第一弹簧5的两端。
38.延长箱61的内部以及下表面均设有拉环,拉杆2末端开设有一通孔,延长箱61下表面设置的拉环与通孔通过尼龙线穿插连接,延长箱61内部设置的拉环与拉杆固定盘3底部通过尼龙线穿插连接。
39.抓片63为倒钩型结构,下部开有多个安装孔,抓片63具有多处网状结构,使抓片63的安装孔与抓片箱62小孔重合,通过销组装。
40.抓片63所开设的安装孔内安装由钢针制成的弧形结构钢钩。
41.在自然状态下由于第二弹簧64对手爪的提拉作用,手爪张开,处于抓取准备状态,当拉动拉杆2时,随着拉杆2的上升,拉杆2底部通孔中的尼龙绳牵拉手爪6中延长箱41底部的拉环,使所有手爪6同时向内合拢,与所抓物体紧紧贴合,当拉杆2运动到所开长通槽底部触碰贯穿拉杆通槽与拉杆固定盘的销时,拉杆2将带动拉杆固定盘3一同向上运动,拉杆固定盘3底部的拉环通过尼龙绳连接手爪6中延长箱61内部拉环,拉动手爪6向中心聚拢回缩,手爪6的抓片箱62中紧密排列的抓片63安装有钢钩,在手爪6的回缩过程中勾住所抓材料的突起或凹陷,并由于牵拉作用而具有足够的力抓紧材料,此时机械爪处于抓紧状态,抓片63中的网状结构为钢钩的活动提供的一定的弹性,使钢钩有更大的机会选取更加稳定的位置固定,且可以减小应力集中,分散受力,提高的手爪的承受能力;当机械爪需要松开手爪时,只需将拉杆向下推,便可卸下加之于手爪的力,在第一弹簧5的牵拉作用下,手爪自然张开,完成手爪的放松。
42.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含
义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
43.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1