一种半导体材料自动化切割装置的制作方法
1.本发明涉及半导体技术领域,具体为一种半导体材料自动化切割装置。
背景技术:
2.半导体指常温下导电性能介于导体与绝缘体之间的材料,半导体在集成电路、消费电子、通信系统、光伏发电、照明、大功率电源转换等领域都有应用,如二极管就是采用半导体制作的器件,无论从科技或是经济发展的角度来看,半导体的重要性都是非常巨大的,大部分的电子产品,如计算机、移动电话或是数字录音机当中的核心单元都和半导体有着极为密切的关联。
3.目前市场的半导体切割都是依靠人工进行切割,此过程非常的不稳定可能会出现半导体切割偏斜,导致半导体损坏无法合格,人工切割只能一次一次的进给和旋转,无法连贯的进行切割,会大大影响切割的效率,增加工人的劳动强度,如果设置自动进给或者自动翻转装置,通常需要额外为进给装置和翻转装置单独提供动力源,增加企业成本;而切割时发出的热量会对半导体造成损害,可能会影响半导体的使用,增加报废率的问题,故而提出一种半导体材料自动化切割装置来解决上述所提出的问题。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种半导体材料自动化切割装置,解决了人工切割半导体不稳定、效率低下及切割时的热量会对半导体造成损害的问题。
5.为实现上述目的,本发明提供如下技术方案:一种半导体材料自动化切割装置,包括工作台,所述工作台的右侧焊接有支撑板,所述支撑板和工作台的前部和后部均焊接有挡板,所述支撑板的底部焊接有连接板,所述支撑板的右侧设置有传动机构,所述连接板的左侧设置有翻转机构,所述支撑板的顶部开设有透气孔,所述工作台的左侧焊接有侧板,所述侧板的顶部设置有切割机构。
6.优选的,所述传动机构包括有一号电机,所述一号电机的输出端卡接有一号链轮,所述一号链轮的数量设置有十个,且十个一号链轮的轴心处均转动连接在支撑板的左侧,所述支撑板的左侧转动连接有二号链轮,所述二号链轮位于一号链轮的前部,且十个一号链轮的表面通过链条与二号链轮的表面传动连接,所述二号链轮的轴心处通过连杆卡接有一号皮带轮,所述一号皮带轮的表面通过皮带与二号皮带轮的表面传动连接,所述链条的左侧转动连接有滑块,所述滑块的表面滑动连接有连接块,所述连接块的下表面焊接有连接杆,所述连接杆的内壁转动连接有卡块,所述卡块的上表面焊接有支撑弹簧。
7.优选的,所述一号电机的左侧通过螺栓连接在支撑板,所述连接杆的表面与工作台的内壁滑动连接,所述支撑弹簧的顶端与连接杆的内壁焊接固定,所述二号皮带轮的左侧设置有散热装置。
8.优选的,所述散热装置包括有固定块,所述固定块的内壁转动连接有传动轴,所述传动轴的左端焊接有一号锥齿轮,所述一号锥齿轮的表面啮合有二号锥齿轮,所述二号锥
齿轮的轴心处通过连杆固定安装有风扇。
9.优选的,所述固定块的底部与支撑板的顶部焊接固定,所述传动轴的右端与二号皮带轮的轴心处卡接固定。
10.优选的,所述翻转机构包括有固定板,所述固定板的内壁转动连接有转轴,所述转轴的表面卡接有棘轮,所述转轴的左端焊接有旋转块,所述旋转块的下表面插接有拨杆,所述工作台的内壁活动连接有导柱,所述导柱的两端分别焊接有顶板和旋转板,且旋转板位于顶板的下方,所述工作台的底部焊接有限位块,所述顶板的顶部放置有半导体本体。
11.优选的,所述固定板的顶部与工作台的底部焊接固定,所述棘轮的表面与卡块的表面相互接触,所述旋转块的上表面与旋转板的下表面相互接触,所述旋转板的表面与限位块的表面相互接触,所述顶板的表面与工作台的内壁活动连接。
12.优选的,所述切割机构包括有移动柱,所述移动柱的左端转动连接有滑轮,所述移动柱的下表面通过螺栓连接有二号电机,所述二号电机的输出端焊接有传动杆,所述传动杆的上表面转动连接有从动杆,所述移动柱的内壁滑动连接有限位柱,所述移动柱的表面滑动连接有滑板,所述滑板的内壁分别转动连接有刀片和支撑杆,且支撑杆位于刀片的上方,所述支撑杆和滑板之间焊接有收缩弹簧,所述支撑杆的前部和后部均转动连接有滚轮。
13.优选的,所述移动柱的右端与连接块的左侧焊接固定,所述滑轮的表面与侧板的顶部相互接触,所述滚轮的表面与工作台的上表面相互接触。
14.与现有技术相比,本发明提供了一种半导体材料自动化切割装置,具备以下有益效果:
15.1、通过传动机构和切割机构的配合运作,可以实现自动对半导体进行进给加切割,从而无需人工手动切割半导体,防止人工不稳定导致半导体被切割偏移致使损坏,进而增加成本低投入,实用性较低。
16.2、通过传动机构中的散热装置可以对半导体切割时发出的热量进行散热,从而可以减少切割时产生的热量,防止半导体因温度过高导致其损坏。
17.3、通过翻转机构可以在一个轴向被切割完成后将半导体进行翻转,使其继续切割另一个轴向,从而使切割更加连贯,无需停顿手动转动,增加了工作效率。
18.4、通过切割机构中的支撑杆可以在切割时用滚轮压在半导体上,从而可以进一步增加半导体切割时的稳定性,减少半导体的晃动导致的不合格品的产生,实用性大大增加。
19.5、通过一个一号电机一个动力源可以同时带动切割时的进给、半导体的翻转及散热装置的运作,从而可以减少动力源的放置数量,进而减少成本低投入,还可以减少空间的占用,实现各个机构之间同步运作,工作效率得以提升。
附图说明
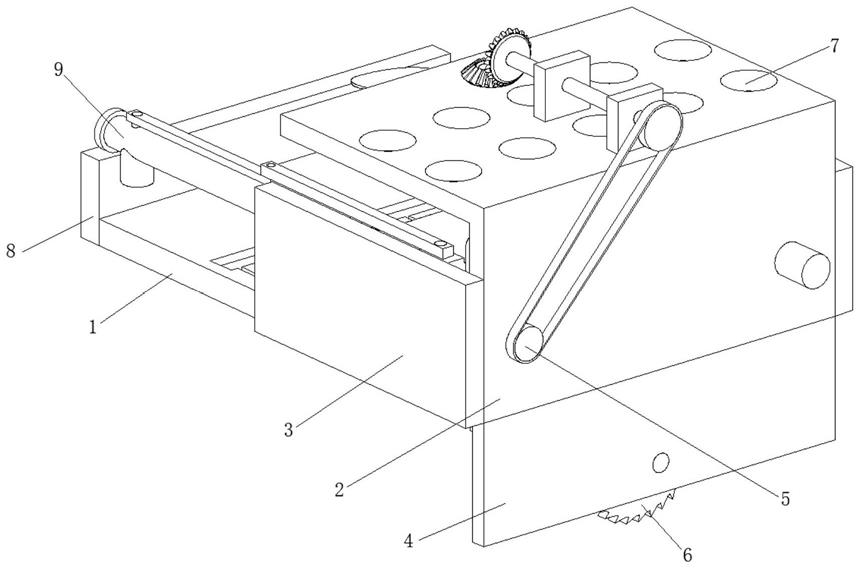
20.图1为本发明提出的一种半导体材料自动化切割装置整体结构示意图;
21.图2为本发明提出的一种半导体材料自动化切割装置传动机构示意图;
22.图3为本发明提出的一种半导体材料自动化切割装置散热装置示意图;
23.图4为本发明提出的一种半导体材料自动化切割装置传动机构部分结构示意图;
24.图5为本发明提出的一种半导体材料自动化切割装置传动机构部分结构放大图;
25.图6为本发明提出的一种半导体材料自动化切割装置翻转机构示意图;
26.图7为本发明提出的一种半导体材料自动化切割装置切割机构示意图;
27.图8为本发明提出的一种半导体材料自动化切割装置切割机构部分结构示意图。
28.图中:1、工作台;2、支撑板;3、挡板;4、连接板;5、传动机构;51、一号电机;52、一号链轮;53、链条;54、二号链轮;55、一号皮带轮;56、二号皮带轮;57、散热装置;571、固定块;572、传动轴;573、一号锥齿轮;574、二号锥齿轮;575、风扇;58、滑块;59、连接块;511、连接杆;512、卡块;513、支撑弹簧;6、翻转机构;61、固定板;62、转轴;63、棘轮;64、旋转块;65、拨杆;66、旋转板;67、导柱;68、限位块;69、顶板;611、半导体本体;7、透气孔;8、侧板;9、切割机构;91、移动柱;92、二号电机;93、滑轮;94、传动杆;95、从动杆;96、限位柱;97、滑板;98、刀片;99、支撑杆;911、收缩弹簧;912、滚轮。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.一种半导体材料自动化切割装置,如图1-图6所示,包括工作台1,工作台1的右侧焊接有支撑板2,支撑板2和工作台1的前部和后部均焊接有挡板3,支撑板2的底部焊接有连接板4,支撑板2的右侧设置有传动机构5,连接板4的左侧设置有翻转机构6,支撑板2的顶部开设有透气孔7,工作台1的左侧焊接有侧板8,侧板8的顶部设置有切割机构9。
31.本实施例中,传动机构5包括有一号电机51,一号电机51的输出端卡接有一号链轮52,一号链轮52的数量设置有十个,且十个一号链轮52的轴心处均转动连接在支撑板2的左侧,支撑板2的左侧转动连接有二号链轮54,二号链轮54位于一号链轮52的前部,且十个一号链轮52的表面通过链条53与二号链轮54的表面传动连接,二号链轮54的轴心处通过连杆卡接有一号皮带轮55,一号皮带轮55的表面通过皮带与二号皮带轮56的表面传动连接,链条53的左侧转动连接有滑块58,滑块58的表面滑动连接有连接块59,连接块59的下表面焊接有连接杆511,连接杆511的内壁转动连接有卡块512,卡块512的上表面焊接有支撑弹簧513,滑块58相对于连接块59只做上下往复运动,但是滑块58相对于工作台1即做上下移动,也做水平往复移动,通过十个一号链轮52和一个二号链轮54可以带动切割机构9跟随链条53的轨迹进行间歇性进给,从而无需人工手动的进行进给,防止人工不稳定导致半导体被切割偏移致使损坏,进而增加成本低投入,实用性较低,工作效率也得以提升。
32.进一步的是,一号电机51的左侧通过螺栓连接在支撑板2上,连接杆511的表面与工作台1的内壁滑动连接,支撑弹簧513的顶端与连接杆511的内壁焊接固定,二号皮带轮56的左侧设置有散热装置57,通过一个一号电机51一个动力源可以同时带动切割时的进给、半导体的翻转及散热装置57的运作,从而可以减少动力源的放置数量,进而减少成本低投入,还可以减少空间的占用,实现各个机构之间同步运作,工作效率得以提升。
33.更进一步的是,散热装置57包括有固定块571,固定块571的内壁转动连接有传动轴572,传动轴572的左端焊接有一号锥齿轮573,一号锥齿轮573的表面啮合有二号锥齿轮574,二号锥齿轮574的轴心处通过连杆固定安装有风扇575,通过固定块571可以将传动轴572进行支撑,防止其在装置运作过程中发生掉落,进而导致装置无法继续使用,进而使实
用性大大缩减,还会增加维护成本。
34.此外,固定块571的底部与支撑板2的顶部焊接固定,传动轴572的右端与二号皮带轮56的轴心处卡接固定,通过散热装置57中的风扇575可以对半导体切割时发出的热量进行散热,从而可以减少切割时产生的热量,防止半导体因温度过高导致其损坏,增加切割后半导体的品质。
35.除此之外,翻转机构6包括有固定板61,固定板61的内壁转动连接有转轴62,转轴62的表面卡接有棘轮63,转轴62的左端焊接有旋转块64,旋转块64的下表面插接有拨杆65,工作台1的内壁活动连接有导柱67,导柱67的两端分别焊接有顶板69和旋转板66,且旋转板66位于顶板69的下方,工作台1的底部焊接有限位块68,顶板69的顶部放置有半导体本体611,通过翻转机构6可以在一个轴向被切割完成后将半导体进行翻转,使其继续切割另一个轴向,从而使切割更加连贯,无需停顿手动转动,增加了工作效率。
36.如图6-图8所示,固定板61的顶部与工作台1的底部焊接固定,棘轮63的表面与卡块512的表面相互接触,旋转块64的上表面与旋转板66的下表面相互接触,旋转块64上表面是平面,下表面是圆弧面,旋转板66为正方形结构,旋转板66其中一条对角线与转轴62的轴线平行,旋转板66的表面与限位块68的表面相互接触,顶板69的表面与工作台1的内壁活动连接,拨杆65可以将顶起的旋转板66进行拨动,防止旋转板66被旋转块64顶起后,无法进行旋转90
°
,进而使装置上的半导体无法被翻转,进而导致半导体只能加工一半,实用性大大降低,不利于推广使用。
37.值得注意的是,切割机构9包括有移动柱91,移动柱91的左端转动连接有滑轮93,移动柱91的下表面通过螺栓连接有二号电机92,二号电机92的输出端焊接有传动杆94,传动杆94的上表面转动连接有从动杆95,移动柱91的内壁滑动连接有限位柱96,移动柱91的表面滑动连接有滑板97,滑板97的内壁分别转动连接有刀片98和支撑杆99,且支撑杆99位于刀片98的上方,支撑杆99和滑板97之间焊接有收缩弹簧911,支撑杆99的前部和后部均转动连接有滚轮912,移动柱91的右端和滑块58的左侧均安装有感应器,当两个感应器处于同一轴线上时,二号电机92会启动并旋转一圈,从而使二号电机92在移动柱91进给时会停止,在移动柱91停止时会启动,可以防止刀片98在工作时,移动柱91进行进给,导致刀片98发生损坏,进而增加维护成本。
38.值得说明的是,移动柱91的右端与连接块59的左侧焊接固定,滑轮93的表面与侧板8的顶部相互接触,滚轮912的表面与工作台1的上表面相互接触,通过切割机构9中的支撑杆99可以在切割时用滚轮912压在半导体上,从而可以进一步增加半导体切割时的稳定性,减少半导体的晃动导致的不合格品的产生,实用性大大增加。
39.本发明的一种半导体材料自动化切割装置在使用时,将半导体放置在工作台1内壁的顶板69上,启动一号电机51,一号电机51带动一号链轮52旋转,一号链轮52通过链条53带动剩余九个一号链轮52和二号链轮54旋转,链条53带动滑块58跟随链条53的轨迹进行移动,可以使滑块58带动连接块59进行间歇式移动,连接块59带动移动柱91进行间歇式移动,每当滑块58移动到移动柱91右侧并与其对齐时,两者之间安装的感应器会处于同一轴线上,这时二号电机92会启动并旋转一圈,二号电机92带动传动杆94旋转,传动杆94带动从动杆95旋转,从动杆95带动滑板97进行移动,滑板97上的刀片98会对半导体进行切割,同时收缩弹簧911会拉动支撑杆99,使其两侧的滚轮912压在半导体切割处的两侧,增加半导体切
割时的稳定性,减少半导体的晃动导致的不合格品的产生,实用性大大增加,从而无需人工手动切割半导体,防止人工不稳定导致半导体被切割偏移致使损坏,进而增加成本低投入,实用性较低,实现了半导体的自动切割,切割的同时二号链轮54带动一号皮带轮55旋转,一号皮带轮55带动二号皮带轮56旋转,二号皮带轮56带动传动轴572旋转,传动轴572带动一号锥齿轮573旋转,一号锥齿轮573带动二号锥齿轮574旋转,二号锥齿轮574带动风扇575旋转,从而可以对半导体切割时发出的热量进行散热,从而可以减少切割时产生的热量,防止半导体因温度过高导致其损坏,当连接块59跟随滑块58向后移动时,下方焊接的连接杆511也会后移,连接杆511带动卡块512后移,当滑块58跟随链条53轨迹向前移动时,连接块59会带动连接杆511移动,连接杆511通过卡块512会带动棘轮63旋转,棘轮63带动转轴62旋转,转轴62带动旋转块64旋转,旋转块64会先将旋转板66顶起,使其不会再与限位块68相接触,这时继续旋转,旋转块64会带动拨杆65将旋转板66推动,使其旋转90
°
,这时旋转块64刚好旋转一圈,旋转板66又会落下,并与限位块68接触,防止旋转板66自行旋转,此过程旋转板66会先带动导柱67升起,导柱67带动顶板69上移,顶板69带动半导体本体611升起,半导体升起后会被旋转板66带动旋转90
°
进行自动翻转,从而可以在一个轴向被切割完成后将半导体进行翻转,使其继续切割另一个轴向,进而使切割更加连贯,无需停顿手动转动,增加了工作效率。需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1