一种刨光木块智能分切分级生产线的制作方法
1.本发明属于木块加工技术领域,具体涉及一种刨光木块智能分 切分级生产线。
背景技术:
2.在橡胶木备料生产过程中,需要对切断并刨光后各尺寸规格的物 料进行外观缺陷检测,并根据相应木块表面质量等级标准判定刨光料 的等级,如aa类、ab类、bc类、切头料类等,一般情况下根据刨光 后木块表面是否有伤疤、伤疤的位置,几个面有伤疤进行分级。
3.分级完成的aa类、ab类、bc类的木块通过踢料机构踢料到不停 的木块存储料斗后由人工进行码垛,但是对于切头料需要继续进行切 除处理,
4.目前采用将切头料挑选出来以后,需要人工在电锯上进行切割, 将具有伤疤或者缺陷的部分切除,剩下好的木料再进行分级处理。人 工切割切头料效率非常低,且切除以后还需要人工进行分级处理后放 置到不同的料区,人工分级对工作人员要求较高,人力成本高,其容 易出现分错级别的现象。人工作业易产生疲劳,生产效率低。
技术实现要素:
5.本发明的目的是克服现有技术中存在的人工切料分级作业 易产生疲劳、容易出现错检漏检现象且生产效率低的缺陷,提 供一种对切头料进行自动检测分析、自动切料、自动踢料的刨 光木块智能分切分级生产线。
6.本发明解决其技术问题所采用的技术方案是:
7.一种刨光木块智能分切分级生产线,其特征在于:包括用 于将木块单块甩出的离心机、与所述离心机的甩出口对接的第 一输送带、与所述第一输送带对接的第二输送带、与所述第二 输送带对接的第三输送带、设置在所述第二输送带上的缺陷检 测机构、设置在第三输送带输出端的锯切机、与所述锯切机的 输出端对接的第四输送带、设置在所述第四输送带左右两侧的 多个踢料机构;所述第二输送带的线速度大于所述第一输送带 的线速度;所述第二输送带上具有第一检测区,所述第一检测 区的前、后、左、右和上方均设置有朝向第一检测区的面阵相 机;所述第二输送带和所述第三输送带之间的缝隙上方为第二 检测区;所述第二检测区的下方设置有线阵相机;所述锯切机 包括并排设置的多个齿辊、设置在所述齿辊的正上方具有可升 降的多块压块,每块所述压块上安装有多个与所述齿辊相对的 辊筒;其中两个齿辊之间具有切割缝隙,切割缝隙处设置可升 降的切割锯。
8.进一步地,所述锯切机还包括第一机架、转动安装在所述 第一机架上的旋转板、安装在所述第一机架上的第一电机、连 接在所述第一电机上的偏心轮以及旋转拉杆,所述旋转拉杆的 一端连接在所述偏心轮上,另一端转动连接在所述旋转板上; 通过第一电机带动偏心轮转动进而拉动旋转板旋转,使切割锯 上下运动实现对木块的切割;所述旋转板上安装有第二电机, 第二电机通过带传动带动所述切割锯旋转。
9.进一步地,每个所述齿辊转轴的端部具有从动带轮,所述 锯切机还包括安装在所
述第一机架上的第三电机;所述第三电 机的输出轴上安装有驱动带轮;所述驱动带轮通过带传动同时 驱动两个相邻的齿辊上的从动带轮转动。
10.进一步地,相邻的齿辊端部的从动带轮之间通过带传动; 在所述切割缝隙两侧的第一机架的上部设置两个避让带轮,两 个避让带轮之间通过带传动,切割缝隙两侧的从动带轮分别与 其正上方的避让带轮带传动连接。
11.进一步地,所述齿辊包括第一转轴和间隔固定在所述第一 转轴上的多个齿轮;相邻齿辊的齿轮相互交错嵌入设置。
12.进一步地,所述面阵相机和线阵相机侧面具有对着相机镜 头附近吹气的吹气嘴。
13.进一步地,所述第一检测区位于暗箱内,第一检测区的上 方设置有四个第一光源,四个第一光源呈四边形设置在第一检 测区的周围。面阵相机和第一光源均通过吊杆吊设在暗箱的上 盖板上。
14.进一步地,所述第三输送带上具有对木块导正直至输送到 锯切机的第二导向板,所述第二导向板,所述第三输送带安装 在第二机架上,所述第二导向板通过可调支架安装在所述第二 机架上,所述第二导向板的外侧面具有第二滑槽,所述可调支 架包括:第二直角支架和第三直角支架;所述第二直角支架的 竖直面与所述第二机架固定连接,水平面与所述第三直角支架 的水平面通过第三固定螺栓固定;所述第二直角支架的水平面 上具有多个固定孔;所述第三直角支架的水平面上具有多个长 孔;通过第三固定螺栓穿过长孔和固定孔调整第三直角支架伸 入到所述第三输送带上的长度;所述第二滑槽内滑动安装有多 个第四固定螺栓的螺帽,所述第四固定螺栓的螺柱穿过所述第 三直角支架的竖直面并通过螺母将所述第二导向板固定在所述 第三直角支架上。
15.进一步地,所述踢料机构包括第四机架、固定安装在第四 输送带一侧的伸缩气缸以及设置在第四输送带另一侧的木块暂 存料斗;伸缩气缸一侧的第四机架上固定安装有安装架,安装 架的上部具有长条形通孔;长条形通孔内可调节安装有第一调 节杆,第一调节杆通过从长条形通孔的外壁面穿入长条形通孔 内的第一固定螺钉顶紧第一调节杆对第一调节杆定位;第一调 节杆的端部固定连接有挡料板;挡料板位于木块暂存料斗内且 与伸缩气缸的伸缩端相对设置;伸缩气缸的伸缩端将木块推入 木块暂存料斗内。
16.更进一步地,木块暂存料斗的底面包括与第三输送带的侧 面边缘对接的倾斜导向面和用来缓存木块的水平缓存面。
17.本发明的一种刨光木块智能分切分级生产线的有益效果是:
18.1、本发明通过离心机将切头料单块甩出,通过缺陷检测机 构对木块进行六个面拍照进而分析出木料的切头位置,切头后 木料的等级;再进入锯切机自动切料,最后通过多个踢料机构 将切料后的不同等级的木块踢料到不同的木块存储区;大大减 少了人力成本。
19.2、锯切机通过齿辊将木块向前运输,并且切割时通过升降 压块带动辊筒向下运动将木块压住,通过设置切割缝隙实现将 木块从下向上切割。
20.3、为了使木块准确进入锯切机,设置了第二导向板,两个 第二导向板的位置可通过可调支架调节,以适应不同宽度的木 块的导向。
21.4、通过伸缩气缸将木块快速踢料到木块暂存料斗中,同时 通过挡料板防止伸缩气缸将木块踢到木块暂存料斗外,将木块 暂存料斗的底面设置为倾斜导向面使木块可以
随着坡度自动下 落到水平缓存面,然后人工将挡料板后方的木块码垛在码垛板 上。
附图说明
22.下面结合附图和具体实施方式对本发明作进一步详细的说 明。
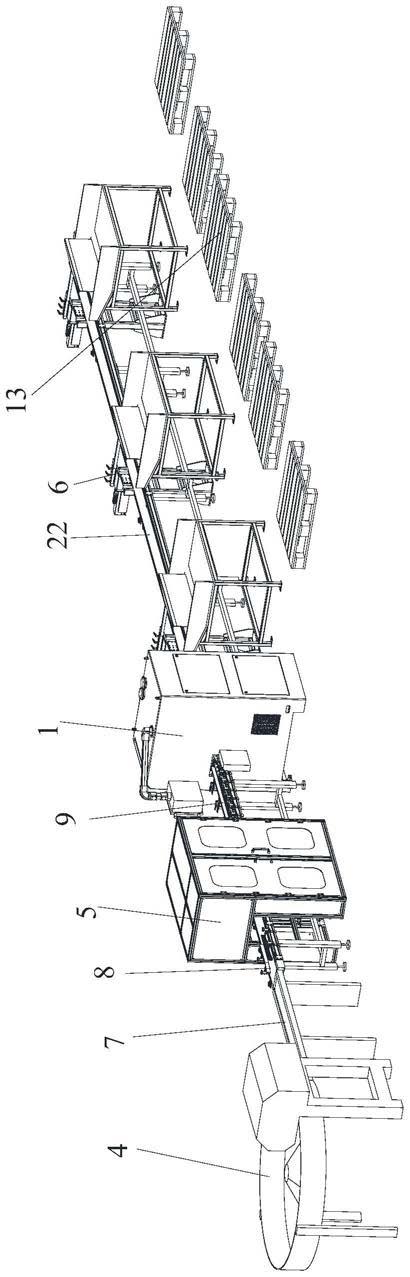
23.图1是本发明实施例整体结构图;
24.图2是本发明实施例的离心机结构图;
25.图3是本发明实施例的缺陷检测机构结构图;
26.图4是本发明实施例的缺陷检测机构缺省部分暗箱后结构 图;
27.图5是本发明实施例的缺陷检测机构另一视角立体图;
28.图6是本发明实施例的第二输送带结构图;
29.图7是本发明实施例的支架组件结构图;
30.图8是本发明实施例的部分结构图;
31.图9是本发明实施例的第二导向板连接结构图;
32.图10是本发明实施例的锯切机结构图;
33.图11是本发明实施例的锯切机另一视角结构图;
34.图12是本发明实施例的锯切机缺省部分结构后的立体图;
35.图13是本发明实施例的踢料机构结构图;
36.图14是本发明实施例的踢料机构另一视角结构图。
37.图中:1、锯切机,101、齿辊,1011、第一转轴,1012、齿 轮,102、压块,103、辊筒,104、切割缝隙,105、切割锯, 106、第一机架,107、第一电机,108、旋转板,109、第二电 机,110、偏心轮,111、旋转拉杆,112、第三电机,113、从动带 轮,114、避让带轮,115、升降气缸,4、离心机,401、甩出口,5、 缺陷检测机构,501、第三机架,502、第一安装槽,503、第一检测 区,504、面阵相机,505、线阵相机,506、第一滑槽,507、第一 直角支架,508、第一光源,509、第二光源,510、吹气嘴,511、 暗箱,512、第一导向板,513、第二检测区,514、第二调节杆,515、第二固定螺钉,516、安装螺帽,517、连接筒,5171,横 向调节孔,5172、竖向固定孔,518、吊杆,519、第一安装螺钉,520、 防倾垫片,6、踢料机构,61、第四机架,611、长条形安装槽,62、 第一固定螺钉,63、光电传感器,64、伸缩气缸,65、木块暂存料斗, 651、倾斜导向面,652、水平缓存面,66、安装架,661、长条形通 孔,67、第一调节杆,68、挡料板,681、弯折板,682、软皮垫,69、 踢料推板,7、第一输送带,8、第二输送带,9、第三输送带,10、 切头料输送带,11、木块,12、限位架,13、码垛板,14、切头料导 向板,15、转角导向块,151、导向弧面,17、第二导向板,171、第 二滑槽,18、第二机架,19、可调支架,191、第二直角支架,192、 第三直角支架,1921、长孔,20、第三固定螺栓,21、第四固定螺栓 22、第四输送带。
具体实施方式
38.现在结合附图对本发明作进一步详细的说明。这些附图均为简化 的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本 发明有关的构成。
39.如图1-图14所示的本发明的一种刨光木块智能分切分级生产线 的具体实施例,包括用于将木块单块甩出的离心机4、与离心机 4的甩出口对接的第一输送带7、与第一输送带7对接的第二输 送带8、与第二输送带8对接的第三输送带9、设置在第二输送 带8上的
缺陷检测机构5、设置在第三输送带9输出端的锯切机 1、与锯切机1的输出端对接的第四输送带22、设置在第四输送 带22左右两侧的多个踢料机构6;第二输送带8的线速度大于 第一输送带7的线速度;第二输送带8上具有第一检测区503, 第一检测区503的前、后、左、右和上方均设置有朝向第一检 测区503的面阵相机504;第二输送带8和第三输送带9之间的 缝隙上方为第二检测区513;第二检测区513的下方设置有线阵 相机505。
40.参见图2,离心机4正对第一输送带7处具有每次使一块木块 11甩出的甩出口401;第一输送带7左右两侧具有高于其的限位架 12。具体地,切头料被传送带运至离心机4内,离心机4通过 其离心作用将木块11一块块甩出。
41.第一输送带7与第二输送带8对接且第二输送带8的线速 度大于第一输送带7的线速度;利用两个输送带的速度差,使 木块11进入缺陷检测机构5前拉开一定的距离,保证每次检测 一个木块11。
42.参见图3-图6,缺陷检测机构5位于第二输送带8上,第 二输送带8安装在第三机架501上,第二输送带8上具有第一 检测区503,第一检测区503的前、后、左、右和上方均设置有 朝向第一检测区503的面阵相机504;第二输送带8的后方设置 有第三输送带9,第二输送带8和第三输送带9之间的缝隙上方 为第二检测区513;第二检测区513的下方设置有线阵相机505。
43.结合图3-图5,第一检测区503位于暗箱511内,第一检 测区503的上方设置有四个第一光源508,四个第一光源508 呈四边形设置在第一检测区503的周围。面阵相机504和第一 光源508均通过吊杆518吊设在暗箱511的上盖板上。
44.由于木块11被刨光后上面容易携带碎屑,为了保证相机镜 头的清晰度,面阵相机504和线阵相机505侧面具有对着相机 镜头附近吹气的吹气嘴510。
45.第三机架501上安装有相对第二检测区513设置的第二光 源509,线阵相机505和对着线阵相机505的镜头吹气的吹气嘴 510均安装在第三机架501上。
46.参见图6,木块11进入第一检测区503前的第二输送带8 上具有两相对设置的第一导向板512,两相对设置的第一导向板 512后端向外开口,前端相互平行。通过第一导向板512将木块 11导向到第二输送带8的正中央,进而进入第一检测区503的 正中央。
47.参见图6和图7,第三机架501的左右两侧具有第一安装槽 502,第一导向板512通过支架组件安装在第二输送带8上方, 支架组件包括第一直角支架507,第一直角支架507的一个侧面通过 第一安装螺钉519固定安装在第一安装槽502内,另一个侧面上固定 安装有连接筒517,连接筒517的上部具有横向调节孔5171和竖向 固定孔5172;第二调节杆514穿过横向调节孔5171并通过第二固定 螺钉515穿入竖向固定孔5172将第二调节杆514压紧。
48.可以将支架组件根据需要安装在长长的第一安装槽502内 的任意位置以调节第一导向板512的位置。
49.参见图6,第一导向板512的侧面具有第一滑槽506;第二 调节杆514的端部固定有安装螺帽516和防倾垫片520;安装螺 帽516从第一滑槽506的一端滑入第一导向板512,且防倾垫片 520抵靠在第一滑槽506的外壁面上防止第二调节杆514倾斜。 只需要沿第一滑槽506拉动第一导向板512,就可以将第一导向 板512从第一滑槽506中拉出,方便拆卸。
50.面阵相机504、线阵相机505拍摄的照片发送给控制器,控 制器通过图像对比分析
得出木块11的哪个面具有缺陷以及确定 缺陷的位置,并分析出需要在木块的哪个位置进行切割,然后 发送命令给锯切机。
51.缺陷检测机构5的工作过程为:
52.木块11通过第一导向板512导向到合适位置后进入暗箱 511内,暗箱511内的五个面阵相机504对木块11的前、后、 左、右、上五个面进行拍照后发送给控制器,当木块11运动到 第二输送带8和第三输送带9的缝隙处时,线阵相机505对木 块11的下侧面进行扫描拍照后发送给控制器,控制器对图片分 析对比后得出哪个面具有缺陷以及缺陷的的位置,进而得出需 要对切头料切割的位置,发送命令给锯切机。
53.参见图8和图9,在木块11从缺陷检测机构出来以后,需 要在第三输送板9上将木块11导正,保证木块11对准锯切机1 的中央进入锯切机1,第三输送带9上具有对木块11导正直至 输送到锯切机1的第二导向板17,第二导向板17,第三输送带9安装在第二机架18上,第二导向板17通过可调支架安装在第 二机架18上,第二导向板17的外侧面具有第二滑槽171,可调 支架包括:第二直角支架191和第三直角支架192;第二直角支 架191的竖直面与第二机架18固定连接,水平面与第三直角支 架192的水平面通过第三固定螺栓20固定;第二直角支架191 的水平面上具有多个固定孔1911;第三直角支架192的水平面 上具有多个长孔1921;通过第三固定螺栓20穿过长孔1921和 固定孔1911调整第三直角支架192伸入到第三输送带9上的长 度;第二滑槽171内滑动安装有多个第四固定螺栓21的螺帽, 第四固定螺栓21的螺柱穿过第三直角支架192的竖直面并通过 螺母将第二导向板17固定在第三直角支架192上。两个第二导 向板17的位置可通过可调支架191调节,以适应不同宽度的木 块11的导向。
54.参见图10-12,锯切机1包括并排设置的多个齿辊101、设 置在齿辊101的正上方具有可升降的多块压块102,每块压块 102上安装有多个与齿辊相对的辊筒103;其中两个齿辊101之 间具有切割缝隙104,切割缝隙104处设置可升降的切割锯105。 锯切机1还包括第一机架106、转动安装在第一机架上的旋转板 108、安装在第一机架106上的第一电机106、连接在第一电机 106上的偏心轮110以及旋转拉杆111,旋转拉杆111的一端连 接在偏心轮110上,另一端转动连接在旋转板108上;通过第 一电机106带动偏心轮110转动进而拉动旋转板108旋转,使 切割锯105上下运动实现对木块的切割;旋转板108上安装有 第二电机109,第二电机109通过带传动带动切割锯105旋转。
55.每个齿辊101转轴的端部具有从动带轮113,锯切机1还包 括安装在第一机架106上的第三电机112;第三电机112的输出 轴上安装有驱动带轮;驱动带轮通过带传动同时驱动两个相邻 的齿辊101上的从动带轮113转动。相邻的齿辊101端部的从 动带轮113之间通过带传动;在切割缝隙104两侧的第一机架 106的上部设置两个避让带轮114,两个避让带轮114之间通过 带传动,切割缝隙两侧的从动带轮113分别与其正上方的避让 带轮114带传动连接。
56.齿辊101包括第一转轴1011和间隔固定在第一转轴1011 上的多个齿轮1012;相邻齿辊101的齿轮1012相互交错嵌入设 置。
57.压块102连接在升降气缸115的伸缩端,切割锯105位于 切割缝隙104下方,当木块11进入到锯切机内后,升降气缸115 的伸缩端收缩,木块跟随齿辊101向前运动需要切割的位置正 位于切割缝隙104的正上方,此时第三电机112停止转动使木 块11停止前进,升降
气缸115伸长带动压块向下运动,而使辊 筒103和齿辊101将木块11压住后,第一电机107和第二电机 109启动,第一电机107转动带动旋转拉杆111转动,进而使旋 转板108向上旋转,使切割锯105边从切割缝隙104内向上运 动边切割木块11。
58.参见图13和图14,踢料机构6包括第四机架61、固定安 装在第四输送带22一侧的伸缩气缸64以及设置在第四输送带 22另一侧的木块暂存料斗65;伸缩气缸64一侧的第四机架61 上固定安装有安装架66,安装架66的上部具有长条形通孔661; 长条形通孔661内可调节安装有第一调节杆67,第一调节杆67 通过从长条形通孔661的外壁面穿入长条形通孔661内的第一 固定螺钉62顶紧第一调节杆67对第一调节杆67定位;第一调 节杆67的端部固定连接有挡料板68;挡料板68位于木块暂存 料斗65内且与伸缩气缸64的伸缩端相对设置;伸缩气缸64的 伸缩端将木块11推入木块暂存料斗65内。木块暂存料斗65的 底面包括与第三输送带9的侧面边缘对接的倾斜导向面651和 用来缓存木块11的水平缓存面652。倾斜导向面651使木块11 可以随着坡度自动下落到水平缓存面652,这样人工将挡料板 68后方的木块11码垛在码垛板13上。
59.通过调节第一调节杆67在长条形通孔661内的长度可以调 节挡料板68靠近第三输送带9的距离,以满足对不同踢料强度 踢出的木块11的阻挡。
60.挡料板68包括与第一调节杆67固定连接的弯折板681以 及固定在弯折板681下部的软皮垫682。软皮垫682可采用透明 pu材料或者橡胶材料,优选透明pu材料,工人可以边码垛边观 察倾斜导向面651上存有对的木块11的量。软皮垫682一方面 阻挡伸缩气缸64踢出的木块11到木块暂存料斗65的前部,另 一方面存在倾斜导向面651上的木块11从软皮垫682的下部滑 落到水平缓存面652上,木块11不断的自动向工人码垛方向推 送。
61.伸缩气缸64的输出端固定连接有踢料推板69。通过具有一 定厚度和长度的踢料推板69保证能够向前平稳的推动木块11, 而不会在踢料的过程中造成木块11的倾斜而飞出木块暂存料斗 65。
62.为了便于根据需要在第三输送带9的两侧任意位置安装需 要的装置和零部件,第四机架61的左右两侧设置有长条形安装 槽611;安装架66通过螺栓固定安装在长条形安装槽611的任 意位置,这样被缺陷检测机构5检测后分级的不同级别的木块 11通过不同的踢料机构6踢出,踢料机构6之间对的距离可以 根据需要安装在长条形安装槽611内的任意位置。
63.同时,木块11进入伸缩气缸64位置前的第三输送带9的 两侧安装有用来检测木块11是否到位的光电传感器63;光电传 感器63安装在长条形安装槽611内,并根据木块11的长度可 适应性的调整与伸缩气缸64的距离。
64.本发明的踢料机构6的工作过程为:
65.控制器分析出切头料被切头以后的料的等级,然后发送信 号给不同的踢料机构6,待锯切机1切头以后,踢料机构6对相 应的来料进行踢料,分为等级料和废料,当木块11到位以后, 伸缩气缸64快速伸缩,将木块11踢出到木块暂存料斗65中, 踢出的木块11在挡料板68的软皮垫682作用下掉落在木块暂 存料斗65的倾斜导向面651上,然后下滑入水平缓存面652上, 随着软皮垫682前方的木块11不断增加,软皮垫682后方的木 块11不断自动向后推送,木块暂存料斗65后的工作人员将木 块11码垛到码垛板13上。
66.应当理解,以上所描述的具体实施例仅用于解释本发明, 并不用于限定本发明。
由本发明的精神所引伸出的显而易见的 变化或变动仍处于本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1