一种多维人体失衡模拟训练装置
本技术涉及医疗器械,尤其是涉及一种多维人体失衡模拟训练装置。
背景技术:
1、在医学领域,平衡能力对于人体的日常生活活动十分重要,目前有很多脑卒中、颈椎病、帕金森、脊髓损伤、创伤性脑损伤等疾病患者,部分丧失了自身平衡的控制能力,这将在不同程度上影响其日常生活活动的能力。随着人口老龄化的发展,庞大的老年人群常常患有骨质疏松和软组织退行性病变,极易出现因站立、行走时发生跌倒的现象,导致骨骼与软组织的二次受伤。研究表明,针对平衡的模拟训练是改善被训练者躯干控制、动态坐姿平衡、站立平衡和步态的一种有效策略。而在运动训练领域,许多体育运动项目都对运动员的静态平衡能力和动态平衡能力有比较高的要求,因此精准的监控运动员的平衡能力可以实时的了解运动员的状态并及时反馈训练的效果,也可以在运动员的选拔中发挥作用。而提升运动员的平衡能力是许多体育项目中必不可少的环节,因此个性化的平衡训练在运动训练领域也发挥着重大作用。
2、现有针对平衡训练的机构往往训练动作少、训练模式单一,不能与日常生活中的具体动作结合起来进行针对性的训练,如针对坐电梯头晕、上下自动扶梯易摔倒等生活碰到的问题,如何模拟电梯的失重、超重,如何模拟滑倒等动作,进行针对性的训练;另外,其所用减重方法采用电控方式,不仅控制难度高而且因系统响应时间问题难以及时跟随人体重心变化提供实时所需的减重重量。
技术实现思路
1、为了解决上述问题,本实用新型的目的是提供一种多维人体失衡模拟训练装置,包括支撑架、支撑平台、垂向加速机构和随动减重机构;其中支撑平台选自动平台或旋转平台中的一种;使用时,动平台与垂向加速机构组合在一起,可实现左右摆动、前后摆动、摇晃运动及上升下降运动;旋转平台与垂向加速机构组合在一起,可实现左右摆动、前后摆动、平旋运动、上升下降运动及上述运动的组合叠加。被训练者站立在动平台或旋转平台上,通过组合训练满足多维人体失衡状况的模拟训练需求。
2、本实用新型的目的可以通过以下技术方案来实现:
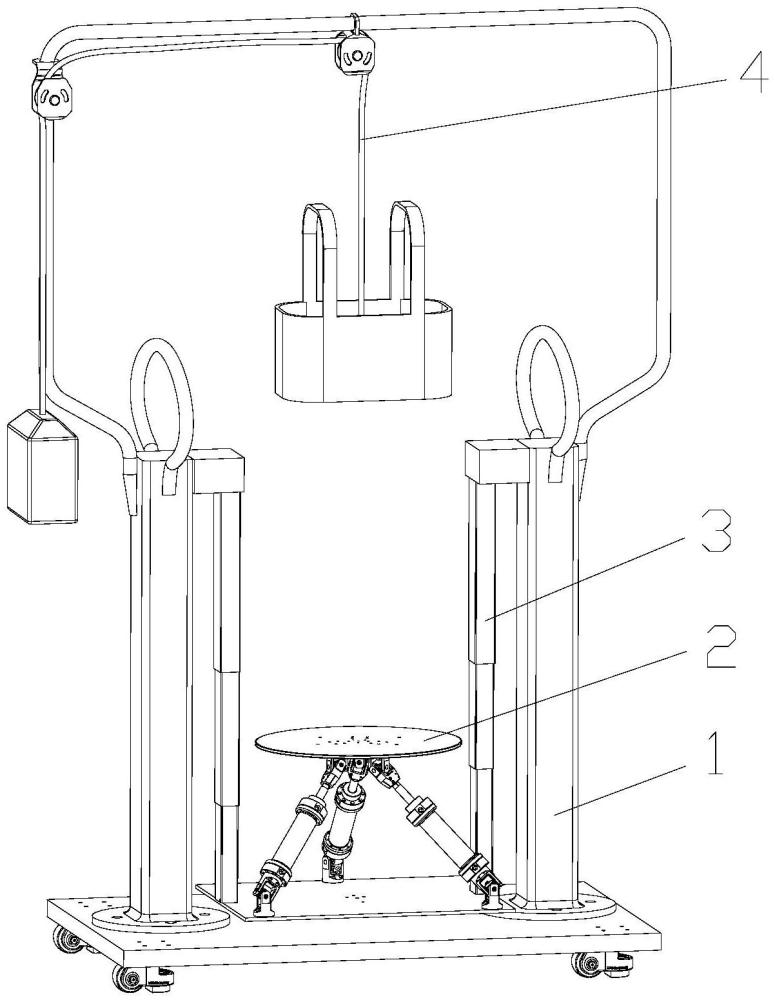
3、本实用新型提供一种多维人体失衡模拟训练装置,使用时与外部显示控制器相连接,包括支撑架、支撑平台、垂向加速机构和随动减重机构;
4、所述支撑平台设置于支撑架上方,所述垂向加速机构底端与支撑平台相连接,顶端与支撑架相连接,所述随动减重机构设置于支撑架顶端;所述支撑平台与外部显示控制器相连接;
5、所述支撑平台选自动平台或旋转平台中的一种;
6、所述支撑架用于支撑支撑平台、垂向加速机构和随动减重机构;
7、所述支撑平台与垂向加速机构相组合,当支撑平台为动平台时,动平台与垂向加速机构组合用于为被训练者提供左右摆动、前后摆动、摇晃运动以及上升下降运动的模拟训练;当支撑平台为旋转平台时,为被训练者提供左右摆动、前后摆动、平旋运动、上升下降运动以及上述4种运动的任意组合的模拟训练;
8、所述随动减重机构用于固定被训练者,并为被训练者提供减重重量。
9、在本实用新型的一个实施方式中,所述支撑架包括万向轮、基板、支撑立柱、扶手、安装座和承重座,万向轮设置于基板下底面,基板上表面沿其长度方向对称设置有支撑立柱,支撑立柱相互靠近的侧面上端设置有承重座,支撑立柱上设置有承重座的对侧设置有安装座,支撑立柱顶端还设置有扶手。
10、在本实用新型的一个实施方式中,所述万向轮设置有四个。
11、在本实用新型的一个实施方式中,所述扶手呈圆弧形,端口的两侧分别与支撑立柱上端的两个相向的侧面(前后两个侧面)相配合。
12、在本实用新型的一个实施方式中,垂向加速机构为两个与支撑立柱相平行的伸缩立柱,
13、当支撑平台为动平台时,所述伸缩立柱顶端与承重座下表面固定连接,底端与动平台相连接;
14、当支撑平台为旋转平台时,一个伸缩立柱的顶端与承重座固定连接,底端与旋转平台相连接;另一个伸缩立柱的顶端与承重座活动连接,底端与旋转平台相连接。
15、在本实用新型的一个实施方式中,当支撑平台为动平台时,两个伸缩立柱可以在垂向同步加速、同步减速或同步匀速伸缩,从而两个伸缩立柱同时变长变短;
16、当支撑平台为旋转平台时,两个伸缩立柱可在垂向不同步进行加速、不同步减速或不等长匀速伸缩,从而驱动摆动板在垂向上下运动及在左右向摆动运动。
17、在本实用新型的一个实施方式中,所述随动减重机构包括悬吊架、第一滑轮、第二滑轮、拉绳、可调减重包和捆绑绑带,所述悬吊架通过安装座与支撑立柱顶端固定连接,所述第一滑轮与第二滑轮安装在支撑架上,所述拉绳的一个端部与捆绑绑带相连接,依次绕过第一滑轮和第二滑轮,另一个端部与可调减重包相连接。
18、在本实用新型的一个实施方式中,所述可调减重包用于为被训练者提供所需减重重量;所述捆绑绑带用于固定被训练者。
19、在本实用新型的一个实施方式中,所述动平台包括第一脚板、并联驱动组件和底板,所述并联驱动组件的一个端部通过下连接头与底板相连接,另一个端部通过上连接头与第一脚板相连接。
20、在本实用新型的一个实施方式中,所述旋转平台包括平旋机构和前后摆动机构,所述平旋机构设置于前后摆动机构上,前后摆动机构通过左连接头和右连接头与伸缩立柱的底端相连接。
21、在本实用新型的一个实施方式中,所述前后摆动机构包括摆动板、第一连接座、前后摆动电机、左电机座、右连接座和第二连接座,
22、所述第一连接座和第二连接座对称设置于摆动板上表面,所述左电机座设置于第一连接座远离第二连接座的一侧,所述前后摆动电机设置于左电机座远离第一连接座的一侧,所述右连接座设置于第二连接座远离第一连接座的一侧;
23、所述左电机座顶部设置有可转动连接的左连接头,右连接座顶部设置有可转动连接的右连接头。
24、在本实用新型的一个实施方式中,所述平旋机构包括第二脚板、蜗轮、驱动轴、平面轴承、支撑座、随动电机座、平旋电机、软轴、轴承座和蜗杆,
25、所述驱动轴固定于第二脚板中心位置,并位于摆动板的中心位置且与摆动板可旋转连接,蜗轮固定于驱动轴上,并与蜗杆啮合连接,蜗杆以轴承座为支撑,第二脚板固定在驱动轴顶部,支撑座的底端固定在摆动板的上表面,支撑座的顶端通过平面轴承与第二脚板下表面可转动连接;所述随动电机座固定在第二连接座的第二转轴上且位于右连接座远离第二连接座的一侧,所述平旋电机设置于随动电机座上;平旋电机的转轴通过软轴与蜗杆相连接,从而平旋电机可驱动蜗杆转动,从而进一步驱动蜗轮转动以带动第二脚板转动。
26、在本实用新型的一个实施方式中,所述第一连接座远离第二连接座的一侧设置有第一转轴,所述第一转轴穿过左电机座通过联轴器与前后摆动电机相连接,从而前后摆动电机可驱动摆动板进行前后摆动运动。
27、在本实用新型的一个实施方式中,所述第二连接座远离第一连接座的一侧设置有第二转轴,所述第二转轴穿过右连接座与随动电机座固定连接,平旋电机固定在随动电机座上;从而平旋电机可随摆动板一起做前后摆动运动。
28、与现有技术相比,本实用新型具有以下有益效果:
29、(1)通过垂向加速机构的左右伸缩立柱的加速减速运动,能够模拟实现人体失重、超重的训练;
30、(2)通过垂向加速机构的左右伸缩立柱的独立运动,能够实现人体的左右摆动运动及人体倾斜站立下的垂直升降运动;
31、(3)通过旋转平台与垂向加速机构的叠加运动,能够让站立其上的被训练者实现超重、失重或垂向匀速运动与被训练者前后摆动或水平面的平旋运动的叠加训练动作;
32、(4)通过随动减重机构,为被训练者及时提供实时的固定减重比,即可通过非智能控制的方法,在低成本下实现实时跟随被训练者姿态并提供相应减重的功能,以配合人体减重训练。
- 还没有人留言评论。精彩留言会获得点赞!