在裁片上进行传统手工刺绣的无人化作业方法和系统与流程
本发明涉及服装加工。更具体地说,本发明涉及一种在裁片上进行传统手工刺绣的无人化作业方法和系统。
背景技术:
1、刺绣,古代称之为针绣,使用绣针引彩线,将设计的花纹在纺织品上刺绣运针,以绣迹构成花纹图案的一种工艺。刺绣的针法有:齐针、套针、扎针、长短针、打子针、平金、戳沙等十几种。刺绣按照材料又可分为丝绣、羽毛绣和发绣。绣品的主要用途包括:生活服装、歌舞或戏曲服饰、台布、枕套、靠垫等生活日用品及屏风、壁挂等陈设品。
2、传统的刺绣过程完全由人工完成,劳动强度大,消耗时间长。随着工业化进程加快,传统手工刺绣速度已经不能满足市场需求,故更加适应工业化生产的刺绣机出现。刺绣机又称电脑绣花机,它是当代最先进的刺绣机械,它使传统的手工绣花得到高速度、高效率的实现。电脑绣花机使用时,先要绘制画稿样板,再输入到绣花机中或直接从绣花机的画稿样板库中选取,然后设置各种刺绣参数,接着需要手动将待绣的绣片固定到绷框上,最后就可以将绷框置于绣花机机台上开始刺绣了。但是机器刺绣一般以普通的单面绣为主,刺绣图案简单,所用绣线都是一样粗细,没有层次感,故机器刺绣外观呆板,立体感欠缺,不够灵动。
3、现有技术中已经出现了机械臂和机械手,机械臂有可以替代外科医生的达芬奇机械臂,机械手有五指仿人手。另外,在本司之前申请的专利中,公开了如下几项技术:在申请号为2023101688022的专利中公开了一种ugc的订单生成及订单驱动生产的服装供销方法,在上述方法中生成的实体产品生产订单就包括用户的服装款式数据,该服装款式数据包括服装裁片尺寸数据和缝合关系数据、面料数据等,而在知晓服装裁片尺寸数据和缝合关系数据、面料数据后,根据这些数据确定生产工艺(包括缝制针号、线号、缝纫工艺,缝纫工艺包括平缝、绷缝、包缝等)并不困难,故实际上在服装款式数据确定后,完全可以确定生产工艺数据并记录实体产品生产订单上;在申请号为202211682241.x的专利中公开了一种不同款式衣服批量化流水线智能吊挂输送装置,能够根据制衣订单,利用动力机构使车体移动至对应工位。
4、基于上述已知技术,如何使用机械臂和机械手替代人工实现在裁片上进行传统手工刺绣是目前亟需解决的技术问题。
技术实现思路
1、本发明的一个目的是解决至少上述问题,并提供至少后面将说明的优点。
2、本发明还有一个目的是提供一种在裁片上进行传统手工刺绣的无人化作业方法和系统,在保证手工刺绣质量的基础上,提升了产业自动化程度,降低了人工成本。
3、为了实现根据本发明的这些目的和其它优点,提供了一种在裁片上进行传统手工刺绣的无人化作业方法,包括:
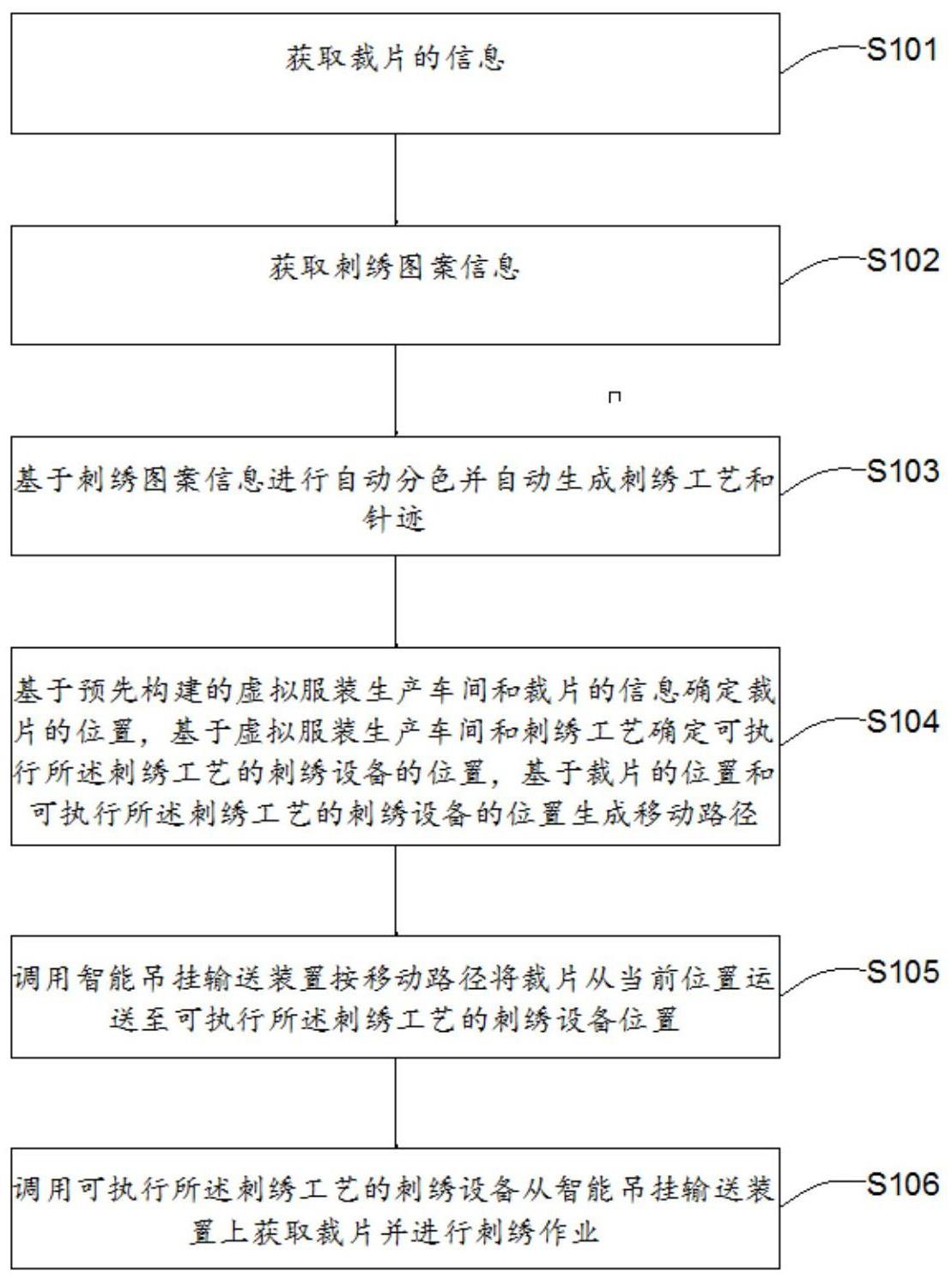
4、获取裁片的信息;
5、获取刺绣图案信息;
6、基于刺绣图案信息进行自动分色并自动生成刺绣工艺和针迹;
7、基于预先构建的虚拟服装生产车间和裁片的信息确定裁片的位置,基于虚拟服装生产车间和刺绣工艺确定可执行所述刺绣工艺的刺绣设备的位置,基于裁片的位置和可执行所述刺绣工艺的刺绣设备的位置生成移动路径;
8、调用智能吊挂输送装置按移动路径将裁片从当前位置运送至可执行所述刺绣工艺的刺绣设备位置;
9、调用可执行所述刺绣工艺的刺绣设备从智能吊挂输送装置上获取裁片并进行刺绣作业。
10、优选的是,所述刺绣工艺包括绣针属性、绣线属性、运针针法。
11、优选的是,所述虚拟服装生产车间是根据服装生产实体车间采用数字孪生构建得到,所述服装生产实体车间设置有多个刺绣设备,所述刺绣设备包括用于夹持裁片从而上绷的第一机械臂和第二机械臂,以及用于在第一机械臂和第二机械臂夹持的裁片上刺绣的第一机械手和第二机械手,所述可执行所述刺绣工艺的刺绣设备是指按照针迹顺序与当前针迹采用的刺绣工艺符合条件最多的刺绣设备。
12、优选的是,基于刺绣图案信息进行自动分色并自动生成刺绣工艺和针迹后,还包括:
13、获取在自动生成针迹的基础上人工调整得到的针迹;
14、采用自动生成的针迹和人工调整得到的针迹训练预先构建的机器学习模型,以使机器学习模型学习自动生成针迹不合理时的调整指令。
15、利用训练好的机器学习模型调整自动生成针迹。
16、优选的是,第一机械臂和第二机械臂的夹持部的夹持面设置有压力传感器和张力传感器,以用于控制对裁片的夹持力和上绷张力。
17、优选的是,刺绣设备还包括摄像头,裁片的信息包括裁片的面料信息,刺绣图案信息包括刺绣图案的位置信息;
18、调用可执行所述刺绣工艺的刺绣设备从智能吊挂输送装置上获取裁片并进行刺绣作业的方法包括:
19、获取智能吊挂输送装置的图片并进行图像识别,确定裁片在智能吊挂输送装置上的位置,以及第一机械臂和第二机械臂分别在裁片上的夹持位置;
20、发出夹持指令,使第一机械臂和第二机械臂从智能吊挂输送装置上夹持裁片;
21、基于裁片的面料信息确定第一机械臂和第二机械臂施加给裁片的设定夹持力和设定上绷张力,发出张拉指令,使第一机械臂和第二机械臂对裁片上绷,获取压力传感器和张力传感器数据,并分别与设定夹持力和设定上绷张力对比,从而判断是否上绷到位;
22、获取第一机械臂和第二机械臂间裁片的图片并进行图像识别,基于刺绣图案的位置信息确定刺绣图案在裁片上的位置;
23、发出刺绣指令,使第一机械手和第二机械手按自动生成刺绣工艺和人工调整后最终确定的针迹进行刺绣。
24、优选的是,刺绣过程中,每隔预设时间长获取一次压力传感器和张力传感器数据,将压力传感器和张力传感器数据分别与设定夹持力和设定上绷张力对比,从而判断裁片是否松弛,若裁片松弛则加大第一机械臂和第二机械臂施加给裁片的夹持力和/或上绷张力。
25、优选的是,第一机械臂和第二机械臂的夹持部的夹持面设置有硅胶层,所述硅胶层表面均匀布设有若干凹点,以用于增大与裁片间的摩擦力;
26、所述第一机械手和第二机械手的食指中段设置有顶针环,食指与中指间还设置有剪切装置;
27、所述第一机械手和第二机械手的食指指腹或拇指指腹内设置有电磁铁,以用于电磁铁通电吸附绣针;所述第一机械手和第二机械手的食指表面均设置有压力传感器,以用于获取第一机械手和第二机械手分别对绣针的夹持力;所述第一机械手和第二机械手的食指表面和拇指表面还设置有硅胶层,以用于增大与绣针间的摩擦力。
28、本发明还提供一种在裁片上进行传统手工刺绣的无人化作业系统,包括:
29、裁片信息获取模块,其用于获取裁片的信息;
30、图案信息获取模块,其用于获取刺绣图案信息;
31、工艺针迹生成模块,其用于基于刺绣图案信息进行自动分色并自动生成刺绣工艺和针迹;
32、路径生成模块,其用于基于预先构建的虚拟服装生产车间和裁片的信息确定裁片的位置,基于虚拟服装生产车间和刺绣工艺确定可执行所述刺绣工艺的刺绣设备的位置,基于裁片的位置和可执行所述刺绣工艺的刺绣设备的位置生成移动路径。
33、调度模块,其用于调用智能吊挂输送装置按移动路径将裁片从当前位置运送至可执行所述刺绣工艺的刺绣设备位置;
34、刺绣模块,其用于调用可执行所述刺绣工艺的刺绣设备从智能吊挂输送装置上获取裁片并进行刺绣作业。
35、本发明还提供一种电子设备,其特征在于,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器执行上述的在裁片上进行传统手工刺绣的无人化作业方法。
36、本发明至少包括以下有益效果:构建基于数字孪生的虚拟服装生产车间后,结合本司研发的服装供销方法和智能吊挂输送装置,使得裁片的转运过程完全自动化,同时再结合现有的机械手和机械臂技术,将刺绣过程中运用到的针法程序提前保存于数据库中,在自动生成刺绣工艺和针迹后,根据针迹顺序自动调动机械手和机械臂技术按刺绣工艺完成当前针迹的刺绣工作,由于图像识别、数字孪生等多种技术的综合应用,使得裁片上不再需要上稿,同时上绷也可以用机械臂完成,因此不仅简化了手工刺绣工序,还提升了产业自动化程度,降低了人工成本,且机械手刺绣可采用不同的刺绣工艺综合运用,保留了传统手工刺绣的特色。
37、本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
- 还没有人留言评论。精彩留言会获得点赞!