一种方向盘套拼缝机的送料机构的制作方法
1.本实用新型涉及方向盘套拼缝加工领域,具体地说是一种方向盘套拼缝机的送料机构。
背景技术:
2.方向盘套指套在方向盘上的套子。现有的方向盘套是由一片片皮料缝合而成,现有的技术是由人工缝合拼皮,然而劳动强度高,工作效率较低,且自动化程度较低。
技术实现要素:
3.本实用新型针对方向盘套缝纫加工过程中多个不同皮料无法依顺序自动化上料的技术问题,而提供一种方向盘套拼缝机的送料机构,实现各个皮料形状识别并依次准确地抓料和送料。
4.本实用新型解决上述技术问题所采用的技术方案为:一种方向盘套拼缝机的送料机构,包括机架,机架安装有放料板、以及用于识别放料板上多个皮料形状的摄像头;放料板的上方设有用于抓取皮料的抓料结构、以及用于驱动抓料结构和皮料移动到指定坐标的x轴传动结构、y轴传动结构和z轴传动结构。
5.为优化上述技术方案,本实用新型还包括以下改进的技术方案。
6.上述的x轴传动结构包括固定安装在机架上的第一模组、沿第一模组直线移动的第一滑块、与第一滑块连接的第一同步带、用于驱动第一同步带转动的x电机;第一滑块设有用于安装y轴传动结构的第二送料连接板。
7.上述的y轴传动结构包括与第二送料连接板固定连接的第二模组、沿第二模组直线移动的第二滑块、与第二滑块连接的第三同步带、用于驱动第三同步带转动的y电机;第二滑块与z轴传动结构连接。
8.上述的z轴传动结构包括送料安装板,送料安装板设有能升降的吸料板,吸料板固定安装有吸盘。
9.上述的送料安装板安装有第三同步轮和第四同步轮,在第三同步轮和第四同步轮之间设有第四同步带,z电机固定在送料安装板上并且输出轴与第三同步轮连接;吸料板通过第四送料连接板固定有第六送料连接板,第六送料连接板通过固定块、皮带连接块与第四同步带固定连接。
10.上述送料安装板的两侧固定有第一滑轨,吸料板连接有第三送料连接板,第三送料连接板通过第三滑块滑动安装在第一滑轨上。
11.与现有技术相比,本实用新型的用于方向盘套拼缝机的送料机构,通过摄像头拍摄放料板上的皮料图片,利用视觉识别技术分别确定各个皮料的形状和位置坐标,利用的x轴传动结构、y轴传动结构和z轴传动结构带动抓料结构移动到指定的皮料处抓取并送至方向盘套拼缝机。各个皮料可随意放置在放料板上,提高了放料效率。各个皮料的形状经识别后,按顺序依次送料,由方向盘套拼缝机拼接缝纫后加工成方向盘套,提高了送料效率,节
省了人力。
附图说明
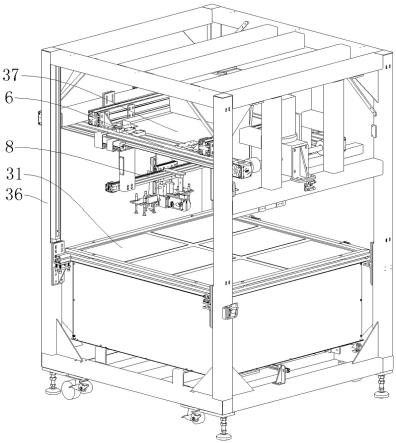
12.图1是本实用新型实施例的整体结构示意图。
13.图2是x轴传动结构的结构示意图。
14.图3是y轴传动结构的结构示意图。
15.图4是z轴传动结构的结构示意图。
具体实施方式
16.以下结合附图对本实用新型的实施例作进一步详细描述。
17.图1至图4所示为本实用新型的结构示意图。
18.其中的附图标记为:涡轮箱1、x电机2、驱动轴3、第一同步带4、第一滑块5、第一模组6、第二送料连接板7、第二模组8、第一送料连接板9、y电机10、第二同步带11、第三同步带12、第二滑块13、送料安装板14、z电机15、第三送料连接板16、第四同步带17、第四送料连接板18、第四同步轮安装座19、第一滑轨20、第三滑块21、第一送料连接块22、吸料板23、吸盘24、行程开关25、第六送料连接板26、固定块27、皮带连接块28、第三同步轮安装座装29、标定板30、放料板31、标定连接板32、第二滑轨33、固定板34、第四滑块35、机架36、光源37。
19.本实用新型一种方向盘套拼缝机的送料机构,包括x轴传动结构、y轴传动结构、z轴传动结构和抓料结构。
20.x轴传动结构包括固定安装在机架36上的涡轮箱1。涡轮箱1上方安装有驱动源x电机2。涡轮箱1的两侧分别装有驱动轴3,驱动轴3的一端与涡轮箱1连接并一起转动,驱动轴3的另一端带动第一同步带4一起转动。第一同步带4与第一滑块5的中部固定连接。在第一模组6表面开设有引导第一滑块5滑动的槽,第一滑块5沿第一模组6滑动。两侧的第一滑块5上分别安装有第二送料连接板7。x电机2通过第一同步带4驱动第一滑块5沿第一模组6滑动,带动第二模组8在x轴方向移动。
21.模组包括铝型材、位于铝型材两端的同步轮安装座。在两个同步轮安装座内装有同步轮,两同步轮通过同步带连接,同步带装在铝型材内部。铝型材通过导向结构设有滑块,滑块与同步带固定连接。
22.y轴传动结构包括与两块第二送料连接板7固定连接的第二模组8。第二模组8的一端装有第一送料连接板9,第一送料连接板9与y电机10固定连接,y电机10通过驱动第二同步带11来带动位于第二模组8中的第三同步带12运动。在第二模组8上安装有第二滑块13,第二滑块13中部与第三同步带12固定连接,第二滑块13沿第二模组8滑动。y电机10通过第二同步带11驱动第三同步带12转动,从而带动第二滑块13沿第二模组8滑动,带动z轴传动结构在y轴方向移动。
23.z轴传动结构包括安装在第二滑块13上的送料安装板14。送料安装板14上装有z电机15,z电机15的输出轴安装有第三同步轮,第三同步轮通过第四同步带17与第四同步轮连接。第三同步轮通过第三同步轮安装座装29在送料安装板14的下部,第四同步轮通过第四同步轮安装座19安装在送料安装板14的上部。送料安装板14上装有两根第一滑轨20,第一滑轨20与第三滑块21配合运动。第三滑块21上安装有第三送料连接板16,第三送料连接板
16与第四送料连接板18固定连接。位于送料安装板14左右两侧的两块第四送料连接板18分别与第六送料连接板26的两侧连接,第六送料连接板26通过固定块27、皮带连接块28与第四同步带17固定连接。第四送料连接板18通过第一送料连接块22与吸料板23固定连接。z电机15驱动第四同步带17带动吸料板23的升降,吸盘24吸住皮料进行送料。
24.抓料结构包括装在吸料板23上的八个吸盘24,吸盘24对称的分布在吸料板23的两侧,并且呈矩形排布。吸料板23的下表面装有行程开关25,行程开关25低于吸盘24的高度。在吸盘24吸取皮料时,当行程开关25接触到皮料便会控制机器停止运行。
25.吸料板23与标定连接板32固定连接,标定连接板32上装有第二滑轨33,第二滑轨33与第四滑块35配合。第四滑块35能从第二滑轨33上取下。第四滑块35上装有固定板34,固定板34与标定板30连接,标定板30上开设有圆孔。机架36的上部装有光源37,放料板31的下方设有两个摄像头,放料板31是由玻璃制成的。摄像头拍摄标定板30在放料板31上的光影,系统通过九点标定法来确定坐标系。
26.摄像头拍摄皮料在放料板31上的光影,然后传输到系统。系统通过识别拍摄的光影来确定各个皮料在放料板31上位置信息,实现准确的抓取皮料。
27.在第一次使用时,系统通过九点标定法来确定坐标系。工作时,把各个形状的皮料放置在放料板31上,摄像头拍摄传输到系统,系统通过拍摄信息来识别皮料在放料板31上位置信息。之后系统根据位置信息控制x电机2、y电机10运动到皮料上方。然后z电机15驱动吸料板23向下,吸料板23下方的吸盘24吸住皮料,z电机15带动吸住的皮料向上运动。最后通过x电机2、y电机10把皮料送至下一工序。
28.本实用新型的最佳实施例已阐明,由本领域普通技术人员做出的各种变化或改型都不会脱离本实用新型的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1