一种不具有摆动座的缝纫机的制作方法
1.本技术提出一种不具有摆动座的缝纫机,具体涉及缝纫机技术领域。
背景技术:
2.在缝纫机的驱动机构中,缝纫机的机头上安装有主轴电机,主轴电机连接输出主轴,输出主轴上安装固定有传动凸轮,主轴电机以凸轮偏心转动驱动送布连杆和抬牙连杆运动向送布牙提供送布动力。送布连杆经摆动座组件带动送布轴按一定角度转动,抬牙连杆经抬牙曲柄带动抬牙轴按一定角度摆动;送布连杆及送布轴的摆动驱动送布牙架摆动从而为送布牙产生前后运动;抬牙连杆及抬牙轴摆动带动抬牙轴上的抬牙叉摆动从而使得送布牙产生上下运动,前后运动和上下运动组合形成了送布牙的送布动作。上述为送布牙提供动力的设置结构复杂,造价也较高。
3.针对针距控制的摆动座,许多企业提出了实现送布针距的智能化控制技术方案。有专利方案提出具有送布轴驱动源、连接曲柄、送布轴、送布牙架和送布牙,具有摆动杆,送布轴驱动源具有输出轴,输出轴上安装有摆动杆,摆动杆铰接连接曲柄,连接曲柄固定在送布轴,送布轴动连接送布牙架,送布牙架上固定有送布牙。实际上,该方案是利用送布轴驱动源驱动摆动杆来替代原有缝纫机的送布连杆,对针距调节机构实施针距调节以及对零位定位机构实施定位送布牙零点位置,起到了积极的针距调节技术效果。然而,对于抬牙连杆的运动还是停留在现有技术上,使得送布牙的上下送布动作无法达到智能控制水平。
技术实现要素:
4.针对现有缝纫机技术中结构复杂、制造成本高、维修装配不便以及对润滑系统依赖较大的不足,本技术提出一种不具有摆动座的缝纫机,具有驱动电机,驱动电机驱动送布牙机构,其特征在于,还具有运行轮,驱动电机连接的输出轴安装有运行轮,运行轮固定有曲柄,曲柄铰接第一连杆,第一连杆铰接第二连杆,第二连杆铰接第三连杆,第三连杆铰接送布曲柄,送布曲柄固定在送布轴上;在靠近送布牙一侧送布轴上安装有送布牙座,送布牙座上匹配铰接有送布牙架,送布牙架上固定安装有送布牙。
5.优选地,所述第二连杆上设置有通孔,固定轴穿设在通孔内部,固定轴固定在缝纫机上。
6.优选地,所述运行轮具有轴孔,驱动电机连接的输出轴穿设在轴孔内部,运行轮上设置有固定曲柄的连接部。
7.优选地,所述驱动电机驱动输出轴及运行轮使得曲柄左右摆动的角度发生改变,曲柄摆动角度越大则针距越大,曲柄摆动角度越小则针距越小。
8.优选地,所述驱动电机驱动输出轴上的运行轮,曲柄通过第一连杆、第二连杆和第三连杆将送布曲柄推到处于最低位置状态,再通过送布曲柄、送布轴、送布牙座、送布牙架以及送布牙,送布牙的牙尖处在针板上平面之下的送布牙零针距位置。
9.优选地,还具有剪线组件和抬压脚组件,剪线组件安装在缝纫机基板下,在控制系
统的控制下剪线组件启动剪线电磁铁执行剪线动作,在剪线完成后,由安装在缝纫机机头上的抬压脚电磁铁启动执行抬压脚动作。
10.优选地,所述驱动电机连接的输出轴上还安装有抬压脚凸轮和/或剪线曲柄。
11.优选地,所述剪线曲柄安装在输出轴靠近驱动电机一侧,抬压脚凸轮位于运行轮与剪线曲柄之间。
12.优选地,所述剪线组件具有剪线曲柄、剪线叉轮和剪线执行端,抬压脚组件具有抬压脚凸轮、抬压脚顶杆、抬压脚执行端,抬压脚凸轮具有空转面和压脚抬升面,空转面用来在驱动电机驱动送布牙零针距定位机构时避开动力传到抬压脚顶杆,剪线曲柄具有推动件,推动件设置在剪线曲柄的末端偏心位置,剪线叉轮具有剪线回位杆和剪线推动杆,推动件设置在剪线回位杆和剪线推动杆之间用来在驱动电机驱动送布牙零针距定位机构时避开动力传到剪线回位杆或剪线推动杆,剪线回位杆上设置有输出轴避让部。
13.优选地,所述剪线叉轮还和轴杆匹配,剪线叉轮在轴杆上轴向随推动件而转动。
14.本技术通过驱动电机连接的输出轴安装有运行轮,运行轮固定有曲柄,曲柄铰接第一连杆,第一连杆铰接第二连杆,第二连杆铰接第三连杆,第三连杆铰接送布曲柄,送布曲柄固定在送布轴上;在靠近送布牙一侧送布轴上安装有送布牙座,送布牙座上匹配铰接有送布牙架,送布牙架上固定安装有送布牙。本技术缝纫机的输出轴与曲柄之间没有设置摆动座,在制造上起到降低缝纫机成本的作用,在使用维护上大幅降低了对润滑系统的高度依赖,达到免维护无需润滑的技术效果,而且,还具有一台缝纫机拥有多种针距调节的功能,克服了现有缝纫机一般只具有一种缝制针距的技术缺陷;在送布牙零针距定位机构中,通过驱动电机驱动输出轴上的运行轮,间接使得送布牙的牙尖处在针板上平面之下的送布牙零针距位置,克服了现有缝纫机送布牙的牙尖高出针板上平面对缝料带来的不利影响,确定送布牙零针距定位机构的送布牙零针距定位,使得缝纫机具有稳定可靠的缝制工艺,提高了缝制品质。
附图说明
15.图1是本技术一种不具有摆动座的缝纫机的构造示意图;
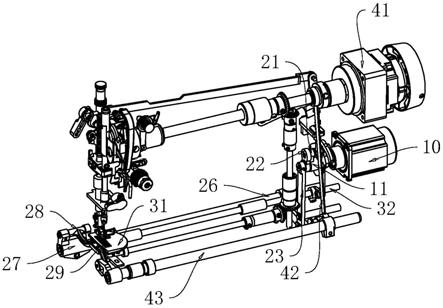
16.图2是本技术一种不具有摆动座的缝纫机驱动机构示意图;
17.图3是本技术一种不具有摆动座的缝纫机的第一连杆和第二连杆等构造图;
18.图4是本技术一种不具有摆动座的缝纫机的第二连杆和第三连杆等连接构造图;
19.图5是本技术一种不具有摆动座的缝纫机的剪线抬压脚机构结构图;
20.图6是本技术一种不具有摆动座的缝纫机的抬压脚凸轮和剪线曲柄结构图。
21.附图标记:驱动电机10,运行轮11,轴孔111,输出轴12,曲柄21,第一连杆22,第二连杆23,通孔231,第三连杆24,送布曲柄25,送布轴26,送布牙座27,送布牙架28,送布牙29,针板上平面31,固定轴32,主轴电机41,抬牙连杆42,抬压轴43,抬压脚凸轮51,空转面511,压脚抬升面512,抬压脚顶杆52,抬压脚执行端53,剪线曲柄61,推动件611,剪线叉轮71,剪线回位杆711,剪线推动杆712,剪线执行端713,输出轴避让部714,轴杆81。
具体实施方式
22.下面结合附图1-6对本技术的优选实施例进行详细阐述,以使本技术的优点和特
征能更易于被本领域技术人员理解,从而对本技术的保护范围做出更为清楚明确的界定,这些实施方式仅用于说明本发明,而并非对本发明的限制。
23.结合附图,本技术一种不具有摆动座的缝纫机具有送布驱动机构、针距调节机构、送布牙零针距定位机构、剪线抬压脚机构和控制系统等,本技术的缝纫机除了不具有传统针距调节需要的摆动座外,还具有能够实现正常缝制工作的所有功能。
24.本技术一种不具有摆动座的缝纫机具有驱动电机10、运行轮11、曲柄21、第一连杆22、第二连杆23、第三连杆24、送布曲柄25、送布轴26、送布牙座27、送布牙架28以及送布牙29等零件。在本技术的送布驱动机构中,通过控制系统控制驱动电机10以来回摆运转方式输出摆动源,驱动电机10的输出轴12固定连接并驱动运行轮11,运行轮11固定有曲柄21,曲柄21铰接第一连杆22,第一连杆22铰接第二连杆23,第二连杆23铰接第三连杆24,第三连杆24铰接送布曲柄25,送布曲柄25固定在送布轴26上;在靠近送布牙29一侧送布轴26上安装有送布牙座27,送布牙座27上匹配铰接有送布牙架28,送布牙架28上固定安装有送布牙29,运行轮11将摆动源通过上述的零部件间接传递给送布牙29,使得送布牙29具有缝纫工作的前后送布动作,在此,驱动电机10的输出轴12与送布曲柄25之间没有摆动座。
25.本技术取消了现有缝纫机针距调节所需要的摆动座技术方案,在制造上起到降低缝纫机成本的作用,在使用维护上大幅降低了对润滑系统的高度依赖,达到免维护无需润滑的技术效果,除了上述驱动电机10驱动运行轮11、第一连杆22、第二连杆23和第三连杆24等实现送布驱动机构的前后送布动作外,本技术的控制系统通过控制驱动电机10来实现针距调节机构的针距调节和送布牙零针距定位机构的送布牙零针距定位,提高了缝纫机的智能控制水平。
26.在送布驱动机构中,运行轮11具有轴孔111,驱动电机10连接的输出轴12穿设在轴孔111内部,运行轮11固定在输出轴12上。运行轮11上设置有可以固定曲柄21的连接部,以方便曲柄21连接,本实施例中驱动电机10连接的输出轴12上只安装有运行轮11,在驱动电机10驱动下运行轮11执行送布驱动机构、针距调节机构、送布牙零针距定位机构的相关缝纫动作。驱动电机10连接的输出轴12上除了只安装运行轮11外,还可以选择性地加装抬压脚凸轮51和/或剪线曲柄61,就是说在运行轮11与驱动电机10之间安装的运行轮11还选择性加装有抬压脚凸轮51和剪线曲柄61、或加装抬压脚凸轮51,或加装剪线曲柄61,一共是四种安装方式。
27.驱动电机10驱动运行轮11,连接在运行轮11的曲柄21带动第一连杆22摆动,第一连杆22再将摆动动作通过第二连杆23、第三连杆24、送布曲柄25、送布轴26、送布牙座27、送布牙架28,传递到送布牙架28上固定安装的送布牙29上,使得送布牙29产生左右摆动的动作,驱动电机10间接对送布驱动机构中的送布牙29提供了前后送布动力。在本技术缝纫机主轴电机41的驱动下,通过抬牙连杆42及抬压轴43间接对送布牙29产生上下送布动作,送布牙29的前后送布动作和送布牙29的上下送布动作相互结合在一起,即两个动作融合在送布牙29上,实现了缝纫机缝制所需要送布动作的产生,送布牙29可以正常送布缝制了。
28.针距调节机构是执行针距调节的,在控制系统控制下,驱动电机10驱动输出轴12及运行轮11使得曲柄21左右摆动的角度发生改变,曲柄21摆动角度越大则针距越大,曲柄21摆动角度越小则针距越小,因此,针距的大小完全依靠控制系统控制下驱动电机10来实现的,本技术的针距调节方案可以实现一台缝纫机拥有多种针距调节的功能,克服了现有
缝纫机一般只具有一种缝制针距的技术缺陷。
29.上述的第二连杆23上设置有通孔231,固定轴32穿设在通孔231内部,第二连杆23的上部在曲柄21及第一连杆22的摆动作用下,使得第二连杆23以固定轴32为支撑轴摆动第二连杆23的下部,第二连杆23以其下部的摆动促使与之铰接的第三连杆24产生摆动动作,直至传到送布曲柄25及送布轴26。固定轴32固定在缝纫机上。
30.在送布牙零针距定位机构中,当需要定位送布牙零针距位置,在控制系统控制下驱动电机10驱动输出轴12上的运行轮11,曲柄21通过第一连杆22、第二连杆23和第三连杆24将送布曲柄25推到处于最低位置状态(最低位置是指送布曲柄25摆动时处在瞬间较低的位置),再通过送布曲柄25、送布轴26、送布牙座27、送布牙架28以及送布牙29,送布牙29的牙尖处在针板上平面31之下的送布牙零针距位置,以克服现有缝纫机送布牙的牙尖高出针板上平面对缝料带来的不利影响,确定送布牙零针距定位机构的送布牙零针距定位,使得缝纫机具有稳定可靠的缝制工艺,提高了缝制品质。
31.在驱动电机10连接的输出轴12上只安装运行轮11的方案中,本技术缝纫机的剪线抬压脚机构具有剪线组件和抬压脚组件,由剪线组件执行剪线动作由抬压脚组件执行抬压脚动作。具体的,剪线组件安装在缝纫机基板下,在控制系统的控制下剪线组件启动剪线电磁铁执行剪线动作,在剪线完成后,由安装在缝纫机机头上的抬压脚电磁铁启动执行抬压脚动作,上述的剪线组件和抬压脚组件保证了缝纫机结束缝纫工作的顺利完成,具备了缝纫机所有的缝制功能。
32.在固定有运行轮11的输出轴12上还安装有抬压脚凸轮51和/或剪线曲柄61的方案中。剪线曲柄61安装在输出轴12靠近驱动电机10一侧,抬压脚凸轮51位于运行轮11与剪线曲柄61之间。上述剪线组件具有剪线曲柄61、剪线叉轮71和剪线执行端713等,抬压脚组件具有抬压脚凸轮51、抬压脚顶杆52、抬压脚执行端53等。抬压脚凸轮51具有空转面511和压脚抬升面512,空转面511用来在驱动电机10驱动送布牙零针距定位机构时避开动力传到抬压脚顶杆52,压脚抬升面512用于抬升或者下放抬压脚顶杆52。剪线曲柄61具有推动件611,推动件611设置在剪线曲柄61的末端偏心位置。推动件611推动剪线叉轮71实现剪线动作,剪线叉轮71具有剪线回位杆711和剪线推动杆712,推动件611设置在剪线回位杆711和剪线推动杆712之间用来在驱动电机10驱动送布牙零针距定位机构时避开动力传到剪线回位杆711或剪线推动杆712。
33.在驱动电机10从来回摆运转位置离开,以旋转方式先驱动剪线组件,在剪线组件完成剪线后在执行抬压脚组件的抬压脚动作。驱动电机10驱动推动件611下压剪线推动杆712使得剪线执行端713完成剪线动作,驱动电机10继续旋转脱离推动件611,此时,驱动电机10驱动抬压脚凸轮51由原先处在空转面511状态向压脚抬升面512方向旋转,使得压脚抬升面512作用在抬压脚顶杆52,由抬压脚执行端53执行使抬压脚顶杆52抵靠在压脚抬升面512的抬压脚最高点,最高点为抬压脚顶杆52抬压脚的最高状态,完成抬升抬压脚动作。驱动电机10继续旋转推动剪线回位杆711,使得推动件611作用到剪线回位杆711上直至回到原来位置,此时,抬压脚凸轮51在预设的时间内停留后,在驱动电机10继续旋转下抬压脚凸轮51从抬压脚最高点旋转回到空转面511,实现下放抬压脚动作。驱动电机10旋转一周完成剪线和抬压脚动作后,驱动电机10回到来回摆运转位置上。
34.另外,剪线叉轮71还和轴杆81匹配,剪线叉轮71在轴杆81上可以轴向随推动件611
而转动,利于剪线叉轮71执行剪线动作。
35.另外,剪线叉轮71的剪线回位杆711上设置有输出轴避让部714,输出轴避让部714位于靠近推动件611一侧,剪线回位杆711用于剪线叉轮71在驱动电机10驱动旋转下避让输出轴12之用,使得推动件611避免撞击剪线回位杆711。
36.上述的抬压脚还存在另外的一种情景,驱动电机10驱动抬压脚凸轮51从空转面511旋转使得压脚抬升面512作用在抬压脚顶杆52完成抬压脚动作,完成抬压脚动作后抬压脚凸轮51从原路返回,这里不剪线只抬压脚的缝纫动作适用于缝纫线迹的拐弯。
37.以上所述仅为本技术的优选实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1