一种实现自由开合的下牵拉机构的制作方法
1.本发明属于横编织机技术领域,具体地说是一种实现自由开合的下牵拉机构。
背景技术:
2.随着横编织机使用越来越广泛,人们对电脑横机的性能要求也是越来越高。在横编织机中,需要通过牵拉机构牵拉织物来增加编织的稳定性,因此下牵拉机构的稳定性非常重要直接影响了织物的合格率,目前大多数牵拉机构主要通过人工操作开合手柄来实现机构的开合,这种结构需要工人手动操作无法实现自由开合、稳定性差。
3.因此,目前急需一种能够自动开合的下牵拉机构,实现牵拉辊的开闭自动化,下牵拉机构结构更加简单、运行更加稳定、结构更加合理。
技术实现要素:
4.为了克服现有技术上的问题,本发明提供了一种实现自由开合的下牵拉机构,牵拉辊构件与两组主动开合杆和从动开合杆分别连接,两个开合电机各自驱动主动开合杆与从动开合杆之间的开闭,从而带动牵拉辊开闭,再由两个步进电机各自控制一个牵拉辊旋转夹持并牵拉织物。
5.本发明提供以下技术方案:
6.一种实现自由开合的下牵拉机构,包括通过支板反向安装在墙板上的第一牵拉辊和第二牵拉辊,第一牵拉辊的两端分别连接主动开合杆和从动开合杆、第二牵拉辊的两端分别连接从动开合杆和主动开合杆,开合电机分别驱动两端的主动开合杆与从动开合杆之间开闭运动,从而带动第一、第二牵拉辊开闭运动。
7.进一步地,第一、第二牵拉辊分别设有步进电机,步进电机通过驱动带轮机构,从而带动牵拉辊上的齿轮转动,第一、第二牵拉辊旋转完成牵拉织物。
8.进一步地,所述主动开合杆通过辅助轴连接在墙板上,主动开合杆与辅助轴周向固定;所述从动开合杆通过转动轴连接在墙板上,从动开合杆和主动开合杆相互连接,主动开合杆能够发生一定角度摆动,带动从动开合杆相互张开或者闭合,从动开合杆和主动开合杆的顶端通过拉簧连接。
9.进一步地,在主动开合杆上设有开合轴承,所述开合电机的输出轴端设置有开合凸轮,开合凸轮运动能够抵触所述开合轴承。
10.进一步地,所述开合电机旁设有磁感应器,用于感应从动开合杆上的磁钢,从动开合杆张开到最大角度时,从动开合杆上的磁钢与磁感应器发生感应。
11.进一步地,所述步进电机输出轴端设有主动齿轮,传动轴外侧设有从动齿轮,主动齿轮与从动齿轮相互啮合;传动轴内侧设有所述从动开合杆和主动带轮,主动带轮与传动轴为周向固定,牵拉辊的端部设有从动带轮,主动带轮、从动带轮上套接有同步带,张紧轮设置在从动开合杆上。
12.采用上述技术方案,本发明具有如下有益效果:
13.(1)本发明的下牵拉机构实现下牵拉机构的自由开合,下牵拉机构开合电机控制凸轮旋转可实现自由开合,针对织物厚度不同的情况还可以调节开合角度,步进电机控制牵拉辊旋转使作用在织物上的拉力保持恒定。
14.(2)本发明的下牵拉机构采用电机驱动代替人工手动操作增加了工作效率,步进电机控制牵拉辊旋转、开合电机控制牵拉辊开合互不影响双电机控制大大提高了机构稳定性。
附图说明
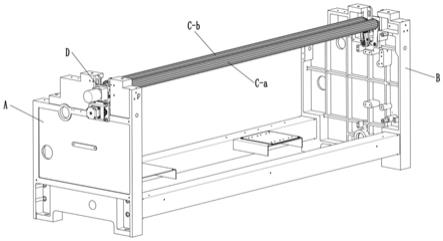
15.图1为本发明所述的下牵拉结构示意图。
16.图2为本发明所述的牵拉组件结构示意图。
17.图3为本发明所述的开合组件结构示意图。
18.图4为本发明所述的下牵拉机构张开时的结构示意图。
19.图5为本发明所述的下牵拉机构张闭合的结构示意图。
20.其中:a左墙板;b右墙板;c
‑
a第一牵拉辊构件;c
‑
b第二牵拉辊构件;d开合组件;c
‑
1a第一牵拉辊;c
‑
1b第二牵拉辊;c
‑
2从动带轮;c
‑
3主动带轮;c
‑
4牵拉辊转轴;c
‑
5同步带;c
‑
6张紧轮;c
‑
7从动开合杆;c
‑
8主动开合杆;c
‑
9开合轴承;c
‑
10拉簧;c
‑
11传动轴;c
‑
12辅助轴;c
‑
13从动齿轮;c
‑
14主动齿轮;c
‑
15支板;c
‑
16电机固定板;c
‑
17步进电机;c
‑
18织物;d
‑
1开合电机;d
‑
2电机支板;d
‑
3开合凸轮;d
‑
4磁感应器。
具体实施方式
21.为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的结构图及具体实施例仅用以解释本发明,并不用于限定本发明。
22.实施例1
23.本发明提供了一种实现自由开合的下牵拉机构,如图1、2所示,包括通过支板c
‑
15反向安装在墙板上的第一牵拉辊c
‑
1a和第二牵拉辊c
‑
1b。第一牵拉辊的两端分别连接主动开合杆c
‑
8和从动开合杆c
‑
7、第二牵拉辊的两端分别连接从动开合杆和主动开合杆,开合电机d
‑
1分别驱动两端的主动开合杆与从动开合杆之间开闭运动,从而带动第一、第二牵拉辊开闭运动。
24.本发明在第一、第二牵拉辊都安装有开合电机,在电机的驱使下可以同时开合,针对织物厚度不同的情况还可以调节开合角度,第一、第二牵拉辊都可以摆动一定角度,在起底板上升时可以有更大的让位空间。
25.实施例2
26.如图4、5所示,主动开合杆c
‑
8通过辅助轴c
‑
12连接在墙板上,主动开合杆与辅助轴周向固定;从动开合杆c
‑
7通过转动轴c
‑
11连接在墙板上,从动开合杆和主动开合杆相互连接,连接方法可以如图中所示,传动轴与从动开合杆之间设有轴承,通过底端相互啮合。主动开合杆在开合凸轮d
‑
3的驱使下能够一定角度摆动,并且带动从动开合杆相互张开或者闭合,从动开合杆和主动开合杆的顶端通过拉簧连接。
27.在主动开合杆上设有开合轴承c
‑
9,开合电机的输出轴端设置有开合凸轮d
‑
3,开
合凸轮运动能够抵触开合轴承,从而带动主动开合杆摆动。
28.开合电机旁设有磁感应器d
‑
4,用于感应从动开合杆上的磁钢,从动开合杆张开到最大角度时,从动开合杆上的磁钢与磁感应器发生感应,从而确定两个牵拉辊是否张开。
29.牵拉组件在工作时,首先由开合电机d
‑
1控制开合凸轮d
‑
3旋转,直至从动开合杆c
‑
7与磁感应器d
‑
4发生感应,此时开合凸轮d
‑
3最高点抵触开合轴承c
‑
9,使主动开合杆c
‑
8与从动开合杆c
‑
7张开,两组牵拉辊构件的牵拉辊c
‑
1处于张开状态,织物c
‑
18向下移动达到牵拉辊高度,再由开合电机d
‑
1控制开合凸轮d
‑
3旋转,开合凸轮d
‑
3最低点抵触开合轴承c
‑
9,使主动开合杆c
‑
8与从动开合杆c
‑
7在拉簧c
‑
10的作用下相互靠近,直至两个牵拉辊c
‑
1互相靠拢并啮合夹持织物c
‑
18。
30.实施例3
31.如图1
‑
3所示,本发明的牵拉机构在第一、第二牵拉辊上分别设有步进电机c
‑
17,步进电机通过驱动带轮机构,从而带动牵拉辊上的齿轮转动,第一、第二牵拉辊旋转完成牵拉织物。带轮机构包括传动轴、主动齿轮、从动齿轮。
32.步进电机输出轴端设有主动齿轮c
‑
14,传动轴外侧设有从动齿轮c
‑
13,主动齿轮与从动齿轮相互啮合;传动轴内侧设有从动开合杆和主动带轮,主动带轮c
‑
3与传动轴为周向固定,牵拉辊的端部设有从动带轮c
‑
2,主动带轮、从动带轮上套接有同步带c
‑
5,张紧轮设置在从动开合杆上。
33.步进电机c
‑
17带动主动齿轮c
‑
14旋转,主动齿轮c
‑
14与从动齿轮c
‑
13啮合带动传动轴c
‑
11和主动带轮c
‑
3一起旋转,利用带传动带动从动带轮c
‑
2旋转驱使两个牵拉辊c
‑
1一起旋转,牵拉织物c
‑
18向下移动。步进电机控制牵拉辊旋转使作用在织物上的拉力保持恒定。
34.以上所述实施例仅表达了本发明的实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1