一种基于机器视觉的五子棋人机对弈设备
本发明涉及五子棋对弈设备,特别是涉及一种基于机器视觉的五子棋人机对弈设备。
背景技术:
1、随着经济水平的稳步提高,人工智能技术、控制技术、机器视觉技术等多种先进技术逐步融入到人们的生活当中,同时随着科学技术的发展,多种先进技术之间的融合成为了一种发展趋势,对于智能化产品开发的需求逐步提高,应用的领域逐渐扩大,基于机器视觉的智能控制技术等融入智能产品的开发将会逐步增长。
2、目前人工智能行业得到了一定的发展,在人机对弈领域人工智能发挥着不可或缺的作用,但其核心的技术与其他先进技术的融合以及实际的产品需求结合仍是较大的问题。
3、目前大多数人机对弈类设备中所采用的现有技术存在着不足之处,采用霍尔传感器和光敏传感器结合磁性和光来确定棋盘上棋子的种类和位置,此种方法受外界因素影响较大,位置信息判断准确度不稳定,且棋盘和棋子需要通过特别制作,采用手动摆放棋子的位置以供执行部件取棋未免繁琐且效率低下,自动化程度低。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种基于机器视觉的五子棋人机对弈设备,摄像头实时采集棋局图片,获取棋盘上的棋子的种类和位置,棋子种类判断精准,定位准确,供棋组件提高了送棋的效率,减少了手动摆放棋子的麻烦,x轴直线模组和z轴直线模组同时伴随着y轴直线模组使真空吸盘位于落子点位处,真空吸盘完成吸棋以及放棋,完成人机对弈的功能需求。
2、为解决上述技术问题,本发明提供如下技术方案:
3、一种基于机器视觉的五子棋人机对弈设备,包括:
4、棋盘组件,包括棋盘和摄像头,所述摄像头位于棋盘的顶面上方,通过所述摄像头采集棋盘上的棋局图像;
5、供棋组件,包括用于放置棋子的供棋盒以及供棋盒底部下方的供棋装置旋转盘,通过所述供棋装置旋转盘的旋转实现供棋盒内棋子的移出;
6、执行组件,包括真空吸盘、x轴机构、z轴机构和y轴机构,所述真空吸盘用于棋子的抓取与释放,所述真空吸盘安装于z轴机构上,通过所述z轴机构实现真空吸盘在z轴上的运动,所述z轴机构安装于x轴机构上,通过所述x轴机构实现z轴机构在x轴上的运动,所述棋盘安装于y轴机构上,通过所述y轴机构实现棋盘在y轴上的运动。
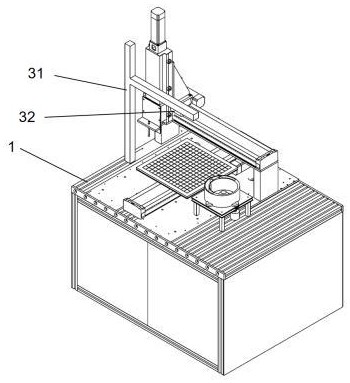
7、作为本发明所述一种基于机器视觉的五子棋人机对弈设备的优选方案,其中:所述棋盘组件还包括人机对弈工作台,所述人机对弈工作台的顶部连接设置有摄像头支撑架,所述摄像头安装于摄像头支撑架上。
8、作为本发明所述一种基于机器视觉的五子棋人机对弈设备的优选方案,其中:所述供棋组件还包括供棋装置支撑架、供棋装置底板、供棋装置上板和锥形块,所述供棋装置支撑架连接固定于人机对弈工作台的顶部,所述供棋装置底板连接固定于供棋装置支撑架的顶部,所述供棋装置上板位于供棋装置底板的正上方,且所述供棋装置上板与供棋装置底板的端角之间连接设置有中间固定块,所述供棋装置旋转盘转动嵌于供棋装置上板,所述供棋盒连接于供棋装置上板的顶部且位于供棋装置旋转盘的上方,所述供棋盒为上下开口的中空筒体,所述锥形块安装于供棋盒的内部且下端活动穿透于供棋装置旋转盘与供棋装置底板连接,所述供棋装置上板的顶面位于供棋装置旋转盘的外缘设置有出棋轨道,通过所述锥形块实现供棋盒内的棋子分布于供棋装置旋转盘的顶面边缘,通过所述供棋装置旋转盘的旋转实现棋子沿供棋装置上板的出棋轨道从供棋盒的内部移出。
9、作为本发明所述一种基于机器视觉的五子棋人机对弈设备的优选方案,其中:所述供棋组件还包括减速电机和旋转盘从动齿轮,所述旋转盘从动齿轮同轴连接于供棋装置旋转盘的底部,所述旋转盘从动齿轮与供棋装置底板之间连接有回转支撑轴承,所述减速电机安装于供棋装置底板,且所述减速电机的输出轴连接有与旋转盘从动齿轮相啮合的减速电机主动齿轮。
10、作为本发明所述一种基于机器视觉的五子棋人机对弈设备的优选方案,其中:所述供棋组件还包括光纤传感器,所述供棋装置上板的出棋轨道的末端安装设置有光纤传感器固定块,所述光纤传感器安装于光纤传感器固定块上,所述光纤传感器固定块的输出信号反馈至减速电机的控制开关。
11、作为本发明所述一种基于机器视觉的五子棋人机对弈设备的优选方案,其中:所述x轴机构包括x轴直线模组、x轴伺服电机和x轴限位传感器,所述x轴直线模组的底部连接设置有x轴直线模组固定板,所述x轴直线模组固定板与人机对弈工作台的顶部之间连接有x轴直线模组固定板支撑块,所述x轴直线模组的一端连接设置有x轴伺服电机固定板,所述x轴伺服电机安装于x轴伺服电机固定板上,所述x轴直线模组的丝杆上安装设置有第一同步带轮,所述x轴伺服电机的输出轴上安装设置有第二同步带轮,所述第二同步带轮与第一同步带轮之间连接设置有第一同步带,所述x轴直线模组的侧面连接设置有x轴限位传感器固定块,所述x轴限位传感器安装于x轴限位传感器固定块上,并所述x轴限位传感器的输出信号反馈至x轴直线模组的控制开关。
12、作为本发明所述一种基于机器视觉的五子棋人机对弈设备的优选方案,其中:所述z轴机构包括z轴直线模组、z轴伺服电机和z轴限位传感器,所述x轴直线模组的滑块上连接设置有z轴直线模组固定块,所述z轴直线模组安装于z轴直线模组固定块上,所述z轴直线模组的顶端连接设置有z轴伺服电机固定块,所述z轴伺服电机安装设置于z轴伺服电机固定块上,所述z轴伺服电机与z轴直线模组之间连接有联轴器,所述z轴直线模组的侧面连接设置有z轴限位传感器固定块,所述z轴限位传感器安装于z轴限位传感器固定块上,并所述z轴限位传感器的输出信号反馈至z轴伺服电机的控制开关。
13、作为本发明所述一种基于机器视觉的五子棋人机对弈设备的优选方案,其中:所述z轴直线模组的滑块上连接设置有真空吸盘固定块,所述真空吸盘安装于真空吸盘固定块上。
14、作为本发明所述一种基于机器视觉的五子棋人机对弈设备的优选方案,其中:所述y轴机构包括y轴直线模组、y轴伺服电机和y轴限位传感器,所述y轴直线模组连接固定于人机对弈工作台的顶部,所述y轴直线模组的一端连接设置有y轴伺服电机固定板,所述y轴伺服电机安装于y轴伺服电机固定板上,所述y轴直线模组的丝杆上安装设置有第三同步带轮,所述y轴伺服电机的输出轴上安装设置有第四同步带轮,所述第四同步带轮与第三同步带轮之间连接设置有第二同步带,所述y轴直线模组的侧面连接设置有y轴限位传感器固定块,所述y轴限位传感器安装于y轴限位传感器固定块上,并所述y轴限位传感器的输出信号反馈至y轴伺服电机的控制开关。
15、作为本发明所述一种基于机器视觉的五子棋人机对弈设备的优选方案,其中:所述y轴直线模组的滑块上连接设置有棋盘固定板,所述棋盘连接于棋盘固定板的顶部。
16、与现有技术相比,本发明能达到的有益效果是:
17、x轴直线模组和z轴直线模组同时伴随着y轴直线模组使真空吸盘位于落子点位处,真空吸盘完成吸棋以及放棋,完成人机对弈的功能需求,下棋位置能够稳定的落在棋盘的角点处,整体控制精准;
18、采用摄像头实时采集棋局图片,获取棋盘上的棋子的种类和位置,完成当前棋子点位信息获取的工作,相比借用传感器来确定棋子的位置和种类,棋子种类判断精准,定位准确;
19、对棋子的供给通过供棋装置旋转盘在减速电机的驱动下进行旋转从而使棋子沿着供棋装置上板的出棋轨道运动,并配合光纤传感器使棋子移动到取棋位置时停止减速电机的转动,提高了送棋的效率,减少了手动摆放棋子的麻烦,完成棋子的自动供给工作;
20、整个设备在人机对弈时,通过三个直线模组的运动,运行稳定,工作效率高,满足人机对弈的功能需求,棋子点位信息获取精准,能够在面对不同人群时完成人机对弈,设备运行稳定,实用性强。
- 还没有人留言评论。精彩留言会获得点赞!