一种横机的起底装置的制作方法
1.本实用新型属于横机技术领域,特别涉及一种横机的起底装置。
背景技术:
2.电脑针织横编机是针织机行业中技术含量很高的自动化机械,它融合了计算机数字控制、电子驱动、机械设计等技术为一体。电脑针织横编机在工作过程中对已编织的织片必须有牵拉才能完成后续的编织,即只有在牵拉状态下才能顺利地对织片进行编织。在横机的使用过程中,每个花色或者颜色的纱线编织完成后,需要进行夹剪;在织物编织完成后也需要进行夹剪,现有的横机的夹剪装置一般是设置在针板端部,其位于罗拉和起底板的上方。
3.例如,中国国家知识产权局授权的一种电脑编织横机的夹线装置【申请号2006201060725;公开公告号cn201040798y】,公开了夹线装置包括控制器、夹子、剪刀、驱动电机,一把剪刀、三把夹子依次间隔排列于针板一侧,剪刀、夹子分别由步进电机驱动,夹子呈阶梯式排列。以及一种夹剪装置【申请号2009201918320;公告号cn201485608u】,包括夹剪装置中的两套夹子、剪刀呈左右对称分布于针板两侧,每套夹子拥有一把剪刀及二把夹子,剪刀、夹子分别与小气缸连接且有小气缸控制其张开或闭合,夹子分别于大气缸控制其升降,小气缸和大气缸分别通过气管连接到换气阀,控制系统通过对换气阀的控制来控制小气缸及大气缸的动作。
4.上述的方案均存在以下问题:1、每完成一件织物,需要重新起头,将纱线重新穿引至罗拉下方,再进行起底;2、针对多花色的织物,每个颜色的纱线在编织完成后,都需要机头将对应纱嘴送到横机机身两端的夹剪装置上,利夹剪装置将对应纱线夹住并且剪断,然后机头重新编织新的花色,这样就导致横机机身两端需要设置数量众多的夹线其和剪刀,增加了系统控制的难度,难以做到高精度的夹持和剪线,当夹持或剪线出现问题时,容易导致纱线回弹引起横机报警;3、还使得横机机身两端狭小空间更为拥挤,不便于布置、维修;4、每次机头将完成编织的纱嘴送到夹剪装置处进行夹剪都需要浪费一定的时间,这样导致横机编织过程不够连续,编织的效率降低,甚至影响编织效果。
技术实现要素:
5.有鉴于此,本实用新型的目的在于提供一种横机的起底装置,目的是解决上述背景技术中提出的问题。
6.本实用新型的目的可通过下列技术方案来实现:一种横机的起底装置,包括机架和设置在机架上的罗拉、起底板、升降机构,所述罗拉设置于机架顶部且位于起底板的正上方,所述升降机构与起底板连接并驱动起底板升降,其特征在于,还包括导向机构和夹剪机构,所述导向机构包括转轴和导向板,所述导向机构和所述起底板之间设有第一联动组件,所述第一联动组件能够使所述导向板的上端随起底板下降而靠向起底板并且在起底板降到最低处时使导向板顶部位于起底板的上方;所述夹剪机构设置在罗拉下部且位于导向机
构后上方,所述夹剪机构包括导轨、驱动器、传动组件、剪刀和收线器,所述驱动器和剪刀均安装在导轨左端,所述收线器滑动连接在导轨上且位于剪刀的右侧,所述收线器通过传动组件和驱动器连接,所述驱动器驱动所述收线器在导轨上左右滑动,所述剪刀和所述收线器之间设有第二联动组件,所述第二联动组件能够使所述剪刀在收线器将纱线推送到剪刀口后进行夹剪。
7.在上述的横机的起底装置中,所述第一联动组件包括设置在转轴一端并与转轴固连的摆杆和设置在起底板下方的顶杆,所述摆杆一端朝向顶杆并位于顶杆的运动路径上。当顶杆随起底板下移时推动摆杆,使摆杆向下摆动,从而带动导向板向起底板方向转动,最终使导向板的顶部位于起底板的上方。
8.在上述的横机的起底装置中,所述顶杆的下端朝向摆杆的一侧设有导向斜面。通过设置导向斜面,能够方便顶杆驱动摆杆转动,是两者之间的配合更顺滑,避免出现卡顿。
9.在上述的横机的起底装置中,所述第二联动组件包括设置在剪刀上的摆臂和设置在所述收线器上的凸柱,所述摆臂呈y状,所述凸柱设置在收线器靠近剪刀一侧,所述凸柱在收线器向剪刀移动时卡入摆臂并推动摆臂摆动。
10.在上述的横机的起底装置中,所述剪刀包括剪刀座、传动齿轮、齿条、两个剪刀片、两个连杆,所述剪刀座固连或者可拆卸连接在导轨上,每个剪刀片分别连接一个连杆,两个连杆铰接在剪刀座上,两个剪刀片的中部通过一连轴铰接,所述连轴固定在所述齿条上,所述传动齿轮设置在剪刀座上且和所述摆臂同轴连接,所述齿条和传动齿轮啮合,所述剪刀座上位于剪刀片上方处还设有纱线夹,所述纱线夹开口朝向收线器。
11.在上述的横机的起底装置中,所述收线器还包括底座、上收线爪和下收线爪,所述上收线爪和下收线爪平行设置在底座上,上收线爪和下收线爪均呈v状,且上收线爪和下收线爪的开口均朝向剪刀,所述上收线爪与所述纱线夹位置相对,所述下收线爪的位置对应于剪刀片下方,所述凸柱设置在底座朝向剪刀座一侧且与摆臂位置对应,所述底座和所述传动组件联接。在收线器滑向到剪刀时,上收线爪和下收线爪同步将纱线拉向剪刀,位于上收线爪和下收线爪之间的纱线处于竖直状态,从而便于纱线进入两片剪刀片构成的剪刀口;当收线器滑动到剪刀处并与剪刀联动时,上收线爪刚好能够带着纱线卡入纱线夹,纱线被上收线爪和纱线夹联合卡住,从而实现稳定夹线。
12.在上述的横机的起底装置中,所述夹剪机构还包括第一传感器、第一触点、第二传感器和第二触点,所述第一传感器可拆卸安装或者固定安装在滑轨右侧,所述第二传感器安装在剪刀座上,所述第一触点安装在底座的右端且与所述第一传感器的位置相对,所述第二触点安装在底座的左端且与第二传感器的位置相对。
13.在上述的横机的起底装置中,所述驱动器为伺服电机,所述传动组件包括主动齿轮、从动齿轮以及同步带,所述主动齿轮和从动齿轮分别设置在导轨两端,所述同步带与分别所述主动齿轮、从动齿轮啮合,所述主动齿轮和所述伺服电机连接,所述底座和所述同步带固定连接。
14.在上述的横机的起底装置中,所述驱动器为伺服电机,所述传动组件包括减速器和与减速器配合的双向螺杆,所述双向螺杆和所述导轨同向设置,所述双向螺杆通过减速器和所述伺服电机连接,所述底座套设在所述双向螺杆上,且所述底座上设有与所述双向螺杆配合的螺纹。
15.在上述的横机的起底装置中,所述导向板的上部具有相对导向板向后侧弯折的弯折部。通过设置弯折部,使得导向板在起底板下降后能够更容易的将织物引导到导向板上,并且进一步使织物向前倾斜,一方面方便织物在卸片时顺利脱离起底板,另一方面也方便织物的纱线被收线器的收线爪抓住,便于纱线的夹剪。
16.与现有技术相比,本横机的起底装置具有以下优点:1、取消了现有的多个夹线机构和剪刀组合夹剪的结构,降低了系统的控制难度和各机构布置难度;2、将多组夹剪控制缩减为单一的夹剪配合,简化了结构的同时提高了夹剪稳定性和可靠性;3、编织过程利用罗拉同步带动编织完成的某些颜色的纱线以及正在编织的织物,利用罗拉和织物拉住编制完成的某些颜色的纱线,杜绝纱线回弹导致横机报警停机的现象发生;4、避免了横机在编织过程中将某些色彩纱嘴运送到横机针板一端进行单独夹线、剪线的过程,减少了编织过程的停顿,有效节约了单件织物的编织时间,从而大幅提高编织效率。
附图说明
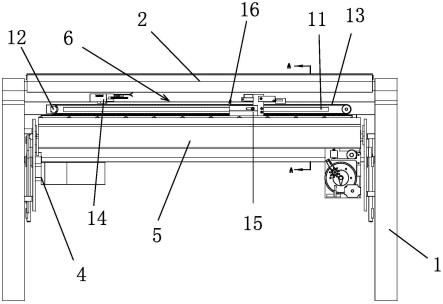
17.图1是实施例一横机的起底装置的前视视角的结构图。
18.图2是图1的a-a剖视图。
19.图3是图2的b处放大图。
20.图4是实施例一横机的起底装置后视视角的结构立体图。
21.图5是实施例一收线器未收线的状态示意图。
22.图6是实施例一收线器和剪刀配合联动夹剪纱线的示意图。
23.图中,1、机架;2、罗拉;3、起底板;4、升降机构;5、导向机构;6、夹剪机构;7、转轴;8、导向板;9、弯折部;10、第一联动组件;11、导轨;12、驱动器;13、传动组件;14、剪刀;15、收线器;16、第二联动组件;17、摆杆;18、顶杆;19、导向斜面;20、摆臂;21、凸柱;22、剪刀座;23、传动齿轮;24、齿条;25、剪刀片;26、连杆;27、连轴;28、纱线夹;29、底座;30、上收线爪;31、下收线爪;32、主动齿轮;33、从动齿轮;34、同步带;35、第一传感器;36、第一触点;37、第二传感器;38、第二触点。
具体实施方式
24.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
25.如图1-图2所示,本横机的起底装置包括机架1和设置在机架1上的罗拉2、起底板3、升降机构4,罗拉2设置于机架1顶部且位于起底板3的正上方,升降机构4与起底板3连接并驱动起底板3升降,还包括导向机构5和夹剪机构6,导向机构5包括转轴7和导向板8,导向板8的上部具有相对导向板8向后侧弯折的弯折部9。导向机构5和起底板3之间设有第一联动组件10,第一联动组件10能够使导向板8的上端随起底板3下降而靠向起底板3并且在起底板3降到最低处时使导向板8顶部位于起底板3的上方。夹剪机构6设置在罗拉2下部且位于导向机构5后上方,夹剪机构6包括导轨11、驱动器12、传动组件13、剪刀14和收线器15,驱动器12和剪刀14均安装在导轨11左端,收线器15滑动连接在导轨11上且位于剪刀14的右侧,收线器15通过传动组件13和驱动器12连接,驱动器12驱动收线器15在导轨11上左右滑动,剪刀14和收线器15之间设有第二联动组件16,第二联动组件16能够使剪刀14在收线器
15将纱线推送到剪刀14口后进行夹剪。
26.具体的说,结合3、4所示,第一联动组件10包括设置在转轴7一端并与转轴7固连的摆杆17和设置在起底板3下方的顶杆18,摆杆17一端朝向顶杆18并位于顶杆18的运动路径上,顶杆18的下端朝向摆杆17的一侧设有导向斜面19。当顶杆18随起底板3下移时推动摆杆17,使摆杆17向下摆动,从而带动导向板8向起底板3方向转动,最终使导向板8的顶部位于起底板3的上方。通过第一联动组件10实现了导向板8和起底板3的联动,使得导向板8在起底板3下降后能够更容易的将织物引导到导向板8上,并且进一步使织物向前倾斜,一方面方便织物在卸片时顺利脱离起底板3,另一方面也方便织物的纱线被收线器15的收线爪抓住,便于纱线的夹剪。
27.如图5-图6所示,第二联动组件16包括设置在剪刀14上的摆臂20和设置在收线器15上的凸柱21,摆臂20呈y状,凸柱21设置在收线器15靠近剪刀14一侧,凸柱21在收线器15向剪刀14移动时卡入摆臂20并推动摆臂20摆动。通过设置第二联动组件16,实现了收线、夹线和剪线的联动,同时减少了控制器和驱动器12,有助于提高系统控制稳定性和可靠性。
28.剪刀14包括剪刀座22、传动齿轮23、齿条24、两个剪刀片25、两个连杆26,剪刀座22固连或者可拆卸连接在导轨11上,每个剪刀片25分别连接一个连杆26,两个连杆26铰接在剪刀座22上,两个剪刀片25的中部通过一连轴27铰接,连轴27固定在齿条24上,传动齿轮23设置在剪刀座22上且和摆臂20同轴连接,齿条24和传动齿轮23啮合,剪刀座22上位于剪刀片25上方处还设有纱线夹28,纱线夹28开口朝向收线器15。
29.收线器15还包括底座29、上收线爪30和下收线爪31,上收线爪30和下收线爪31平行设置在底座29上,上收线爪30和下收线爪31均呈v状,且上收线爪30和下收线爪31的开口均朝向剪刀14,上收线爪30与纱线夹28位置相对,下收线爪31的位置对应于剪刀片25下方,凸柱21设置在底座29朝向剪刀座22一侧且与摆臂20位置对应,底座29和传动组件13联接。
30.驱动器12为伺服电机,传动组件13包括主动齿轮32、从动齿轮33以及同步带34,主动齿轮32和从动齿轮33分别设置在导轨11两端,同步带34与分别主动齿轮32、从动齿轮33啮合,主动齿轮32和伺服电机连接,底座29和同步带34固定连接。
31.夹剪机构6还包括第一传感器35、第一触点36、第二传感器37和第二触点38,第一传感器35可拆卸安装或者固定安装在滑轨右侧,第二传感器37安装在剪刀座22上,第一触点36安装在底座29的右端且与第一传感器35的位置相对,第二触点38安装在底座29的左端且与第二传感器37的位置相对。在收线器15滑向到剪刀14时,上收线爪30和下收线爪31同步将纱线拉向剪刀14,位于上收线爪30和下收线爪31之间的纱线处于竖直状态,从而便于纱线进入两片剪刀片25构成的剪刀14口;当收线器15滑动到剪刀14处,第二传感器37和第二触点38接触时,上收线爪30刚好能够带着纱线卡入纱线夹28,纱线被上收线爪30和纱线夹28联合卡住,从而实现稳定夹线;同时剪刀14上的摆臂20被收线器15上的凸柱21推动而旋转,带动传动齿轮23转动,使齿条24向右移动,带动剪刀片25剪线,通过剪刀14、第二联动组件16和收线器15的配合,实现了由单个驱动电机控制精确控制收线、夹线和剪线的同步操作,控制难度低,控制更加精确。
32.实施例二:
33.本实施例和实施例一大致相同,不同之处在于:驱动器12为伺服电机,传动组件13包括减速器和与减速器配合的双向螺杆,双向螺杆和导轨11同向设置,双向螺杆通过减速
器和伺服电机连接,底座29套设在双向螺杆上,且底座29上设有与双向螺杆配合的螺纹。本实施例采用了减速器和双向螺杆代替主动齿轮32、从动齿轮33和同步带34,实现对收线器15的移动控制。
34.本发明的工作原理如下:
35.首先将纱线穿过罗拉2,下拉后固定在夹剪机构6上,然后横机的机头先用纱线织半个来回,形成一行在水平面上呈连续排列的线圈,机头停止。起底板3在升降机构4的驱动作用下从初始位置经过两个卷布罗拉2之间的缝隙开始上升,上升至超过针板3-4mm后,起底板3对编制的线圈进行封锁固定,然后起底板3在升降机构4的驱动作用下开始下降,收紧机头编织出的第一行线圈,此时第一行线圈被起底板3固定并下拉。
36.随后横机的机头开始来回地用纱线进行编织,同时,起底板3在升降机构4的驱动作用下开始下降,起底板3下降的速度与机头的编织速度同步,使织物一直受到起底板3的牵拉力,因此,机头能够对织片进行正常的编织。
37.起底板3对织物进行向下的牵拉,当起底板3下降至经过两个罗拉2之间的缝隙时,织物被两个反向转动的罗拉2捕取,当织物被罗拉2捕取后,起底板3松开对织物的封锁固定。升降机构4继续带动起底板3下降,直至下降到初始位置,升降机构4停止。在起底板3下降过程中,导向板8因第一联动组件10的作用而随起底板3动作,导向板8的上端最终翻转覆盖在起底板3上方。织物随着罗拉2的卷收继续下降,当织物降到一定位置后,被导向板8引导朝向起底板3前侧倾斜。当织物编织结束后,罗拉2继续卷收,使织物保持下降,当织物的最上端下降并越过夹剪机构6时,夹剪机构6的收线器15在驱动器12的驱动下由右端向左端移动,其收线爪将纱线全部收拢并随着收线器15运送至剪刀14的纱线夹28处,随着收线器15进一步向剪刀14运动,收线器15上的凸柱21卡入剪刀14的摆臂20,并推动摆臂20转动,通过传动齿轮23和齿条24的传动带动两片剪刀片25将纱线剪断,使织物和纱线分离,而纱线继续被纱线夹28和收线爪联合夹持。
38.需要说明的是,在织物的连续编织过程中,横机的机头无需将编制完成的不同色彩的纱嘴一一运送到机头一端进行夹剪;某一颜色的纱嘴编织完成后停在原位,然后继续放线,其他颜色纱嘴可以继续编织,无需停顿,以及编织结束的该色彩的纱线随着织物由罗拉2同步带34动下拉,因此纱线即使不进行夹剪也不会回弹,从而不会引起横机报警。另外在本实施例中,织物位置的检测、起底板升降是否到位等位置检测均采用传感器实现,这个技术属于现有技术,因此不做赘述。
39.当需要进行下一件织物编织时,罗拉2重新打开,起底板3上升,机头重新编织织物的第一行线圈,并由起底板3固定第一行线圈,然后收线器15在驱动器12作用下复位,第一传感器35和第一触点36接触,纱线被松开,机头进行新一轮编织。
40.本实用新型的起底装置通过在样机上多次重复试验,取得良好的使用效果和使用体验,通过其在横机样机上的应用,省略了现有技术中每编织完一个颜色纱线都需要机头将对应沙嘴运送到横机一端进行夹线和剪线的步骤,改为在织物编织结束后,各色纱线进行统一夹剪,这样不许对单色纱线进行单独夹剪、节省了时间,同时也简化了夹剪装置的结构复杂程度,有利于降低系统控制难度,以及提高系统的控制准确和可靠性。
41.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似
的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1