袜子输送器及一体织缝翻织袜机的制作方法
1.本发明涉及袜机技术领域,更具体地说,它涉及一体织缝翻织袜机的袜子输送器,还涉及一种一体织缝翻织袜机。
背景技术:
2.目前,市面上较为领先的袜机,通常采用织袜、翻袜和缝袜一体式的结构,可装置设备联合组装,形成袜子的自动化生产。首先,由织袜装置将原材料编织形成管状的袜筒;而后通过袜机上的拾取组件,将织袜机编织的袜筒移送至翻袜装置,负压将袜筒吸入翻袜筒内,翻袜升降筒从翻袜筒内部伸出,对袜筒进行翻面;而后由缝袜组件对袜子进行缝合加工,得到完整的袜子。
3.该种袜机能够普遍适用于较短袜子的生产,但是对于长袜而言,尤其是超过拾取组件的拾取行程(一般为50cm),却存在较大问题。长袜在从织袜装置将移送至翻袜装置时,长袜的末端无法完全从织袜装置当中移除,很难顺利送入翻袜装置当中,导致袜机无法继续生产,影响生产效率。
4.现有技术中,公开号cn110144672a的中国发明专利申请公开了一种缝袜机,包括上部组件、下部组件、缝合组件、拾取组件,上部组件和下部组件分别设置于缝合组件的上下两端,拾取组件设置于缝合组件的侧部,下部组件包括吸袜筒和套合于吸袜筒内部的翻袜升降筒;翻袜升降筒与负压气源连接,并能够在竖直轴向上向上部组件的方向伸出;吸袜筒的外侧设置有用于带动下部组件沿倾斜方向往复移动的下部组件移动装置。该方案通过将吸袜筒设置为活动式的结构,能够在倾斜方向的行程内往复移动,增大了吸袜筒与拾取组件之间的距离,以提高对长袜的适用性。但是,吸袜筒的行程距离有限,对于超过该一定长度的袜子仍旧无法适用,无法避免上述问题;而且其结构复杂,需要大幅改变传统一体式袜机的结构,难以适用于传统一体式袜机的技术改良。
5.因此需要提出一种新的方案来解决这个问题。
技术实现要素:
6.本发明的目的在于解决上述问题,提供一种一体织缝翻织袜机的袜子输送器,能够在织袜机和缝袜机之间对袜子进行辅助输送,能够提高袜子的移送顺畅性,提高了袜机的工作稳定性。
7.本发明的上述技术目的是通过以下技术方案得以实现的:一体织缝翻织袜机的袜子输送器,所述一体织缝翻织袜机包括织袜机、缝袜机以及拾取组件,拾取组件可将缝袜机的针筒组件中的袜子一端拾取至缝袜机的缝齿盘,缝齿盘和针筒组件之间形成送袜路径;
8.所述袜子输送器安装于织袜机和缝袜机之间,包括通过支架支撑的移动组件、夹持组件和驱动组件,所述夹持组件通过移动组件驱动,可在相对送袜路径的靠近位置和远离位置之间活动;所述夹持组件用于在靠近位置夹持送袜路径处的袜子;所述驱动组件与夹持组件联动,用于驱动夹持组件运动将被夹持的袜子从织袜机移出。
9.本发明进一步设置为,所述夹持组件包括夹持座、夹持件以及动力件,夹持座安装于移动组件上;夹持件的一端通过夹持座支撑,另一端设可开闭的夹口,并受动力件驱动可作夹持动作;所述夹持组件在靠近位置时,所述夹口位于送袜路径处。
10.本发明进一步设置为,所述夹持件包括夹持件一和夹持件二,夹持件一通过夹持座支撑;夹持件二通过活动块活动安装于夹持座,并相对夹持件一具有一定的活动行程;所述夹持件一和夹持件二之间形成所述夹口。
11.本发明进一步设置为,所述活动块滑动或转动连接于夹持座;所述动力件包括气缸一,所述气缸一用于驱动活动块相对夹持件一移动。
12.本发明进一步设置为,所述气缸一为往复式气缸。
13.本发明进一步设置为,所述动力件还包括弹性件一,所述弹性件一连接于活动块与夹持座之间,用于在夹持件二的活动行程内弹性驱动活动块靠近夹持件一;所述气缸用于在工作时驱动活动块向远离夹持件一方向移动。
14.本发明进一步设置为,所述夹持件一和夹持件二分别转动连接于夹持座和活动块上,所述驱动组件包括旋转驱动器,所述旋转驱动器的输出端用于驱动夹持件一转动。
15.本发明进一步设置为,所述夹持件一和夹持件二上分别设置相互适配的夹持部,所述夹持部均为旋转体状,用于夹持夹口内的袜子。
16.本发明进一步设置为,所述夹持件一和夹持件二的夹持部形状相同或不同。
17.本发明进一步设置为,所述夹持件一和夹持件二远离夹持座的一端均呈锥状或球头状。
18.本发明进一步设置为,所述夹持件一和夹持件二的外周均设置防滑纹路。
19.本发明进一步设置为,所述夹持件一和夹持件二的外周均设置防滑层,所述防滑层为防滑涂层或防滑套。
20.本发明进一步设置为,所述移动组件包括升降机构和横移机构;
21.所述升降机构用于带动夹持组件在竖直方向升降,所述横移机构用于带动所述升降机构和夹持组件一起在横向方向移动;或,所述横移机构用于带动所述夹持组件在横向方向移动,所述升降机构用于带动横移机构和夹持组件一起在竖直方向升降。
22.本发明进一步设置为,所述移动组件包括摆动杆和摆动驱动器,所述摆动杆转动连接在所述支架上,夹持组件安装于摆动杆;所述摆动驱动器的输出端与摆动杆连接,用于驱动摆动杆往复摆动,以带动夹持组件在相对送袜路径的靠近位置和远离位置之间活动。
23.本发明还提供一体织缝翻织袜机,包括织袜机和缝袜机,所述缝袜机包括吸袜筒和拾取组件,所述拾取组件可将缝袜机的针筒组件中的袜子一端拾取至缝袜机的缝齿盘,缝齿盘和针筒组件之间形成送袜路径;还包括上述袜子输送器。
24.综上所述,本发明具有以下有益效果:
25.通过在袜子输送器,能够在织袜机和缝袜机之间对袜子进行辅助输送,通过夹持组件和驱动组件的配合,能够将袜子夹持,驱动组件驱动夹持组件运动,形成例如移动拉扯、卷绕、辊筒输送等方式,能够将袜子完全从织袜机当中拉出,使得袜子能够朝向吸袜筒的方向下垂,袜子能够更加接近吸袜筒,以便吸袜筒能够顺畅将袜子吸入,提高袜机的工作效率。
附图说明
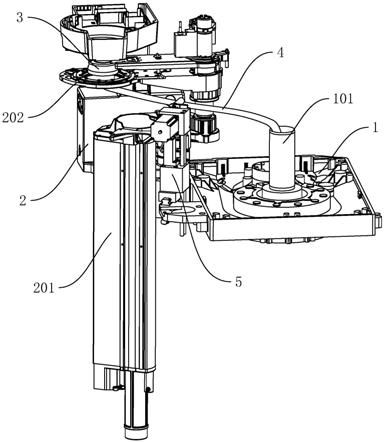
26.图1为本发明一体织缝翻织袜机的结构示意图;
27.图2为实施例一中袜子输送器的结构示意图一;
28.图3为实施例一中袜子输送器的结构示意图二;
29.图4为实施例一中夹持组件和驱动组件的结构示意图;
30.图5为实施例二中袜子输送器的第一种结构示意图;
31.图6为实施例二中袜子输送器的第二种结构示意图;
32.图7为实施例三中袜子输送器的第一种结构示意图,以表示驱动组件处于起点位置;
33.图8为实施例三中袜子输送器的第一种结构示意图,以表示驱动组件处于终点位置;
34.图9为实施例三中袜子输送器的第二件结构示意图;
35.图10为实施例四中袜子输送器的结构示意图。
36.附图标记:1、织袜机;101、针筒组件;2、缝袜机;201、吸袜筒;202、缝齿盘;3、拾取组件;4、送袜路径;5、袜子输送器;6、支架;7、夹持组件; 71、夹持座;711、滑槽;712、盖板;72、夹持件;721、夹持件一;722、夹持件二;723、夹持部;724、悬空端;73、夹口;74、活动块;741、横端;742、竖端;743、活动架;75、动力件;751、气缸一;752、弹性件一;771、缺口; 8、驱动组件;81、驱动电机;811、轴承;82、驱动座;83、导向件;84、驱动机构;85、驱动块;86、转轴;9、移动组件;91、横移机构;911、横移支撑件;912、横移件;913、导滑件一;914、气缸二;915、弹性件二;92、升降机构;921、升降支撑件;922、升降件;923、导滑件二;924、气缸三;93、摆动杆;94、摆动电机;95、挡块;96、弹性件三。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.实施例一
39.本实施例公开一种织袜机的往复式袜子输送器,如图1所示,该袜子输送器5安装在一体织缝翻织袜机上,配合袜机生产工作;
40.该一体织缝翻织袜机,包括织袜机1、缝袜机2以及拾取组件3等部件,袜机的其他结构在此不做赘述;其中拾取组件3可在织袜机1和缝袜机2之间往复运动,将缝袜机2的针筒组件101中的袜子一端拾取,并移送至缝袜机2的缝齿盘202,被拾取后的袜子在织袜机1的针筒组件101和缝袜机2的缝齿盘 202之间形成送袜路径4,袜子在送袜路径4的位置处袜子两端方向能够得到支撑,形成接近直线的路径。
41.袜子输送器5安装于织袜机1和缝袜机2之间,对应于送袜路径4的一侧,具体包括通过支架6支撑的移动组件9、夹持组件7和驱动组件8,成一整体安装在袜机的机架上。其中,夹持组件7通过移动组件9驱动,可在相对送袜路径4的靠近位置和远离位置之间活动,在靠近位置时,夹持组件7的部件与送袜路径4相对接近,夹持组件7可将处于送袜路径4当
中的袜子进行夹持;
42.驱动组件8能够与夹持组件7联动,可驱动夹持组件7运动,形成例如移动拉扯、卷绕、辊筒输送等方式,将被夹持的袜子从织袜机1拉出,从而使得袜子能够朝向吸袜筒201的方向悬垂,以便吸袜筒201顺畅将袜子吸入。当夹持组件7在远离送袜路径4的位置时,夹持组件7能够从送袜路径4附近移开,避免产生机构之间的动作干涉,供拾取组件3移动。
43.如图2、3所示,夹持组件7包括夹持座71、夹持件72以及动力件75,其中夹持座71作为夹持组件7的基础支撑,安装在移动组件9上;夹持件72则安装在夹持座71上,并受动力件75驱动可作夹持动作,而该夹持件72可采用多种形式,例如,采用铰接或者滑动的方式连接的夹块,或者是采用偏心轮结构等能够实现夹持动作的结构。
44.为了袜子能够在夹持件72当中进出,该夹持件72通过一端支撑,另一端则形成可开闭的夹口73;在夹口73打开的状态下,送袜路径4处的袜子可从夹口73进入夹持件72,夹口73闭合后,夹持件72能够将袜子夹持。在对袜子进行输送过程中,采用夹持的结构,能够提高袜子输送的稳定性。
45.如图4所示,夹持件72包括夹持件一721和夹持件二722,两者均为水平状态的杆件,其中夹持件一721一端安装在夹持座71上实现支撑,夹持件二722 一端则安装在活动块74上,通过活动块74与夹持座71连接,实现与夹持座71 间接连接;并且活动块74在夹持座71上可往复活动,并相对夹持件一721具有一定的活动行程,从而实现夹持件一721和夹持件二722之间形成可开闭的夹口73,能够对袜子进行夹持;
46.活动块74呈倒置的l形,夹持件二722安装在活动块74的横端741上,在夹持座71上开设滑槽711,活动块74的竖端742可滑动连接在该滑槽711当中,在滑槽711开口处覆盖盖板712进行限位;活动块74与夹持座71之间形成滑动连接结构,并通过动力件75驱动实现往复滑动。动力件75包括气缸一 751和弹性件一752,气缸一751的固定端安装在夹持座71上,输出端与活动块74连接,在工作时能够驱动活动块74向远离夹持件一721方向滑动;弹性件一752可采用拉簧,两端分别连接在夹持座71的下侧和活动块74的横端741 上,通过横端741上的缺口771实现挂接,弹性作用于活动块74上,能够在夹持件二722的活动行程内弹性驱动活动块74靠近夹持件一721。动力件75也可采用双向主动伸缩的结构,并且可取消弹性件一752。
47.在气缸一751工作时,气缸一751内压升高,克服弹性件一752的弹力,推动活动块74向上滑动,夹持件二722远离夹持件一721夹口73打开;在气缸一751泄压后,气缸一751内压降低,活动块74受弹性件一752和自重的作用下降,夹持件二722与夹持件一721靠拢,夹口73闭合。
48.如图4所示,驱动组件8可采用旋转输送的方式对夹持件72进行驱动,夹持件一721和夹持件二722的一端分别转动连接在夹持座71和活动块74上,并通过轴承811支承保持顺畅的转动,另一端为悬空端724。
49.驱动组件8包括旋转驱动器,旋转驱动器具有能够主动旋转的输出端,旋转驱动器主体安装在夹持座71上,旋转驱动器的输出端通过齿轮组与夹持件一 721实现传动,从而能够驱动夹持件一721旋转。旋转驱动器具体可采用驱动电机81或者气动旋转工具等能够旋转驱动的工具。
50.夹持时,夹持件一721和夹持件二722相互靠近的一侧将袜子夹紧,旋转驱动器工
作,夹持件一721旋转,通过摩擦力能够对袜子进行输送,从而将袜子的末端从织袜机1的当中移出。通过采用旋转输送的方式,使得袜子的输送长度不受空间位置的限制,能够更好地适应不同长度袜子的生产,并且较小地占用袜机的空间,利于实际生产使用。可在夹持件一721和夹持件二722的外周加工形成防滑纹路,以提高摩擦力,避免产生打滑。
51.以驱动电机为例,驱动电机81也可安装在活动块74上,将输出端与夹持件二722连接传动,以实现对袜子的旋转输送。或者,驱动电机81也可同时驱动夹持件一721和夹持件二722旋转,可通过皮带或者其他方式进行联动,并且保持夹持件一721和夹持件二722旋向相反,也能够对夹持件72进行旋转驱动,夹持件一721和夹持件二722均同时旋转的情况下,需要对转速进行适应性调节,保持袜子两侧的输送速度一致。
52.由于夹持件一721和夹持件二722需要在旋转过程中,对袜子进行输送,通过摩擦力进行驱动;在夹持件一721和夹持件二722上分别设置相互适配的夹持部723,并且夹持部723均为旋转体状。
53.在夹持件一721和夹持件二722相互靠拢后,夹持件一721和夹持件二722 上的夹持部723能够靠拢,能够对袜子稳定的夹持。而且夹持部723均为旋转体状,在旋转过程中,能够保持外周轮廓的稳定,夹持件一721和夹持件二722 始终维持夹持状态,从而能够对袜子稳定地输送。
54.例如,夹持件一721和夹持件二722的中间主体位置可采用圆柱形的结构,即为夹持部723。或者,夹持件一721和夹持件二722的夹持部723,也可以采用串珠状凸起的结构,也能够实现夹持输送。或者,夹持件一721和夹持件二 722上的夹持部723也可采用齿轮状的啮合结构,或者一个为圆柱形、一个为球形串珠状凸起的结构均能够实现夹持和旋转输送的动作。
55.为了便于袜子进入夹口73,可将夹持件一721和夹持件二722的悬空端724 设置成锥状或球头状,以便袜子能够更加顺畅地进入夹口73当中。
56.为了避免夹持件一721和夹持件二722与被夹持的袜子之间产生打滑,可在夹持件一721和夹持件二722的夹持部723位置,加工形成防滑纹路,通过防滑纹路增加与袜子之间的摩擦,保持稳定的输送效果。防滑纹路为表面凹凸结构,例如,防滑纹路可采用打磨或者挤压的方式形成的粗糙表面;或者,防滑纹路也可为加工在夹持件一721和夹持件二722上的凸齿和凹陷。
57.在夹持件一721和夹持件二722的外周也可加工形成防滑层,以代替防滑纹路;防滑层可采用橡胶材料支撑的防滑套或者高分子材料涂覆形成的防滑涂层,均能够起到防滑的效果。
58.移动组件9包括横移机构91和升降机构92,其中横移机构91能够驱动横向的移动,升降机构92能够驱动上下方向的升降,升降机构92和横移机构91 相互配合,从而能够带动夹持件72在横向和竖向两个维度上实现移动。
59.在支架上可先安装横移机构91,再在横移机构91上安装升降机构92,使得,升降机构92能够带动夹持件72在竖直方向上升降,横移机构91能够带动升降机构92和夹持件72一起在横向移动。或者两者的安装位置也可以进行调整,横移机构91能够带动夹持组件7在横向方向移动,升降机构92则能够带动横移机构91和夹持组件7一起在竖直方向升降。
60.具体地,横移机构91包括横移支撑件911、横移件912、导滑件一913和气缸二914;
横移支撑件911与支架6固定连接,形成一体结构,导滑件一913 呈水平走向安装在横移支撑件911上,并且与送袜路径4大致垂直,横移件912 通过导滑件一913滑动连接于横移支撑件911上,能够实现往复滑动;气缸二 914安装在横移支撑件911上,其驱动端与横移件912连接,能够对横移件912 驱动推动。
61.该气缸二914可采用双向伸缩的机构,从而能够直接带动横移件912往复移动;或者,气缸三924仅采用气动推动的结构,配合弹性件二915进行动作,弹性件二915可为拉簧,两端分别连接在横移支撑件911和横移件912之间,通过弹性能够带动气缸二914的输出端回复,形成往复驱动。
62.升降机构92包括升降支撑件921、升降件922、导滑件二923、和气缸三 924;升降支撑件921固定安装在横移件912上,从而实现与横移机构91的联动,导滑件二923呈竖直走向安装在升降支撑件921上,升降件922通过导滑件二923滑动连接在升降支撑件921上,能够实现往复的升降滑动;气缸三924 安装在升降支撑件921上,其驱动端与升降件922连接,通过气缸能够对升降件922进行上下驱动。气缸三924在工作过程中,缸内充压,驱动端上升可带动升降件922向上移动,缸内泄压,驱动端在自身及夹持组件7的作用下自动下降回缩,从而实现升降双向的动作。
63.当升降机构92带动夹持件72移动至最上端,横移机构91带动升降机构92 和夹持件72移动至最前端,此时夹持组件7处于靠近送袜路径4位置,夹持件 72的夹口73处于送袜路径4处,袜子进入到夹口73当中,夹持件72可将袜子夹持。当升降机构92带动夹持件72移动至最下端,横移机构91带动升降机构 92和夹持件72移动至最后端,此时夹持组件7处于远离送袜路径4位置,夹持组件7从织袜机1和缝袜机2之间离开,避免对拾取组件3以及袜机的其他部件产生动作干涉。
64.本实施例还公开一种一体织缝翻织袜机,包括织袜机1、缝袜机2、拾取组件3以及上述袜子输送器5;袜子输送器5安装于织袜机1和缝袜机2之间,对应于送袜路径4的一侧,能够与拾取组件3配合,将被夹持的袜子从织袜机1 拉出,从而使得袜子能够朝向吸袜筒201的方向悬垂,以便吸袜筒201顺畅将袜子吸入。
65.实施例二
66.本实施例公开一种织袜机的往复式袜子输送器,在实施例一的基础上,再参照图5、6进行说明;与实施例一相比,对夹持组件7的结构进行重新设计,夹持件一721和夹持件二722之间也可采用转动连接的方式实现开闭。
67.如图5所示,夹持组件7中,活动块74的中段转动连接在夹持座71上,并且转动轴的轴线与夹持件一721、夹持件二722均为平行状态,夹持架二的一端安装在活动块74上,使得在活动块74转动过程中夹持件二722始终保持与夹持件一721平行状态。
68.具体地,活动块74也可采用倒置的l形状态,上侧的横端741上安装夹持件二722,下侧的竖端742中间位置与夹持座71转动连接,横端741上的夹持件二722位于夹持件一721的上侧,并可相对夹持件一721做开闭动作。
69.动力件75结构根据活动块74的形状进行适应性安装,动力件75中气缸一 751的输出端可横向伸缩,并与横端741相抵,相互抵压的结构,能够传递动力,也能够适应活动块74摆动后的变化,适应性更加。弹性件一752仍可采用拉簧,弹性作用在活动块74上,以驱动活动块74弹性回复,活动块74的形状,可根据弹簧的位置进行适应性弯折,避免产生干涉。
70.如图6所示,夹持组件7的夹持件一721和夹持件二722之间也可采用另一种转动结构。该实施方式中,活动块74与夹持座71之间采用转动连接,且转动轴的轴线呈水平状态,与夹持件一721、夹持件二722均垂直。活动块74 在转动过程中,夹持件一721和夹持件二722形成剪刀口的开闭状态,所形成的夹口73形成外端扩大的喇叭口,使得夹口73能够更容易对准送袜路径4处的袜子。
71.具体地,活动块74的两侧均固定连接活动架743,活动架743的中段通过转动轴与夹持座71转动连接,活动架743的上端上固定活动块74,并连接弹性件一752;下端通过气缸一751的输出端抵压驱动,以驱动活动块74摆动,实现夹持件二722的往复移动。
72.实施例三
73.本实施例公开一种织袜机的往复式袜子输送器,在实施例一或二的基础上,再参照图7、8进行说明;与上述相比,对驱动组件8的结构进行重新设计,可采用往复移动的方式对袜子进行输送,以替换旋转输送的方式。
74.夹持组件7受驱动组件8的驱动,能够在起点位置和终点位置之间往复移动,其中起点位置位于送袜路径上;而且终点位置与针筒组件的距离大于起点位置与针筒组件101的距离。在运行过程中,打开的夹持组件7先位于起点位置,能够送袜路径4处的袜子夹持;而后向终点位置移动,由于终点位置距离针筒组件101的距离更远,因此能够将袜子从针筒组件101向外拉扯;而后夹持组件7打开,再重新移动至起点位置,不断往复直至将袜子从针筒组件101 中拉出。
75.驱动组件8包括驱动座82、驱动块85、导向件83和驱动机构84,其中,驱动座82安装在移动组件9上形成基础支撑,驱动座82和驱动块85之间通过导向件83进行导滑,使得驱动块85能够沿着送袜路径4方向往复移动,并通过驱动机构84驱动,将夹持后的袜子朝向缝袜机2的方向拉扯,对袜子进行输送。夹持件一721和夹持件二722均采用固定的结构,分别安装在夹持座71和活动块74上,对袜子夹持后更加稳定。
76.如图7所示,驱动组件8可采用往复滑动的结构,导向件83采用滑轨,并沿着送袜路径4的方向布置。驱动组件8沿着滑轨滑动至靠近针筒组件101的一端位置时,即处于起点位置,如图7所示;沿着滑轨滑动至靠近缝齿盘202 的一端位置时,即处于终点位置,如图8所示;
77.具体地,滑轨、驱动块85和夹持座71相互固定,驱动座82与滑轨滑动适配,形成滑动连接结构。驱动机构84采用可往复线性动作的伸缩件,例如气缸,驱动机构84的固定端安装在驱动座82上,输出端与驱动块85连接,以带动驱动块85和夹持组件7滑行。
78.如图9所示,驱动座82和驱动块85之间也可采用转动连接的方式,通过摆动实现驱动块85以及夹持组件7的往复移动。驱动组件8摆动至靠近针筒组件101的一侧的位置时,即处于起点位置;摆动至靠近缝齿盘202的一侧位置时,即处于终点位置;
79.导向件83为转轴86,驱动机构84为旋转驱动器,例如可采用驱动电机81,驱动块85通过转轴86转动连接于驱动座82,驱动电机81能够带动驱动块85 实现往复摆动;驱动块85的上端安装夹持组件7,在驱动块85摆动过程中,夹持组件7能够沿着送袜路径4的大致方向实现往复移动。驱动块85在向织袜机 1方向移动过程中,夹持件72的夹口73打开,供袜子进入;在向缝袜机2方向移动过程中,夹持件72将袜子夹持,能够将袜子从织袜机1拉出。
80.实施例四
81.本实施例公开一种织袜机的往复式袜子输送器,在实施例一基础上,再参照图10进行说明;与上述相比,对移动组件9的结构进行重新设计,可采用摆动的方式对夹持组件7进行移动,以代替滑动的方式。
82.如图10所示,移动组件9包括摆动杆97和摆动电机98,摆动杆97的下端转动连接在支架6上,上端固定安装夹持座71,以支撑夹持组件7;摆动电机 98采用伺服电机,输出端与摆动杆97连接,能够驱动摆动杆97往复摆动,摆动过程中,以带动夹持组件7能够相对织袜机1和缝袜机2之间的送袜路径4 移动。在摆动杆97的上端向下摆动,可将夹持组件7移动至远离送袜路径4的位置;摆动杆97的上部向上摆动至几乎垂直,可将夹持组件7移动至靠近送袜路径4的位置,送袜路径4中的袜子落入夹持组件7的夹口73,可对袜子夹持输送。
83.在支架6上对应与摆动杆97的一侧位置可固定安装挡块99,并且在挡块 99与摆动杆97之间安装弹性件三910,从而对摆动杆97的动作进行弹性限位,避免摆动杆97摆动浮动过大而产生碰撞。
84.根据夹持组件7需要移动的行程,可设置多组移动组件9配合传动,或者将滑动方式和摆动方式相互结合,从而适应不同的袜机。
85.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1