一种风阻划船机控制方法、系统、装置及存储介质与流程
本技术涉及健身器材,尤其是涉及一种风阻划船机控制方法、系统、装置及存储介质。
背景技术:
1、随着人们物质水平的提高,越来越多的人运动健身通过运动健身来改善自身体质、提高自身健康。运动健身大致分为器械锻炼和非器械锻炼,而器械锻炼需要使用到一些特定的健身器材从而辅助进行健身。健身器材一般以训练功能多少来分为单功能和综合型多功能两大类,常用的有椭圆机、跑步机、划船机、健美车等。
2、相关技术中,划船机是以训练为目的,用来模拟水上赛艇运动的机器。划船机包括机体、滑移安装于机体上的座椅、设置于机体上的踏板、设置于机体上的阻力机构及由缆线连接到阻力机构的拉手件。划船机通过阻力机构中阻力的产生方式不同,分为风阻划船机、水阻划船机及磁阻划船机等。风阻划船机由于更好的锻炼效果以及阻力范围大等特点,一般被专业赛艇等专业人士进行使用。风阻划船机是阻力机构通过空气产生的阻力,风阻划船机中的阻力机构包括飞轮及用于保护飞轮的外壳,外壳上设置有调节器,调节器通过改变进风量调节阻力。在使用放置于地面上的风阻划船器时,操作者坐于座椅上并将双脚固定于机体的脚踏板上,通过拉动拉手件,并通过飞轮与空气产生的阻力从而产生锻炼的效果。
3、针对上述中的相关技术,发明人发现有如下缺陷:由于一般在使用风阻划船机时,风阻划船机都是将固定于地面上,而实际的赛艇等船只在漂浮在水面上时会随着水的翻涌而产生晃动,从而使专业赛艇等专业人士在采用风阻划船机进行训练时无法直接感受到实际赛艇在水面上进行划动时的感觉,降低了专业人士训练效果。
技术实现思路
1、为了提高专业人士采用风阻划船机进行训练时的训练效果,本技术提供一种风阻划船机控制方法、系统、装置及存储介质。
2、第一方面,本技术提供一种风阻划船机控制方法,采用如下的技术方案:
3、一种风阻划船机控制方法,包括:
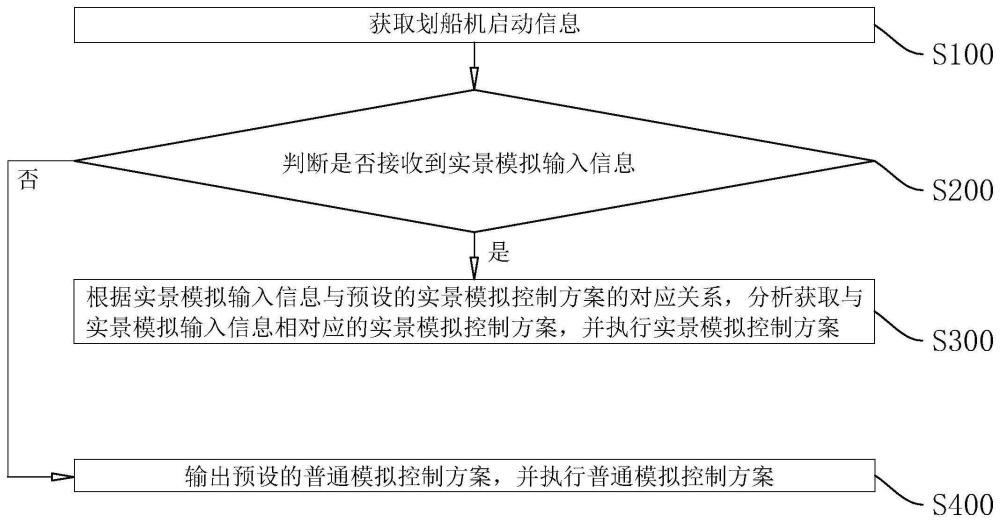
4、获取划船机启动信息;
5、判断是否接收到实景模拟输入信息;
6、若为是,则根据实景模拟输入信息与预设的实景模拟控制方案的对应关系,分析获取与实景模拟输入信息相对应的实景模拟控制方案,并执行实景模拟控制方案;
7、若为否,则输出预设的普通模拟控制方案,并执行普通模拟控制方案。
8、通过采用上述技术方案,在对划船机启动信息进行获取后,对是否接收到实景模拟输入信息进行判断,当接收到时,通过实景模拟输入信息,分析获取实景模拟控制方案,并执行实景模拟控制方案,当未接收到时,输出预设的普通模拟控制方案,并执行普通模拟控制方案,从而使专业赛艇等专业人士在采用风阻划船机进行训练时可以感受到如实际赛艇在水面上进行划动时的感觉,进而提高专业人士采用风阻划船机进行训练时的训练效果。
9、可选的,实景模拟控制方案包括:
10、随机从预设的且均位于基准区间内的单次摇晃持续时间数据库中选出单次摇晃持续时间,随机从预设的且均位于基准区间内的单次摇晃控制信息数据库中选出单次摇晃控制信息,并将单次摇晃持续时间及单次摇晃控制信息发送至预设于机体上的摇晃装置;
11、获取控制初始时间与当前时间,定义控制初始时间为发送单次摇晃控制信息的时间;
12、根据控制初始时间、当前时间与预设的摇晃控制持续时间,分析获取与控制初始时间及当前时间相对应的摇晃控制持续时间;
13、判断摇晃控制持续时间是否小于单次摇晃持续时间;
14、若为是,则继续获取当前时间;
15、若为否,则重新执行随机从预设的且均位于基准区间内的单次摇晃持续时间数据库中选出单次摇晃持续时间,随机从预设的且均位于基准区间内的单次摇晃控制信息数据库中选出单次摇晃控制信息,并将单次摇晃持续时间及单次摇晃控制信息发送至预设于机体上的摇晃装置。
16、通过采用上述技术方案,通过从单次摇晃持续时间数据库中随机选出单次摇晃持续时间,从单次摇晃控制信息数据库中随机选出单次摇晃控制信息,并将单次摇晃持续时间及单次摇晃控制信息发送至预设于机体上的摇晃装置,再对控制初始时间与当前时间进行获取,并分析获取摇晃控制持续时间,再对摇晃控制持续时间是否小于单次摇晃持续时间进行判断,当小于时,继续获取当前时间,当不小于时,重新随机选取单次摇晃持续时间及单次摇晃控制信息,并将单次摇晃持续时间及单次摇晃控制信息发送至预设于机体上的摇晃装置,从而使风阻划船机进行随机的晃动,进而使专业赛艇等专业人士在采用风阻划船机进行训练时可以感受到如实际赛艇在水面上进行划动时的感觉,最终达到提高专业人士采用风阻划船机进行训练时的训练效果的目的。
17、可选的,随机从预设的且均位于基准区间内的单次摇晃控制信息数据库中选出单次摇晃控制信息包括:
18、获取当前摇晃基准位置点;
19、随机从预设的且均位于基准区间内的摇晃幅度值数据库中选出摇晃幅度值,随机从预设的且均位于基准区间内的摇晃方向信息数据库中选出摇晃方向信息,定义单次摇晃控制信息数据库包括摇晃幅度值数据库及摇晃方向信息数据库;
20、根据当前摇晃基准位置点、摇晃幅度值、摇晃方向信息与预设的最终摇晃基准位置点的对应关系,分析获取与当前摇晃基准位置点、摇晃幅度值及摇晃方向信息相对应的最终摇晃基准位置点;
21、根据当前摇晃基准位置点、最终摇晃基准位置点、摇晃方向信息与预设的摇晃基准控制信息的对应关系,分析获取与当前摇晃基准位置点、最终摇晃基准位置点及摇晃方向信息相对应的摇晃基准控制信息,并将摇晃基准控制信息作为单次摇晃控制信息。
22、通过采用上述技术方案,通过对当前摇晃基准位置点进行获取,并从摇晃幅度值数据库中随机选出摇晃幅度值,从摇晃方向信息数据库中随机选出摇晃方向信息,通过当前摇晃基准位置点、摇晃幅度值及摇晃方向信息分析获取最终摇晃基准位置点,再通过当前摇晃基准位置点、最终摇晃基准位置点及摇晃方向信息分析获取摇晃基准控制信息,并将摇晃基准控制信息作为单次摇晃控制信息,从而提高获取的单次摇晃控制信息的准确性。
23、可选的,还包括位于执行实景模拟控制方案之后,或者位于执行普通模拟控制方案之后的步骤,具体如下:
24、获取拉手件实时位置点;
25、根据最终摇晃基准位置点与预设的机体实时轴线的对应关系,分析获取与最终摇晃基准位置点相对应的机体实时轴线;
26、根据拉手件实时位置点、预设的阻力机构缆线出口位置点与预设的拉手件实时轴线的对应关系,分析获取与拉手件实时位置点及阻力机构缆线出口位置点相对应的拉手件实时轴线;
27、判断拉手件实时轴线与机体实时轴线是否处于平行状态;
28、若为是,则获取拉手件第一实时停顿位置点与拉手件第二实时停顿位置点,定义拉手件第一实时停顿位置点与拉手件第二实时停顿位置点为拉手件发生停顿时的拉手件实时位置点;
29、根据拉手件第一实时停顿位置点、拉手件第二实时停顿位置点与预设的停顿位置训练信息的对应关系,分析获取与拉手件第一实时停顿位置点及拉手件第二实时停顿位置点相对应的停顿位置训练信息,并将停顿位置训练信息发送至预设于机体上的显示装置;
30、若为否,则根据拉手件实时位置点、拉手件实时轴线、机体实时轴线与拉手件实时偏差值的对应关系,分析获取与拉手件实时位置点、拉手件实时轴线及机体实时轴线相对应的拉手件实时偏差值;
31、根据拉手件实时偏差值与预设的拉手件偏差提醒信息的对应关系,分析获取与拉手件实时偏差值相对应的拉手件偏差提醒信息,并将拉手件偏差提醒信息发送至预设于机体上的显示装置。
32、通过采用上述技术方案,通过对拉手件实时位置点进行获取,通过最终摇晃基准位置点分析获取机体实时轴线,通过拉手件实时位置点及阻力机构缆线出口位置点分析获取拉手件实时轴线,再对拉手件实时轴线与机体实时轴线是否处于平行状态进行判断,当处于同一平面内时,对拉手件第一实时停顿位置点与拉手件第二实时停顿位置点进行获取,通过拉手件第一实时停顿位置点及拉手件第二实时停顿位置点分析获取停顿位置训练信息,并将停顿位置训练信息发送至预设于机体上的显示装置,当不处于同一平面内时,通过拉手件实时位置点、拉手件实时轴线及机体实时轴线分析获取拉手件实时偏差值,再通过拉手件实时偏差值分析获取拉手件偏差提醒信息,并将拉手件偏差提醒信息发送至预设于机体上的显示装置,从而方便操作者在通过风阻划船机进行训练时,可以及时地对自己的训练状态进行了解,进而方便操作者及时进行调整,最终达到提高专业人士采用风阻划船机进行训练时的训练效果的目的。
33、可选的,根据拉手件第一实时停顿位置点、拉手件第二实时停顿位置点与预设的停顿位置训练信息的对应关系,分析获取与拉手件第一实时停顿位置点及拉手件第二实时停顿位置点相对应的停顿位置训练信息包括:
34、获取脚踏板接触面积长度值;
35、根据脚踏板接触面积长度值与预设的座椅移动距离区间的对应关系,分析获取与脚踏板接触面积长度值相对应的座椅移动距离区间;
36、根据座椅移动距离区间与预设的拉手件移动距离区间的对应关系,分析获取与座椅移动距离区间相对应的拉手件移动距离区间;
37、根据拉手件第一实时停顿位置点与预设的阻力机构缆线出口位置点,分析计算拉手件第一实时停顿位置点与阻力机构缆线出口位置点之间的差值并作为拉手件初始停顿距离值;
38、根据拉手件第二实时停顿位置点与预设的阻力机构缆线出口位置点,分析计算拉手件第二实时停顿位置点与阻力机构缆线出口位置点之间的差值并作为拉手件最终停顿距离值;
39、根据拉手件初始停顿距离值、拉手件最终停顿距离值、拉手件移动距离区间与预设的停顿偏差提醒信息的对应关系,分析获取与拉手件初始停顿距离值、拉手件最终停顿距离值及拉手件移动距离区间相对应的停顿偏差提醒信息,并将停顿偏差提醒信息作为停顿位置训练信息。
40、通过采用上述技术方案,通过对脚踏板接触面积长度值进行获取,并通过脚踏板接触面积长度值分析获取座椅移动距离区间,通过座椅移动距离区间分析获取拉手件移动距离区间,再对拉手件第一实时停顿位置点与阻力机构缆线出口位置点之间的差值进行分析计算并将差值作为拉手件初始停顿距离值,对拉手件第二实时停顿位置点与阻力机构缆线出口位置点之间的差值进行分析计算并将差值作为拉手件最终停顿距离值,通过拉手件初始停顿距离值、拉手件最终停顿距离值及拉手件移动距离区间分析获取停顿偏差提醒信息,并将停顿偏差提醒信息作为停顿位置训练信息,从而提高获取的停顿位置训练信息的准确性。
41、可选的,根据拉手件初始停顿距离值、拉手件最终停顿距离值、拉手件移动距离区间与预设的停顿偏差提醒信息的对应关系,分析获取与拉手件初始停顿距离值、拉手件最终停顿距离值及拉手件移动距离区间相对应的停顿偏差提醒信息包括:
42、根据拉手件初始停顿距离值与拉手件移动距离区间所对应的最小值,分析计算拉手件初始停顿距离值与拉手件移动距离区间所对应的最小值之间的差值并作为拉手件初始位置偏差实际值;
43、根据拉手件最终停顿距离值与拉手件移动距离区间所对应的最大值,分析计算拉手件最终停顿距离值与拉手件移动距离区间所对应的最大值之间的差值并作为拉手件最终位置偏差实际值;
44、根据拉手件初始停顿距离值、拉手件最终停顿距离值与预设的拉手件实际移动距离值的对应关系,分析获取与拉手件初始停顿距离值及拉手件最终停顿距离值相对应的拉手件实际移动距离值;
45、根据拉手件初始位置偏差实际值、拉手件最终位置偏差实际值、拉手件实际移动距离值与预设的位置偏差提醒信息的对应关系,分析获取与拉手件初始位置偏差实际值、拉手件最终位置偏差实际值及拉手件实际移动距离值相对应的位置偏差提醒信息,并将位置偏差提醒信息作为停顿偏差提醒信息。
46、通过采用上述技术方案,通过对拉手件初始停顿距离值与拉手件移动距离区间所对应的最小值之间的差值进行分析计算并将差值作为拉手件初始位置偏差实际值,对拉手件最终停顿距离值与拉手件移动距离区间所对应的最大值之间的差值进行分析计算并将差值作为拉手件最终位置偏差实际值,通过拉手件初始停顿距离值及拉手件最终停顿距离值分析获取拉手件实际移动距离值,通过拉手件初始位置偏差实际值、拉手件最终位置偏差实际值及拉手件实际移动距离值分析获取位置偏差提醒信息,并将位置偏差提醒信息作为停顿偏差提醒信息,从而提高获取的停顿偏差提醒信息的准确性。
47、可选的,根据拉手件初始位置偏差实际值、拉手件最终位置偏差实际值、拉手件实际移动距离值与预设的位置偏差提醒信息的对应关系,分析获取与拉手件初始位置偏差实际值、拉手件最终位置偏差实际值及拉手件实际移动距离值相对应的位置偏差提醒信息包括:
48、根据拉手件移动距离区间与预设的拉手件基准移动距离值的对应关系,分析获取与拉手件移动距离区间相对应的拉手件基准移动距离值;
49、根据拉手件实际移动距离值与拉手件基准移动距离值,分析计算拉手件实际移动距离值与拉手件基准移动距离值之间的差值并作为拉手件实际移动距离偏差实际值;
50、根据拉手件初始位置偏差实际值是否大于预设的拉手件位置偏差基准值的判断结果与拉手件最终位置偏差实际值是否大于预设的拉手件位置偏差基准值的判断结果,分析获取拉手件位置偏差提醒信息;
51、判断拉手件实际移动距离偏差实际值是否小于预设的拉手件实际移动距离偏差基准值;
52、若为是,则将拉手件位置偏差提醒信息作为位置偏差提醒信息;
53、若为否,则输出预设的拉手件移动距离偏差提醒信息,并将拉手件移动距离偏差提醒信息及拉手件位置偏差提醒信息作为位置偏差提醒信息。
54、通过采用上述技术方案,通过拉手件移动距离区间分析获取拉手件基准移动距离值,再通过对拉手件实际移动距离值与拉手件基准移动距离值之间的差值进行分析计算并将差值作为拉手件实际移动距离偏差实际值,通过拉手件初始位置偏差实际值是否大于预设的拉手件位置偏差基准值的判断结果与拉手件最终位置偏差实际值是否大于预设的拉手件位置偏差基准值的判断结果,对拉手件位置偏差提醒信息进行分析获取,再对拉手件实际移动距离偏差实际值是否小于拉手件实际移动距离偏差基准值进行判断,当小于时,将拉手件位置偏差提醒信息作为位置偏差提醒信息,当不小于时,输出预设的拉手件移动距离偏差提醒信息,并将拉手件移动距离偏差提醒信息及拉手件位置偏差提醒信息作为位置偏差提醒信息,从而提高获取的位置偏差提醒信息的准确性。
55、第二方面,本技术提供一种风阻划船机控制系统,采用如下的技术方案:
56、一种风阻划船机控制系统,包括:
57、获取模块,用于获取划船机启动信息、实景模拟输入信息、当前摇晃基准位置点、拉手件实时位置点及脚踏板接触面积长度值;
58、存储器,用于存储如第一方面中任一项的一种风阻划船机控制方法的程序;
59、处理器,存储器中的程序能够被处理器加载执行且实现如第一方面中任一项的一种风阻划船机控制方法。
60、通过采用上述技术方案,通过获取模块对划船机启动信息、实景模拟输入信息、当前摇晃基准位置点、拉手件实时位置点及脚踏板接触面积长度值进行获取,并通过处理器对存储器中的程序加载执行,从而使专业赛艇等专业人士在采用风阻划船机进行训练时可以感受到如实际赛艇在水面上进行划动时的感觉,进而提高专业人士采用风阻划船机进行训练时的训练效果。
61、第三方面,本技术提供一种风阻划船机控制装置,采用如下的技术方案:
62、一种风阻划船机控制装置,包括存储器和处理器,存储器上存储有能够被处理器加载并执行如第一方面中任一项的一种风阻划船机控制方法的计算机程序。
63、通过采用上述技术方案,通过处理器对存储器中的程序加载执行,从而使专业赛艇等专业人士在采用风阻划船机进行训练时可以感受到如实际赛艇在水面上进行划动时的感觉,进而提高专业人士采用风阻划船机进行训练时的训练效果。
64、第四方面,本技术提供一种计算机存储介质,能够存储相应的程序,具有便于实现提高专业人士采用风阻划船机进行训练时的训练效果的特点,采用如下的技术方案:
65、一种计算机存储介质,存储有能够被处理器加载并执行如第一方面中任一项的一种风阻划船机控制方法的计算机程序。
66、通过采用上述技术方案,通过存储介质对程序进行存储,从而在需要使用时,通过处理器进行加载执行,从而使专业赛艇等专业人士在采用风阻划船机进行训练时可以感受到如实际赛艇在水面上进行划动时的感觉,进而提高专业人士采用风阻划船机进行训练时的训练效果。
67、综上所述,本技术包括以下至少一种有益技术效果:
68、1.在对划船机启动信息进行获取后,对是否接收到实景模拟输入信息进行判断,当接收到时,通过实景模拟输入信息,分析获取实景模拟控制方案,并执行实景模拟控制方案,当未接收到时,输出预设的普通模拟控制方案,并执行普通模拟控制方案,从而使专业赛艇等专业人士在采用风阻划船机进行训练时可以感受到如实际赛艇在水面上进行划动时的感觉,进而提高专业人士采用风阻划船机进行训练时的训练效果;
69、2.通过随机选出单次摇晃持续时间及单次摇晃控制信息,并将单次摇晃持续时间及单次摇晃控制信息发送至预设于机体上的摇晃装置,再对控制初始时间与当前时间进行获取,并分析获取摇晃控制持续时间,再对摇晃控制持续时间是否小于单次摇晃持续时间进行判断,只有当不小于时,重新随机选取单次摇晃持续时间及单次摇晃控制信息,并将单次摇晃持续时间及单次摇晃控制信息发送至预设于机体上的摇晃装置,从而使风阻划船机进行随机的晃动;
70、3.通过对拉手件实时位置点进行获取,通过最终摇晃基准位置点分析获取机体实时轴线,通过拉手件实时位置点及阻力机构缆线出口位置点分析获取拉手件实时轴线,再对拉手件实时轴线与机体实时轴线是否处于平行状态进行判断,当处于同一平面内时,通过拉手件第一实时停顿位置点及拉手件第二实时停顿位置点分析获取停顿位置训练信息,并将停顿位置训练信息发送至预设于机体上的显示装置,当不处于同一平面内时,通过拉手件实时位置点、拉手件实时轴线及机体实时轴线分析获取拉手件实时偏差值,再通过拉手件实时偏差值分析获取拉手件偏差提醒信息,并将拉手件偏差提醒信息发送至预设于机体上的显示装置,从而方便操作者在通过风阻划船机进行训练时,可以及时地对自己的训练状态进行了解,进而方便操作者及时进行调整。
- 还没有人留言评论。精彩留言会获得点赞!