基于触摸控制器的动感电车阻力控制方法及系统与流程
本发明涉及动感电车领域,尤其涉及一种基于触摸控制器的动感电车阻力控制方法及系统。
背景技术:
1、动感电车的阻力控制过程为:在动感电车的铜质飞轮的外侧有一些磁铁(与飞轮不接触),人在健身时会带动铜质飞轮转动,磁铁会对飞轮产生阻碍,通过拉动控制拉杆可以改变磁铁与飞轮间的距离,从而实现动感电车的阻力控制。
2、目前,首先,突然对磁铁与铜质飞轮之间的距离进行相比于原先距离而言的较大幅度调整时,会导致动感电车发生较大幅度的振动,并且动感电车的阻力值在进行迅速的大幅度调整时,会出现安全隐患,其次,由于动感单车的磁性元件的位置检测的误差,会导致整个动感单车的磁控存在较大误差,若对动感单车的阻力值进行单次的控制而不及时检测误差的存在的话,会导致在缺乏误差反馈的前提下,动感单车的阻力值控制发生错误。因此,动感电车阻力控制方法缺乏对阻力的循循渐进的反馈控制。
技术实现思路
1、为了解决上述问题,本发明提供了一种基于触摸控制器的动感电车阻力控制方法及系统,可以实现对阻力的循循渐进的反馈控制。
2、第一方面,本发明提供了一种基于触摸控制器的动感电车阻力控制方法,包括:
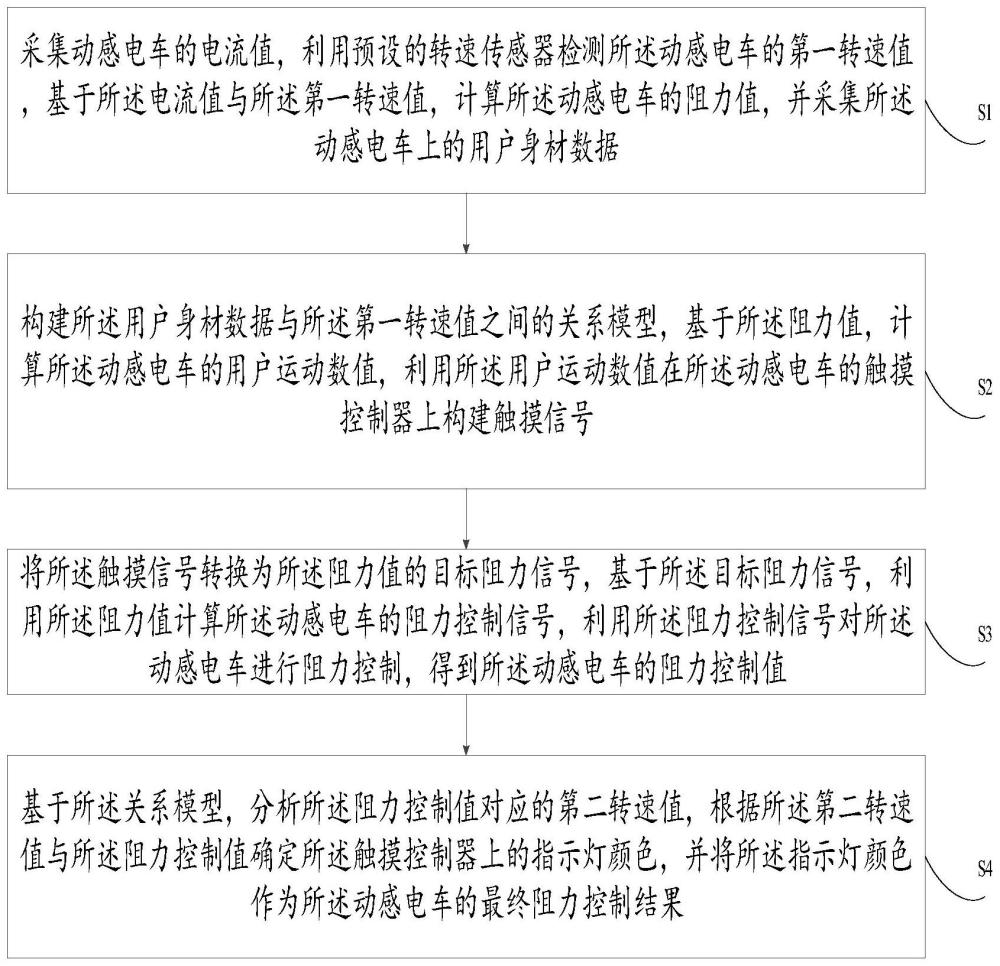
3、采集动感电车的电流值,利用预设的转速传感器检测所述动感电车的第一转速值,基于所述电流值与所述第一转速值,计算所述动感电车的阻力值,并采集所述动感电车上的用户身材数据;
4、构建所述用户身材数据与所述第一转速值之间的关系模型,基于所述阻力值,计算所述动感电车的用户运动数值,利用所述用户运动数值在所述动感电车的触摸控制器上构建触摸信号;
5、将所述触摸信号转换为所述阻力值的目标阻力信号,基于所述目标阻力信号,利用所述阻力值计算所述动感电车的阻力控制信号,利用所述阻力控制信号对所述动感电车进行阻力控制,得到所述动感电车的阻力控制值;
6、基于所述关系模型,分析所述阻力控制值对应的第二转速值,根据所述第二转速值与所述阻力控制值确定所述触摸控制器上的指示灯颜色,并将所述指示灯颜色作为所述动感电车的最终阻力控制结果。
7、在第一方面的一种可能实现方式中,所述基于所述电流值与所述第一转速值,计算所述动感电车的阻力值,包括:
8、基于所述电流值与所述第一转速值,利用下述公式计算所述动感电车的阻力值:
9、f=q×v×b
10、其中,f表示所述阻力值,q表示所述电流值,v表示所述第一转速值,b表示磁感应强度,与永磁铁的表面磁场强度和磁缝隙相关,磁铁的充磁强度越大,磁控阻力越大,磁缝隙越小,磁场强度越大,阻力越大。
11、在第一方面的一种可能实现方式中,所述采集所述动感电车上的用户身材数据,包括:
12、利用所述动感电车上的体重计检测所述动感电车上的用户的体重;
13、利用激光测距技术测量所述用户的身体坐标;
14、从所述身体坐标中选取最大垂直坐标、最小垂直坐标及最大水平坐标;
15、在所述最大水平坐标与所述最小垂直坐标不一致时,基于所述最大垂直坐标、所述最小垂直坐标及所述最大水平坐标,利用下述公式计算所述用户的第一身高:
16、
17、其中,l表示所述第一身高,x1,y1表示所述最大垂直坐标,x2,y2表示所述动感电车上的座椅的坐标,x3,y3表示所述最大水平坐标,x4,y4表示所述最小垂直坐标;
18、在所述最大水平坐标与所述最小垂直坐标一致时,基于直线斜率不变原理,从所述身体坐标中选取膝盖坐标;
19、基于所述大垂直坐标、所述最小垂直坐标及所述膝盖坐标,计算所述用户的第二身高;
20、基于所述体重、所述第一身高及所述第二身高,确定所述动感电车上的用户身材数据。
21、在第一方面的一种可能实现方式中,所述构建所述用户身材数据与所述第一转速值之间的关系模型,包括:
22、将所述第一转速值中每个时刻下的第一转速值作为自变量;
23、将所述用户身材数据作为因变量;
24、计算所述自变量与所述因变量之间的回归系数和残差;
25、利用所述回归系数和所述残差构建所述自变量与所述因变量之间的回归模型,并将所述回归模型作为所述关系模型。
26、在第一方面的一种可能实现方式中,所述基于所述阻力值,计算所述动感电车的用户运动数值,包括:利用下述公式计算所述动感电车的用户运动速度:
27、
28、其中,v表示所述用户运动速度,s基于车轮转速所计算得到的运动距离,t表示本次动作运动持续时间;
29、基于所述阻力值,利用下述公式计算所述动感电车的用户运动功率:
30、
31、其中,w表示用户运动功率,f表示所述阻力值,s基于车轮转速所计算得到的运动距离;
32、基于所述用户运动功率,利用下述公式计算所述动感电车的用户能量消耗:
33、k=w×t×3.63
34、其中,k表示用户能量消耗,w表示用户运动功率,t表示本次动作运动持续时间;
35、将所述用户运动速度与所述用户能量消耗作为所述用户运动数值。
36、在第一方面的一种可能实现方式中,所述基于所述目标阻力信号,利用所述阻力值计算所述动感电车的阻力控制信号,包括:
37、提取所述动感电车的当前控制信号;
38、计算所述当前控制信号与所述动感电车的阻力反馈信号之间的信号误差;
39、基于所述信号误差,计算所述动感电车的输入信号;
40、将所述输入信号输入至所述动感电车中,以通过所述动感电车输出所述输入信号对应的输出信号;
41、在所述输出信号与所述目标阻力信号之间的误差为预设误差时,将所述输入信号作为所述阻力控制信号。
42、在第一方面的一种可能实现方式中,所述基于所述信号误差,计算所述动感电车的输入信号,包括;
43、基于所述信号误差,利用下述公式计算所述动感电车的输入信号:
44、
45、其中,u(t)表示所述输入信号,kp表示比例增益,ki表示积分增益,kd表示微分增益,t表示时间,e(t)表示所述信号误差,τ表示自变量。
46、在第一方面的一种可能实现方式中,所述基于所述关系模型,分析所述阻力控制值对应的第二转速值,包括:
47、采集所述阻力控制值对应的所述动感电车在当前时刻的用户身材数据;
48、基于所述所述动感电车在当前时刻的用户身材数据,利用所述关系模型计算所述第二转速值。
49、在第一方面的一种可能实现方式中,所述根据所述第二转速值与所述阻力控制值确定所述触摸控制器上的指示灯颜色,包括:
50、分析所述阻力控制值的前提下,所述动感电车在当前时刻的实际转速值;
51、在所述第二转速值与所述实际转速值不一致时,对所述目标阻力信号进行信号调整,得到调整信号,并基于所述调整信号返回上述基于所述目标阻力信号,利用所述阻力值计算所述动感电车的阻力控制信号的过程;
52、在所述第二转速值与所述实际转速值一致时,基于所述目标阻力信号,构建所述指示灯颜色。
53、第二方面,本发明提供了一种基于触摸控制器的动感电车阻力控制系统,所述系统包括:
54、身材采集模块,用于采集动感电车的电流值,利用预设的转速传感器检测所述动感电车的第一转速值,基于所述电流值与所述第一转速值,计算所述动感电车的阻力值,并采集所述动感电车上的用户身材数据;
55、触摸构建模块,用于构建所述用户身材数据与所述第一转速值之间的关系模型,基于所述阻力值,计算所述动感电车的用户运动数值,利用所述用户运动数值在所述动感电车的触摸控制器上构建触摸信号;
56、阻力控制模块,用于将所述触摸信号转换为所述阻力值的目标阻力信号,基于所述目标阻力信号,利用所述阻力值计算所述动感电车的阻力控制信号,利用所述阻力控制信号对所述动感电车进行阻力控制,得到所述动感电车的阻力控制值;
57、颜色确定模块,用于基于所述关系模型,分析所述阻力控制值对应的第二转速值,根据所述第二转速值与所述阻力控制值确定所述触摸控制器上的指示灯颜色,并将所述指示灯颜色作为所述动感电车的最终阻力控制结果。
58、与现有技术相比,本方案的技术原理及有益效果在于:
59、本发明实施例通过基于所述电流值与所述第一转速值,计算所述动感电车的阻力值,以用于计算最近时间内的动感电车的阻力大小,进一步地,本发明实施例通过采集所述动感电车上的用户身材数据,以用于基于阻力对转速产生影响和用户身材对转速的影响,在后续分析不同身材用户的车轮转速、阻力之间的关系,本发明实施例通过构建所述用户身材数据与所述第一转速值之间的关系模型,以用于识别身材数据对于车轮转速的影响,进一步地,本发明实施例通过基于所述阻力值,计算所述动感电车的用户运动数值,以用于将用户在动感电车的运动情况具象化为运动数据报告,便于用户查看后进行下一步健身阻力的选择,进一步地,本发明实施例通过基于所述目标阻力信号,利用所述阻力值计算所述动感电车的阻力控制信号,以用于计算施加在动感电车的车轮与磁铁之间距离控制器上的信号,通过所述阻力控制信号可以实现车轮与磁铁之间的距离控制,从而实现磁场控制,最终实现阻力的控制,这样可以通过pid控制算法来逐级实现阻力控制,本发明实施例通过基于所述关系模型,分析所述阻力控制值对应的第二转速值,以用于利用回归模型和当前用户的身材数据来计算当前理想化的转速,进一步地,本发明实施例通过根据所述第二转速值与所述阻力控制值确定所述触摸控制器上的指示灯颜色,以用于将阻力调整好的信息通过不同颜色的深浅来反馈给用户,通过颜色的深浅的反馈来提升反馈准确率。因此,本发明实施例提出的一种基于触摸控制器的动感电车阻力控制方法及系统,可以实现对阻力的循循渐进的反馈控制。
- 还没有人留言评论。精彩留言会获得点赞!