服装厂自动洗衣系统的制作方法
1.本实用新型涉及工业洗衣机技术领域,具体的,涉及服装厂自动洗衣系统。
背景技术:
2.近年来随着国民经济的飞速发展,人民生活水平不断提高,洗涤行业产业化进程明显加快,社会对工业洗衣机的需求不断增加,工业洗衣机广泛应用于服装厂,现有服装厂洗衣系统多采用直接启动(硬启动)的方式使洗衣机运行,直接启动电流要远大于洗衣机电机额定电流。启动时所造成的过载冲击很大,长期这样下去将会严重影响电机的使用寿命,同时将会对电网造成影响。
技术实现要素:
3.本实用新型提出服装厂自动洗衣系统,解决了现有技术中由于直接启动电流大,影响洗衣机电机使用寿命的问题。
4.本实用新型的技术方案如下:
5.服装厂自动洗衣系统,包括控制单元、通信电路、控制终端和洗衣机驱动单元,所述控制单元用于控制洗衣机驱动单元,所述控制单元通过所述通信电路与所述控制终端通信,所述洗衣机驱动单元包括电机驱动电路,所述电机驱动电路包括电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、瞬态抑制二极管d1、场效应管q1、二极管d3、场效应管q2和瞬态抑制二极管d2,所述场效应管q1的栅极通过所述电阻r5作为所述电机驱动电路的第一输入端,所述场效应管q1的漏极通过所述电阻r1连接vcc电源,所述场效应管q1的源极通过所述电阻r4连接洗衣机电机线圈的第一端,所述瞬态抑制二极管d1的第一端连接所述场效应管q1的栅极,所述瞬态抑制二极管d1的第二端通过所述电阻r3连接所述二极管d3的阴极,所述二极管d3的阳极连接洗衣机电机线圈的第二端,所述场效应管q2的栅极通过所述电阻r2作为所述电机驱动电路的第二输入端,所述场效应管q2的漏极连接洗衣机电机线圈的第二端,所述场效应管q2源极接地,所述瞬态抑制二极管d2的第一端连接所述场效应管q2的栅极,所述瞬态抑制二极管d2的第二端接地。
6.进一步,本实用新型中所述电机驱动电路还包括二极管d4、电阻r10和电容c4,所述二极管d4的阴极连接所述场效应管q1的漏极,所述二极管d4的阳极通过所述电阻r10连接所述场效应管q1的源极,所述电容c4并联在所述电阻r10两端。
7.进一步,本实用新型中所述洗衣机驱动单元还包括隔离电路,所述隔离电路包括第一隔离电路和第二隔离电路,所述第一隔离电路和所述第二隔离电路的输入端均连接所述控制单元,所述第一隔离电路的输出端连接所述电机驱动电路的第一输入端,所述第二隔离电路的输出端连接所述电机驱动电路的第二输入端,所述第一隔离电路和所述第二隔离电路的电路结构相同,所述第一隔离电路包括电阻r6、电阻r7、电阻r8、三极管q3、光耦u1、电阻r9和稳压管d5,所述三极管q3的基极通过所述电阻r6连接控制单元,所述三极管q3的基极通过所述电阻r7接地,所述三极管q3的集电极连接所述光耦u1的第一输出端,所述
三极管q3的发射极接地,所述光耦u1的第二输入端连接5v电源,所述光耦u1的输出供电端连接5v电源,所述光耦u1的输出端连接所述电机驱动电路第一输入端,所述电阻r9的第一端连接5v电源,所述电阻r9的第二端连接所述稳压管d5的阴极,所述稳压管d5的阳极接地。
8.进一步,本实用新型中所述水位检测电路包括水位传感器、电阻r11、电容c5、场效应管q4、场效应管q5、反相器u2、反相器u3、电阻r14和电容c7,所述电阻r11的第一端连接所述水位传感器的第一端,所述水位传感器的第二端接地,所述电阻r11的第二端通过所述电容c5连接所述场效应管q5的栅极,所述场效应管q5的源极连接5v电源,所述场效应管q5的漏极连接所述场效应管q4的漏极,所述场效应管q5栅极连接所述场效应管q4的栅极,所述场效应管q4的源极接地,所述场效应管q4栅极和所述场效应管q5栅极的连接点通过所述电阻r12连接所述场效应管q4漏极和所述场效应管q5漏极的连接点,所述反相器u2的输入端连接所述场效应管q4漏极和所述场效应管q5漏极的连接点,所述反相器u2的输出端通过所述电阻r15连接所述电阻r11的第一端,所述反相器u2的输出端连接所述反相器u3的输入端,所述反相器u3的输出端连接所述电阻r14的第一端,所述电阻r14第二端连接所述控制单元,所述电容c7的第一端连接所述电阻r14的第二端,所述电容c7的第二端接地。
9.进一步,本实用新型中还包括称重检测电路,所述称重检测电路包括电阻r20、电容c8、二极管d6、电阻r16、电容c9、光耦u4、电阻r17、三极管q6、电阻r18和电阻r19,所述电阻r20的第一端连接洗衣机电机线圈的第一端,所述电阻r20的第二端连接所述光耦u4的第一输入端,所述光耦u4的第二输入端连接洗衣机电机线圈的第二端,所述电容c8的第一端连接所述电阻r20的第一端,所述电容c8的第二端连接所述光耦u4的第二输入端,所述二极管d6的阴极连接所述电阻r20的第二端,所述二极管d6的阳极连接所述光耦u4的第二输入端,所述电阻r16并联在所述二极管d6两端,所述电容c9并联在所述电阻r16两端,所述光耦u4的第一输出端连接3.3v电源,所述光耦u4的第二输出端通过所述电阻r17连接所述三极管q6的基极,所述三极管q6的集电极通过所述电阻r18连接3.3v电源,所述三极管q6的集电极通过所述电阻r19连接所述控制单元,所述三极管q6的发射极接地。
10.本实用新型的工作原理及有益效果为:
11.本实用新型中,电机驱动电路的第一输入端和第二输入端所对应的第一输入控制信号和第二输入存在时间差,第一输入控制信号比第二输入控制信号时刻早,即场效应管q1比场效应管q2的导通时刻早,截止时刻晚,场效应管q1导通一段时间后,场效应管q2导通,此时洗衣机电机线圈通电,实现洗衣机电机的“软启动”。当场效应管q2导通时,场效应管q1处于截止状态,所以场效应管q2导通时电流为0;当场效应管q2截止时,场效应管q1已经处于截止状态,所以场效应管q2截止时电压为0。这样大大降低了电路的复杂程度,提高了可靠性。瞬态抑制二极管d1和瞬态抑制二极管d2可以抑制瞬间产生的大电压击穿场效应管,起到了很好的保护作用,电阻r1和电容c1组成的限流蓄能电路,当洗衣机不工作时,电源通过电阻r1给电容c1充电,当洗衣机工作时,存储于电容c1内的能量释放出来,使流过洗衣机电机线圈上的电流迅速由上升,同时电阻r1限制了电源电流的突变,将电源提供的电流限制在较小的范围内;当控制单元输出的信号为低电平时,场效应管q1截止,电源又通过电阻r1给电容c1充电,为下一次驱动做准备。
12.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
附图说明
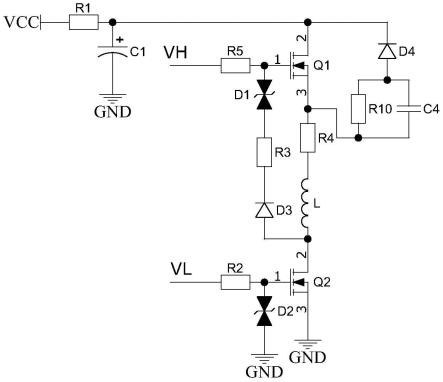
13.图1为本实用新型中电机驱动电路的电路图;
14.图2为本实用新型中第一隔离电路的电路图;
15.图3为本实用新型中水位检测电路的电路图;
16.图4为本实用新型中称重检测电路的电路图。
具体实施方式
17.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都涉及本实用新型保护的范围。
18.实施例1
19.如图1所示,本实施例提出了服装厂自动洗衣系统,包括控制单元、通信电路、控制终端和洗衣机驱动单元,控制单元用于控制洗衣机驱动单元,控制单元通过通信电路与控制终端通信,洗衣机驱动单元包括电机驱动电路,电机驱动电路包括电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、瞬态抑制二极管d1、场效应管q1、二极管d3、场效应管q2和瞬态抑制二极管d2,场效应管q1的栅极通过电阻r5作为电机驱动电路的第一输入端,场效应管q1的漏极通过电阻r1连接vcc电源,场效应管q1的源极通过电阻r4连接洗衣机电机线圈的第一端,瞬态抑制二极管d1的第一端连接场效应管q1的栅极,瞬态抑制二极管d1的第二端通过电阻r3连接二极管d3的阴极,二极管d3的阳极连接洗衣机电机线圈的第二端,场效应管q2的栅极通过电阻r2作为电机驱动电路的第二输入端,场效应管q2的漏极连接洗衣机电机线圈的第二端,场效应管q2源极接地,瞬态抑制二极管d2的第一端连接场效应管q2的栅极,瞬态抑制二极管d2的第二端接地。
20.电机直接启动的时候电流比较大,因为大的启动电流一方面会对洗衣机电机本身造成损伤,另一方面会对供电电网造成冲击,因此抑制洗衣机电机的启动电流是必要的,软启动控制的主要作用是减小电机的启动电流。
21.通过控制单元来控制洗衣机驱动单元,洗衣机驱动单元带动洗衣机电机运转,控制单元通过输出不同占空比的pwm信号来控制洗衣机驱动单元,控制终端通过通信单元与控制单元通信连接,工作人员可以通过控制终端选择不同的工作模式可改变控制单元输出pwm信号的占空比,工作人员可以根据所洗衣物的不同选择对应的工作模式。
22.本实施例中,电机驱动电路的第一输入端和第二输入端所对应的第一输入控制信号和第二输入存在时间差,第一输入控制信号比第二输入控制信号时刻早,即场效应管q1比场效应管q2的导通时刻早,截止时刻晚,场效应管q1导通一段时间后,场效应管q2导通,此时洗衣机电机线圈通电,实现洗衣机电机的“软启动”。当场效应管q2导通时,场效应管q1处于截止状态,所以场效应管q2导通时电流为0;当场效应管q2截止时,场效应管q1已经处于截止状态,所以场效应管q2截止时电压为0。这样大大降低了电路的复杂程度,提高了可靠性。瞬态抑制二极管d1和瞬态抑制二极管d2可以抑制瞬间产生的大电压击穿场效应管,起到了很好的保护作用,电阻r1和电容c1组成的限流蓄能电路,当洗衣机不工作时,电源通过电阻r1给电容c1充电,当洗衣机工作时,存储于电容c1内的能量释放出来,使流过洗衣机
电机线圈上的电流迅速由上升,同时电阻r1限制了电源电流的突变,将电源提供的电流限制在较小的范围内;当控制单元输出的信号为低电平时,场效应管q1截止,电源又通过电阻r1给电容c1充电,为下一次驱动做准备。
23.如图1所示,本实施例中电机驱动电路还包括二极管d4、电阻r10和电容c4,二极管d4的阴极连接场效应管q1的漏极,二极管d4的阳极通过电阻r10连接场效应管q1的源极,电容c4并联在电阻r10两端。
24.二极管d4、电阻r10和电容c4组成吸收电路,若场效应管q1断开,蓄积在寄生电感中能量通过场效应管q1的寄生电容充电,其电压上升到吸收电容c4的电压时,二极管d4导通,场效应管q1的开关电压被二极管d4所嵌位,寄生电感中蓄积的能量也对电容c4充电。场效应管q1导通期间,电容c4通过电阻r10放电。吸收电路可以防止场效应管损坏,吸收防止电压击穿,提高场效应管工作的可靠性,降低器件损耗。
25.如图2所示,本实施例中洗衣机驱动单元还包括隔离电路,隔离电路包括第一隔离电路和第二隔离电路,第一隔离电路和第二隔离电路的输入端均连接控制单元,第一隔离电路的输出端连接电机驱动电路的第一输入端,第二隔离电路的输出端连接电机驱动电路的第二输入端,第一隔离电路和第二隔离电路的电路结构相同,第一隔离电路包括电阻r6、电阻r7、电阻r8、三极管q3、光耦u1、电阻r9和稳压管d5,三极管q3的基极通过电阻r6连接控制单元,三极管q3的基极通过电阻r7接地,三极管q3的集电极连接光耦u1的第一输出端,三极管q3的发射极接地,光耦u1的第二输入端连接5v电源,光耦u1的输出供电端连接5v电源,光耦u1的输出端连接电机驱动电路第一输入端,电阻r9的第一端连接5v电源,电阻r9的第二端连接稳压管d5的阴极,稳压管d5的阳极接地。
26.本实施例中,为提高场效应管的开关速度,场效应管的栅极需要驱动电压和较大的驱动电流以建立栅极电压,由于控制单元的驱动能力有限,一般不足以驱动电机驱动电路,为了避免控制单元在洗衣机电机启动和停止时受到干扰,必须采取隔离措施。
27.在第一隔离电路中,控制单元输出端pwm信号首先通过三极管q3放大,然后通过光耦u1进行隔离,最后用放大后的pwm信号驱动场效应管q1,由于第一隔离电路和第二隔离电路的电路结构相同,因此第二隔离电路的原理同第一隔离电路。
28.如图3所示,本实施例中还包括水位检测电路,水位检测电路包括水位传感器、电阻r11、电容c5、场效应管q4、场效应管q5、反相器u2、反相器u3、电阻r14和电容c7,电阻r11的第一端连接水位传感器的第一端,水位传感器的第二端接地,电阻r11的第二端通过电容c5连接场效应管q5的栅极,场效应管q5的源极连接5v电源,场效应管q5的漏极连接场效应管q4的漏极,场效应管q5栅极连接场效应管q4的栅极,场效应管q4的源极接地,场效应管q4栅极和场效应管q5栅极的连接点通过电阻r12连接场效应管q4漏极和场效应管q5漏极的连接点,反相器u2的输入端连接场效应管q4漏极和场效应管q5漏极的连接点,反相器u2的输出端通过电阻r15连接电阻r11的第一端,反相器u2的输出端连接反相器u3的输入端,反相器u3的输出端连接电阻r14的第一端,电阻r14第二端连接控制单元,电容c7的第一端连接电阻r14的第二端,电容c7的第二端接地。
29.洗衣机对服装进行洗涤时,洗衣机中的水位直接影响洗净度、水流强度、洗涤时间等参数。因此需要对洗衣机水位进行检测,且要求水位的检测必须是连续的,本实施例中采用谐振式水位传感器,谐振式水位传感器是利用电磁谐振电路lc作为传感器的敏感元件,
将被测水位的变化转换为lc电路参数的变化,最终以频率参数的形式输出。谐振式水位传感器的输出信号为频率可变的正弦信号,我们实际应用过程中,需要将此信号经过放大、整形、滤波,最终得到控制单元可识别的方波信号。
30.水位传感器根据水位的变化输出不同频率的电信号,经过由电阻r11和电容c5组成的阻容滤波电路滤波处理后送至场效应管q4和场效应管q5的栅极,场效应管q4和场效应管q5并联构成cmos反相器,电阻r12为偏置电阻,为场效应管q4和场效应管q5提供合适的静态工作点,滤波后的信号经场效应管q4和场效应管q5并联构成cmos反相器放大后送至反相器u2和反相器u3两极反相放大输出方波信号,为了使输出的方波信号更加稳定,通过电阻r14和电容c7组成的低通滤波电路对输出方波信号进行滤波处理,最后将滤波后的信号送至控制单元。
31.如图4所示,本实施例中还包括称重检测电路,称重检测电路包括电阻r20、电容c8、二极管d6、电阻r16、电容c9、光耦u4、电阻r17、三极管q6、电阻r18和电阻r19,电阻r20的第一端连接洗衣机电机线圈的第一端,电阻r20的第二端连接光耦u4的第一输入端,光耦u4的第二输入端连接洗衣机电机线圈的第二端,电容c8的第一端连接电阻r20的第一端,电容c8的第二端连接光耦u4的第二输入端,二极管d6的阴极连接电阻r20的第二端,二极管d6的阳极连接光耦u4的第二输入端,电阻r16并联在二极管d6两端,电容c9并联在电阻r16两端,光耦u4的第一输出端连接3.3v电源,光耦u4的第二输出端通过电阻r17连接三极管q6的基极,三极管q6的集电极通过电阻r18连接3.3v电源,三极管q6的集电极通过电阻r19连接控制单元,三极管q6的发射极接地。
32.本实施例中,通过模糊称重方式来对洗衣机内衣物重量进行检测,由于洗衣机电机的负载直接受筒内衣物重量的影响,因此称重检测电路利用惯性原理来检测洗衣机中所洗衣物的重量,称重检测电路的输入端连接洗衣机电机的通电线圈的第一端和第二端,电容c8、c9和c10为滤波电容,洗衣机电机未启动时,光耦u4不动作,称重检测电路输出高电平;洗衣开始后,电机先通电运转数秒,然后停止通电,电机断电后,由于惯性,定子绕组切割转子剩磁形成的旋转磁场,产生感应电动势,当这个交变的感应电动势加在光耦u4上,使其每周导通一次,从而输出一个低电压脉冲。衣量越多,电动机负载越大,断电后电动机惯性运转时间就越短,脉冲数也越少;衣量越少,电动机负载越小,断电后电动机惯性运转时间就越长,脉冲数也就越多。这些脉冲经放大整形后输入控制单元,控制单元再对脉冲数据与预先设定好的重量转数比进行比对,从而判断洗衣机桶内衣物的重量。控制单元还可以根据衣物的重量计算出所需水量,因此控制单元可通过洗衣机内衣物的重量来控制洗衣机内水位。从而提高洗衣的效果。
33.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1