预制混凝土构件垫块智能组合投放系统及方法与流程
1.本发明涉及一种预制混凝土构件垫块智能组合投放系统及方法,属于装配式预制构件施工技术领域。
背景技术:
2.装配式建筑施工时,预制构件与混凝土现浇部位之间需预留2公分的拼接缝,由于混凝土浇筑误差,实际所需拼接缝可能大于或小于2公分,这样不利于预制构件的精准对接。
3.目前多采取在指定位置人工布设2公分厚垫块的方式进行拼接缝预留,需一人测量构件标高一人投放垫块,耗费人力且效率低下,同时由于混凝土浇筑偏差,固定投放2公分厚垫块有可能导致拼接缝过大或过小,使待安装构件底部标高与设计标高存在偏差。针对此类问题,工程上目前还没有对应的施工装置予以解决。
技术实现要素:
4.针对现有技术中预制构件拼接缝处垫块设置存在效率低下且拼接缝大小难以保证致使待安装构件底部标高与设计标高存在偏差的问题,本发明提供了一种预制混凝土构件垫块智能组合投放系统及方法。
5.为解决以上技术问题,本发明包括如下技术方案:
6.一种预制混凝土构件垫块智能组合投放系统,包括智能测控仪、测量尺、垫块投放装置和控制器;
7.所述垫块投放装置包括壳体、若干垫块储存箱、拨动装置、输送装置、喷胶装置和搁置仓;所述壳体上设置有上下贯通的测量尺槽口,测量尺设置于所述测量尺槽口内;所述壳体下方设置有支撑装置,并通过支撑装置固定在已施工构件上;所述壳体底部靠近测量尺的位置上设置有搁置仓,搁置仓下方设置有仓门;同一个所述垫块储存装置内存储有相同厚度的垫块;所述垫块储存装置底部伸入壳体内,并设置有垫块的出口;每一个垫块储存装置配有一个所述拨动装置,所述拨动装置固定在壳体内,用于将最底部的垫块从出口推出;所述输送装置位于所述垫块储存装置的正下方,用于将垫块运输至搁置仓中;所述搁置仓位于所述输送装置端部下方,所述搁置仓底部设置有仓门;所述喷胶装置用于对搁置仓中的垫块上表面喷胶;
8.智能测控仪用以自动读取测量尺读数,并将读数传输给控制器;
9.控制器设置于所述壳体上,用以接收智能测控仪读取的数据,计算测量尺下方已施工构件的标高,计算补偿高度及需要的垫块规格和数量,控制拨动装置拨动相应垫块,控制输送装置启闭,控制喷胶装置喷胶,并控制搁置仓仓门开合。
10.进一步,智能测控仪配置有遥控器,作业人员手持遥控器对智能测控仪进行控制,当测量尺位于智能测控仪的测量范围内时,智能测控仪向遥控器反馈信号。
11.进一步,所述拨动装置包括拨动电机、拨动板和传动连接件,所述拨动板的厚度小
于垫块的厚度,拨动电机通过传动连接件带动拨动板直线往返移动,从而推动底部垫块从出口移出。
12.进一步,所述拨动装置包括拨动电机、拨动板和传动连接件,所述拨动板包括两个间隔设置的扇形板,所述扇形板的厚度小于垫块的厚度,所述拨动板上位于两个扇形板连接部设置有转轴,所述转轴垂直于所述扇形板;拨动电机通过传动连接件带动转轴转动,使扇形板旋转,扇形板推动底部垫块从出口移出。
13.进一步,所述输送装置包括输送电机、两个辊筒和传输带;传输带环绕两个辊筒,输送电机与其中一个辊筒的滚轴相连,通过驱动辊筒旋转从而带动传输带转动。
14.相应地,本发明还提供了一种预制混凝土构件垫块智能组合投放系统的施工方法,包括:
15.架设智能测控仪的支架并调平,安装智能测控仪;
16.将测量尺放置于已知标高点,智能测控仪读取测量尺读数并将读数发送至控制器;
17.移动垫块投放装置至已施工构件上,将测量尺竖直插入垫块投放装置壳体上的测量尺槽口中,测量尺底部搁置在已施工构件上;智能测控仪读数并将读数发送至控制器;
18.控制器内预设有待安装构件的设计标高h0,控制器计算实测标高h1,及实测标高h1与设计标高h0的标高差值
△
h1;控制器以标高差值
△
h1为控制数据计算需要的垫块规格及数量;
19.控制器控制拨动装置依次拨动相应的垫块至输送装置上,并通过输送装置运输至搁置仓中;在下一个垫块滑落至搁置仓之前,控制器控制喷胶装置对搁置仓中的垫块上表面进行喷胶处理;
20.待所有的垫块均输送至搁置仓中,并经喷胶固定后,在控制器的控制下打开搁置仓的仓门,使满足补偿高度要求的垫块组合件跌落至测量尺旁。
21.本发明由于采用以上技术方案,使之与现有技术相比,具有以下的优点和积极效果:预制混凝土构件垫块智能组合投放系统的智能测控仪能够自动读取测量尺读数,并将读数传输给控制器,由控制器计算需要的补偿高度及需要的垫块规格和数量,然后拨动装置拨动相应的垫块至输送装置,由输送装置传送至搁置仓中,通过喷胶装置将垫块上下粘结固定,然后打开搁置仓的仓门,使满足补偿高度要求的垫块组合件跌落至测量尺旁,该系统能够实现测量、垫块投放一体化操作,一人即可完成操作,减少了人工,精简操作步骤,提高施工效率,减少人为误差,提高作业精度。
附图说明
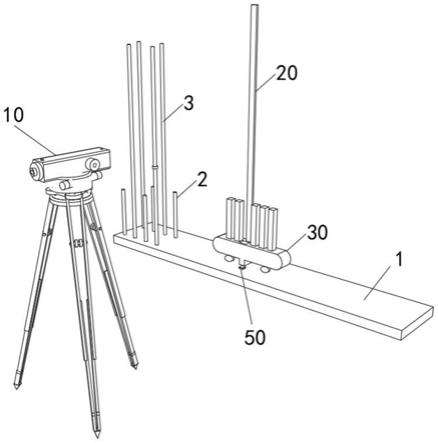
22.图1为本发明中的预制混凝土构件垫块智能组合投放系统的结构示意图;
23.图2为本发明中的垫块投放装置的剖视图;
24.图中标号如下:
[0025]1‑
已施工构件;2
‑
连接钢筋;3
‑
柱钢筋;
[0026]
10
‑
智能测控仪;20
‑
测量尺;30
‑
垫块投放装置;40
‑
控制器;50
‑
垫块;
[0027]
31
‑
壳体;32
‑
支撑装置;33
‑
垫块储存箱;34
‑
拨动装置;35
‑
输送装置;36
‑
喷胶装置;37
‑
搁置仓;38
‑
溜板。
具体实施方式
[0028]
以下结合附图和具体实施例对本发明提供的预制混凝土构件垫块智能组合投放系统及方法作进一步详细说明。结合下面说明,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
[0029]
实施例一
[0030]
结合图1和图2所示,已施工构件1上需要设置预制构件,二者之间需要预留拼接缝,为了保证上方预制构件达到设计标高,需要在已施工构件上设置一定高度的垫块,由于已施工构件1上表面由于施工原因可能存在倾斜、凸凹等现象,因此需要先测定高程,然后计算需要的垫块补偿高度,再放置补偿高度的垫块。本实施例提供的预制混凝土构件垫块智能组合投放系统,就是为了快速实现垫块的补偿高度的计算及垫块的智能投放,减少人为操作,提高施工效率。需要说明的是,已施工构件可以为现浇混凝土构件,也可以为已经安装的预制构件。
[0031]
本实施例提供的预制混凝土构件垫块智能组合投放系统,包括智能测控仪10、测量尺20、垫块投放装置30和控制器40。所述垫块投放装置30包括壳体31、若干垫块储存装置33、拨动装置34、输送装置35、喷胶装置36和搁置仓37。
[0032]
所述壳体31上设置有上下贯通的测量尺槽口,测量尺20竖直设置于测量尺槽口内。所述壳体31下方设置有支撑装置32并通过支撑装置32固定在已施工构件1上,支撑装置32可以为撑腿,为了便于垫块投放装置30移动,优选为,支撑装置32为滚轮。
[0033]
同一个所述垫块储存装置33内存储有相同厚度的垫块50,多个垫块储存装置33用于存放多种厚度的垫块50,比如多个垫块储存装置33中分别存在有厚度为20mm、10mm、5mm、2mm、1mm的垫块50。所述垫块储存装置33底部伸入壳体31内,并设置有垫块的出口,垫块出口水平向设置。
[0034]
每一个垫块储存装置33配有一个所述拨动装置34,所述拨动装置34固定在壳体31内,用于将最底部的垫块50从出口推出。优选为,所述拨动装置34包括拨动电机、拨动板和传动连接件,所述拨动板的厚度小于垫块的厚度,拨动电机通过传动连接件带动拨动板直线往返移动,从而推动底部垫块从出口移出,拨动板返回至起始位置。另一实现方式为,所述拨动装置34包括拨动电机、拨动板和传动连接件,所述拨动板包括两个间隔设置的扇形板,所述扇形板的厚度小于垫块的厚度,所述拨动板上位于两个扇形板连接部设置有转轴,所述转轴垂直于所述扇形板;拨动电机通过传动连接件带动转轴转动,使扇形板旋转,扇形板推动底部垫块从出口移出。
[0035]
所述输送装置35位于所述垫块储存装置33的正下方,用于将垫块运输至搁置仓37中,所述搁置仓位于所述输送装置端部下方,所述搁置仓底部设置有仓门。优选为,所述输送装置35包括输送电机、两个辊筒和传输带;传输带环绕两个辊筒,输送电机与其中一个辊筒的滚轴相连,通过驱动辊筒旋转从而带动传输带转动。进一步,在输送带与搁置仓37之间设置溜板38,使垫块通过溜板38缓慢滑移至搁置仓37中。
[0036]
所述喷胶装置36用于对搁置仓37中的垫块上表面喷胶,使相邻垫块上下叠合固定。
[0037]
控制器40设置于所述壳体上,用以接收智能测控仪10读取的数据,计算测量尺20
下方已施工构件1的标高,计算补偿高度及需要的垫块50的规格和数量,控制拨动装置34拨动相应垫块50,控制输送装置35启闭,控制喷胶装置36喷胶,并控制搁置仓37仓门开合。
[0038]
智能测控仪10用以自动读取测量尺20读数,并将读数传输给控制器40。优选的实施方式为智能测控仪10配置有遥控器,作业人员手持遥控器对智能测控仪10进行控制,当测量尺20位于智能测控仪10的测量范围内时,智能测控仪10向遥控器反馈信号。智能测控仪10可实现自动对焦,这是现有技术可以实现的,不进行赘述。另外,智能测控仪10可以自动读数,也是现有技术可以实现的,具体的读数方式可为读取测量十字丝的水平线与测量尺20重叠处的读数。
[0039]
本实施例提供的预制混凝土构件垫块智能组合投放系统的工作原理为,测量尺20底部搁置在已施工构件1上,智能测控仪10自动读取测量尺20读数,并将读数传输给控制器40;由控制器40计算需要的补偿高度及需要的垫块规格和数量,然后控制拨动装置34拨动相应的垫块至至输送装置,由输送装置传送至搁置仓37中,通过喷胶装置36将垫块上下粘结固定,然后打开搁置仓37的仓门,使满足补偿高度要求的垫块组合件跌落至测量尺20旁。本实施例提供的预制混凝土构件垫块智能组合投放系统能够实现测量、垫块投放一体化操作,一人即可完成操作,减少了人工,精简操作步骤,提高施工效率,减少人为误差,提高作业精度。
[0040]
实施例二
[0041]
本实施例提供了一种实施例一中所述的预制混凝土构件垫块智能组合投放系统的施工方法,包括步骤:
[0042]
架设智能测控仪10的支架并调平,安装智能测控仪10;
[0043]
将测量尺20放置于已知标高点,智能测控仪10读取测量尺20读数并将读数发送至控制器40;作为举例,已施工构件1上设置有连接钢筋2上和柱钢筋3,已知标高点可设置在连接钢筋2上或柱钢筋3上;
[0044]
移动垫块投放装置30至已施工构件1上,将测量尺20竖直插入垫块投放装置30壳体31上的测量尺槽口中,测量尺20底部搁置在已施工构件1上;
[0045]
智能测控仪10读数并将读数发送至控制器40;
[0046]
控制器40内预设有待安装构件的设计标高h0,控制器40计算实测标高h1,及实测标高h1与设计标高h0的标高差值
△
h1,
△
h1为补偿高度;控制器40以标高差值
△
h1为控制数据计算需要的垫块50规格及数量;作为举例,
△
h1=32mm,垫块储存装置33中分别存在有厚度为20mm、10mm、5mm、2mm、1mm的垫块;经计算,需要1块厚度为20mm的垫块、1块厚度为10mm的垫块、1块厚度为2mm的垫块;
[0047]
控制器40控制拨动装置34依次拨动相应的垫块50至输送装置35上,并通过输送装置35运输至搁置仓37中;在下一个垫块滑落至搁置仓37之前,控制器40控制喷胶装置36对搁置仓37中的垫块上表面进行喷胶处理;需要说明的是,若喷胶后的粘结层厚度可控制在0.1mm,因此可在计算需要垫块厚度时可忽略,若单层粘结层厚度超过0.25mm,在计算需要的垫款数量时,需要考虑粘结层厚度;
[0048]
待所有的垫块均输送至搁置仓37中,并经喷胶固定后,在控制器40的控制下打开搁置仓37的仓门,使补偿高度的垫块组合件跌落至测量尺20旁,在已施工构件1上完成一处满足高度补偿的垫块的投放,可移动垫块投放装置30至施工构件的下一个位置进行测量及
垫块的投放。搁置仓37的仓门可连仓门电机,控制器40控制仓门电机进行开合,现有技术可以实现,此处不再赘述。
[0049]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0050]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1